自研专题

依托自研力量,给共享集群存储服务一个优选
YashanDB共享集群有三大关键组件,崖山集群服务(YCS)、崖山集群文件系统(YFS)、DB组件。上一篇共享集群系列文章《为何共享集群的高可用能力被频频称赞,它的机制有何不同?》深入解析了关键组件的高可用机制与核心技术,本文将深入探讨崖山集群文件系统(YFS)关键技术和特性,并阐释我们选择自主研发共享集群存储服务组件的原因。 崖山集群文件系统(YFS)是YashanDB的一个用户态存储服

历经三年磨砺,快手交换机的自研创新之路
导读: 快手自研交换机是2021年初开始立项,坚持软件自主可控 / 硬件生态开放的整体战略,历经三年磨砺,发布扛鼎之作『快手自研51.2T交换机』,是首家引入多元化交换芯片并在数据中心网络中规模化部署!更是首家采用国产化交换芯片并规模部署落地! 开放多元化,助力行业生态健康发展 交换机作为数据中心网络架构的基石,肩负着数据传输、设备互联等关键职责,其重要性不言而喻。2021年初,彼时

9 自研rgbd相机基于rk3566之qt框架开发tof图像处理线程
qt框架开发tof图像处理线程 tof线程功能及处理流程1 tof线程分为如下几个功能:2 tof线程的处理流程如下: tof线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 tof线程程序示例1 线程头文件:pthread_tof.h2 线程源文件:pthread_tof.cpp tof线程功能及处理流程 1 tof线程分为如下几个功能: 1 v4l2采图部分,将
9 自研rgbd相机基于rk3566之qt框架开发rgb图像处理线程
qt框架开发rgb图像处理线程 rgb线程功能及处理流程1 rgb线程分为如下几个功能:2 rgb线程的处理流程如下: rgb线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 rgb线程程序示例1 线程头文件:pthread_33d_sc2310.h2 线程源文件:pthread_33d_sc2310.cpp rgb线程功能及处理流程 1 rgb线程分为如下几个功能:

8 自研rgbd相机基于rk3566之sensor图像解析与AWB算法原理
自研rgbd相机基于rk3566之sensor图像解析与AWB开发 1、sensor-raw图解析介绍2、sensor-raw图解析程序详解常规raw10-to-raw16数据解析sc2310-raw10-to-raw16图像解析gc2053/gc2093 raw图像解析 3、sensor-awb及常用算法程序bayer bggr to rgb 图像解析简单白平衡算法灰度世界法白平衡算法完美
6 自研rgbd相机基于rk3566之深度计算库移植及测试
自研rgbd相机基于rk3566之深度相机计算库移植及测试 tof深度计算库移植1 移植步骤2 .so 动态库交叉编译3 动态链接库的测试 测试程序库调用头文件 w_33d_depth.h调用源文件 w_33d_depth.c tof深度计算库移植 1 移植步骤 深度计算库包括深度图像解析,读入eeprom标定参数进行深度矫正与深度还原,原始深度数据输出。 需要将深度库从win
6 自研rgbd相机基于rk3566之深度计算库程序详解
自研rgbd相机基于rk3566之深度计算库详解 1 tof深度计算库框架读入深度图像参数配置tof模组标定参数读入及解析深度计算函数接口 2 tof深度计算库程序详解深度计算程序头文件深度计算程序 源文件 1 tof深度计算库框架 读入深度图像参数配置 支持raw8/raw10/raw16 格式 /**************************RAW8 1280*

