罗德里格斯专题
罗德里格斯旋转公式证明-简洁
罗德里格斯旋转公式证明。 设旋转向量为 ( n , θ ) (n, \theta) (n,θ),设其对应的旋转矩阵为 R R R, 如何证明? R = c o s θ I + n ∧ s i n θ + ( 1 − c o s θ ) n n T R=cos\theta I + n^{\wedge}sin\theta+(1-cos\theta)nn^{T} R=cosθI+n∧sinθ+(1


罗德里格斯公式的推导过程
最近在学高翔博士的《视觉SLAM十四讲》,看到第三章中的课后题中要求理解罗德里格斯公式的推导过程,所以在CSDN上搜了一篇文章,原文链接http://blog.csdn.net/q583956932/article/details/78933245 原文写的十分精湛,大家可以直接看原文就好了, 以下是我在看这篇文章时所需要巩固的知识点(现在是大三狗,早把大一的知识点忘了。。。) 点积(来自维
四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料