7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目
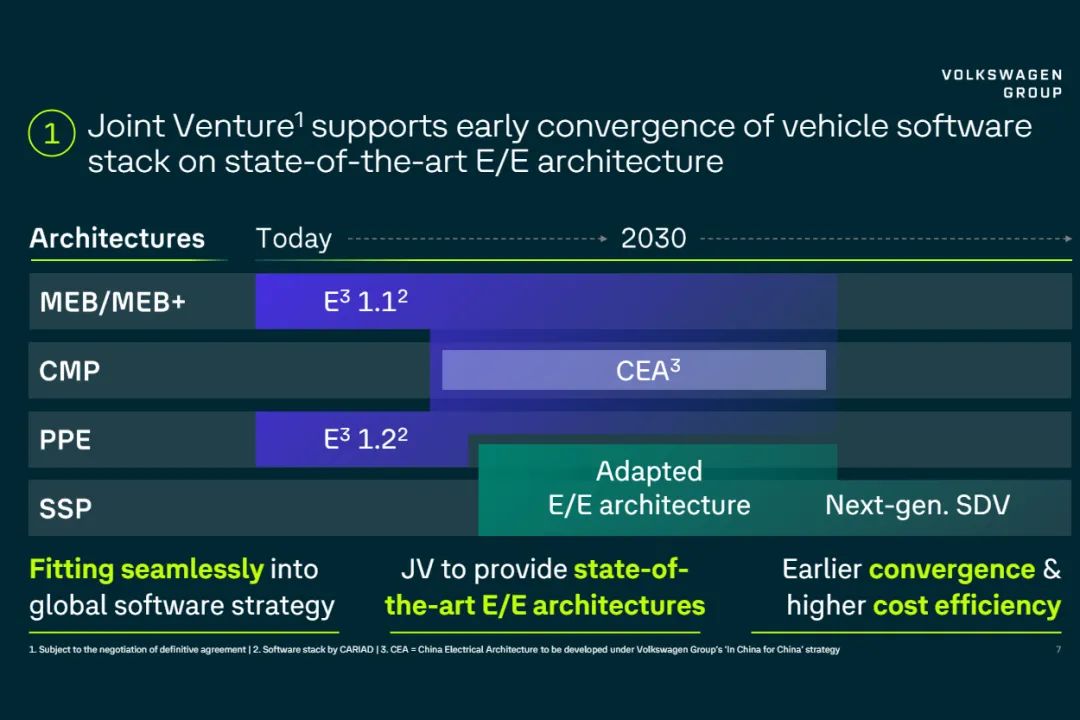
车企重新审视「自研」
一直以来,“全栈自研”成了车企布局智能化赛道的关键词,尤其是「软件定义汽车」被视为行业游戏规则的改变者。然而,在很多供应商看来,“运营一个高效的内部软件开发团队,极具挑战性。” 至少到目前为止,软件全栈自研的梦想,并非适合所有车企。 本周,通用汽车突然宣布,正在全球范围内裁减超过1000名软件部门员工。而在两个月前,该公司刚刚任命两位前苹果公司高管负责软件和服务部门,此次裁员也正是这个
5 自研rk3566/rk3588+rgbd相机之v4l2-rgb出图框架开发二
自研rk3566/rk3588+rgbd相机之v4l2出图框架开发二 1 v4l2框架介绍打开视频设备文件节点初始化视频设备:启动视频采集:停止视频采集:关闭视频设备节点: 2 linux-v4l2 rgb-sensor出图格式配置配置脚本如下:v4l2-sc2310-cap.sh配置脚本如下:v4l2-gc2093-cap.sh配置脚本如下:v4l2-gc2053-cap.sh 3 lin

华为自研仓颉编程语言测试版上线,计划持续到10月21号
现如今,编程语言作为构建软件世界的基石,其重要性不言而喻。 而华为,作为全球领先的信息与通信技术(ICT)解决方案提供商,其在技术创新上的每一步都备受瞩目。最近,华为再次成为焦点,因为他们自主研发的仓颉编程语言测试版已经上线,并且计划持续到10月21号。 一、华为仓颉编程语言的起源与发展 早在2020年,华为就开始着手研发这款名为“仓颉”的编程语言。 同年8月,华为申请注册了“仓颉语言
高性能网络SIG月度动态:自研 IPPROTO_SMC 贡献 Linux 社区,virtio 增加多项优化
高性能网络 SIG(Special Interest Group) :在这个万物互联的时代,云上的网络通信效率对各种服务至关重要,高性能网络兴趣组致力于利用 XDP、RDMA、VIRTIO 等新高效通信技术,结合软硬件一体化的思想,打造高性能网络协议栈,提升云计算时代数据中心应用的网络性能。 一、整体进展 本月高性能网络 SIG 的主要工作聚焦在 ANCK virtio 以及 SMC 上。

低代码结合自研项目打包发布
nginx配置 #user nobody;worker_processes 1;#error_log logs/error.log;#error_log logs/error.log notice;#error_log logs/error.log info;#pid logs/nginx.pid;events {worker_connections 102

自研P2P镜像分发系统
Overview 镜像P2P主要用于解决大规模容器分发场景下的镜像拉取性能问题,目前主流的开源解决方案有Dragonfly(Alibaba)以及Kraken(Uber), 这两种解决方案各有优缺点,设计模式也各有不同: Dragonfly:采用supernode中心控制设计模式,所有的peer数据传输任务都由supernode负责调度,整个集群将管理集中在supernode组件Kraken:采
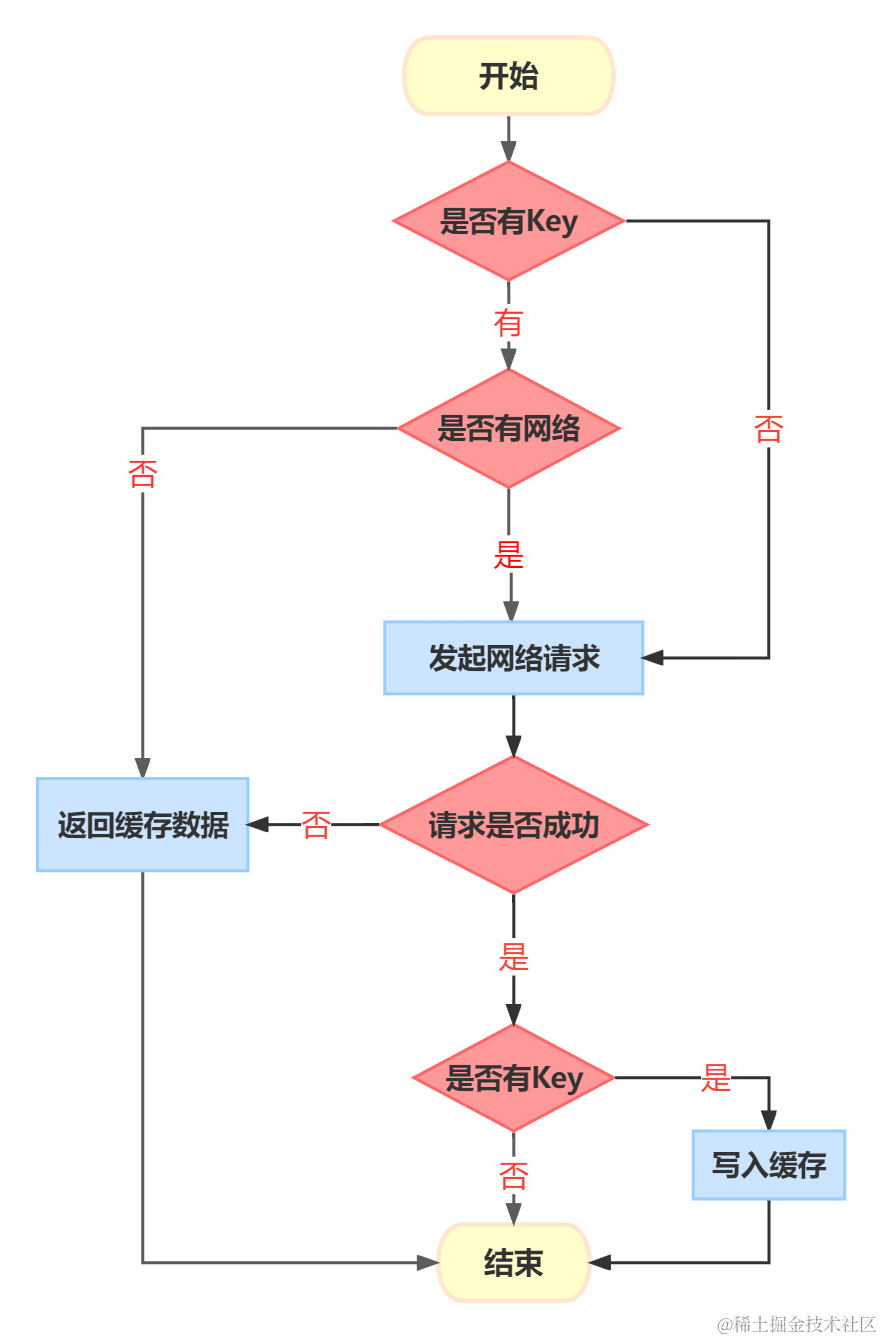
自研一套带双向认证的Android通用网络库
当前,许多网络库基于Retrofit或OkHttp开发,但实际项目中常需要定制化,并且需要添加类似双向认证等安全功能。这意味着每个项目都可能需要二次开发。那么,有没有一种通用的封装方式,可以满足大多数项目需求?本文将介绍一种通用化的封装方法,帮助你用最少的代码量开发出自己的网络库。 框架简介 FlexNet 网络库是基于 Square 公司开源的 Retrofit 网络框架进行封装的。Retr

YOLOv10涨点改进:原创自研 | GhostNet融合 | 从廉价的操作中生成更多的特征图
文章目录 GhostNet理论基础实验部分 改进方案新增yolov10s-ghost.yaml文件代码运行 GhostNet理论基础 Ghost Module是一种模型压缩的方法,即在保证网络精度的同时减少网络参数和计算量,从而提升计算速度(speed),降低延时(latency)。Ghost 模块可以代替现有卷积网络中的每一个卷积层。基于Ghost模块,论文作者堆叠Ghos

无脑歧视项目外包公司,吹捧自研产品公司,都是不理性的。
经常看到有人在网上说软件开发外包公司的各种不好,还说有外包经历是简历的污点,贝格前端工场作为项目公司(非驻场人力外包),要为我们这种类型外包公司说两句。 一、项目外包是社会分工的必然结果 你想喝牛奶,难道要自己养牛吗,你要吃鸡蛋,需要自己喂鸡吗?显然没有必要! 社会分工就早就替你做了这一切,所以你仅需购买牛奶和鸡蛋即可。 同样一个公司需要开发个软件,难道要自己养个开发团队吗?为什么这么简单
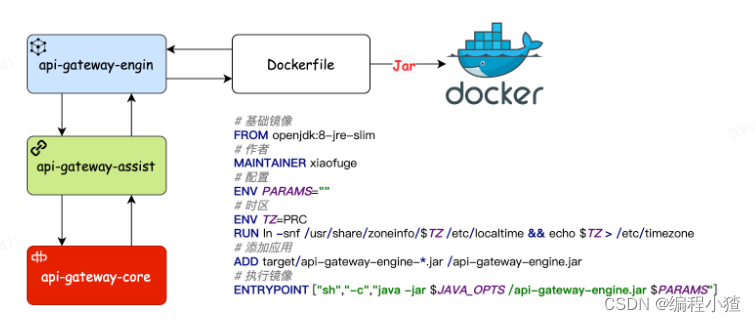
InfiniGate自研网关实现五
17.核心通信组件管理和处理服务映射 引入模块api-gateway-core 到 api-gateway-assist 中进行创建和使用,并拉取自注册中心的映射信息注册到本地的网关通信组件中。 第17节是在第15节的基础上继续完善服务发现的相关功能,把从注册中心拉取的网关映射信息【系统、接口、方法】映射到本地通信组件中。这样就算完成了注册中心到本地服务的一个打通处理,映射完成后就可以通过HT

人脸美妆SDK解决方案,自研人脸美妆方案
美妆已经成为视频内容中不可或缺的一部分。从拍摄到编辑,再到直播,美妆效果都能为视频内容增添魅力,吸引更多观众的眼球。为了满足企业对于高质量美妆效果的需求,美摄科技凭借多年的技术积累和创新精神,推出了全新的人脸美妆SDK解决方案。 一、自研人脸美妆方案:精确与创新的完美结合 美摄科技的人脸美妆SDK解决方案,采用自研的人脸美妆方案,结合精确的人脸关键点检测技术,能够准确捕捉面部的每一个细节。通过
YOLO自研模块:多尺度轻量化卷积模块
目录 一、原理 二、代码 三、配置文件 一、原理 不同大小的卷积核,提取目标特征的特征尺度不同,所以通过使用不同大小卷积核的卷积来提取特征就可以保证获取到目标的多尺度特征。 借鉴YOLOv8中,将通道数进行划分的操作,在卷积的输入过程中为了减小参数量,将输入通道数一分为二,一部分保持不变,另一部分进行特征提取

【自研网关系列】过滤器链 -- 灰度发布过滤器
🌈Yu-Gateway::基于 Netty 构建的自研 API 网关,采用 Java 原生实现,整合 Nacos 作为注册配置中心。其设计目标是为微服务架构提供高性能、可扩展的统一入口和基础设施,承载请求路由、安全控制、流量治理等核心网关职能。 🌈项目代码地址:https://github.com/YYYUUU42/YuGateway-master 如果该项目对你有帮助,可以在 github

【自研网关系列】过滤器链 -- 鉴权过滤器
🌈Yu-Gateway::基于 Netty 构建的自研 API 网关,采用 Java 原生实现,整合 Nacos 作为注册配置中心。其设计目标是为微服务架构提供高性能、可扩展的统一入口和基础设施,承载请求路由、安全控制、流量治理等核心网关职能。 🌈项目代码地址:https://github.com/YYYUUU42/YuGateway-master 如果该项目对你有帮助,可以在 github
一种基于YOLOv8改进的高精度红外小目标检测算法 (原创自研)
💡💡💡本文摘要:一种基于YOLOv8改进的高精度小目标检测算法, 在红外小目标检测任务中实现暴力涨点; 💡💡💡创新点: 1)SPD-Conv特别是在处理低分辨率图像和小物体等更困难的任务时优势明显; 2)引入Wasserstein Distance Loss提升小目标检测能力; 3)YOLOv8中的Conv用cvpr2024中的DynamicConv代替; 原创组合创新,可直
数安市场张力拉满!美创科技5款自研产品见榜官方优质产品推荐目录
近日,美创数据安全管理平台(DSM Cloud)、灾备一体化平台(DRCC v3.0 )等5款产品入选由杭州市经济和信息化局组织申报的“2024年杭州市优质产品推荐目录”,数据安全产品实力再获认可。 据悉,为全面贯彻落实市政府全体(扩大)会议精神,鼓励优质杭产品抢订单拓市场,提高市场占有率,杭州市经济和信息化局组织开展2024年杭州市优质产品推荐目录申报工作。 此次5款产品入选

国产3D自研技术如何突围?眸瑞科技给3D建设、管理带来全新模式
眸瑞科技是全球领先的数字孪生引擎技术及服务提供商,它专注于让一切3D模型在全网多端轻量化处理与展示,为行业数字化转型升级与数字孪生应用提供成套的国产自研3D可视化技术、产品与服务。 引言 眸瑞科技是全球领先的数字孪生引擎技术及服务提供商,它专注于让一切3D模型在全网多端轻量化处理与展示,为行业数字化转型升级与数字孪生应用提供成套的国产自研3D可视化技术、产品与服务。 ▌ 眸瑞自研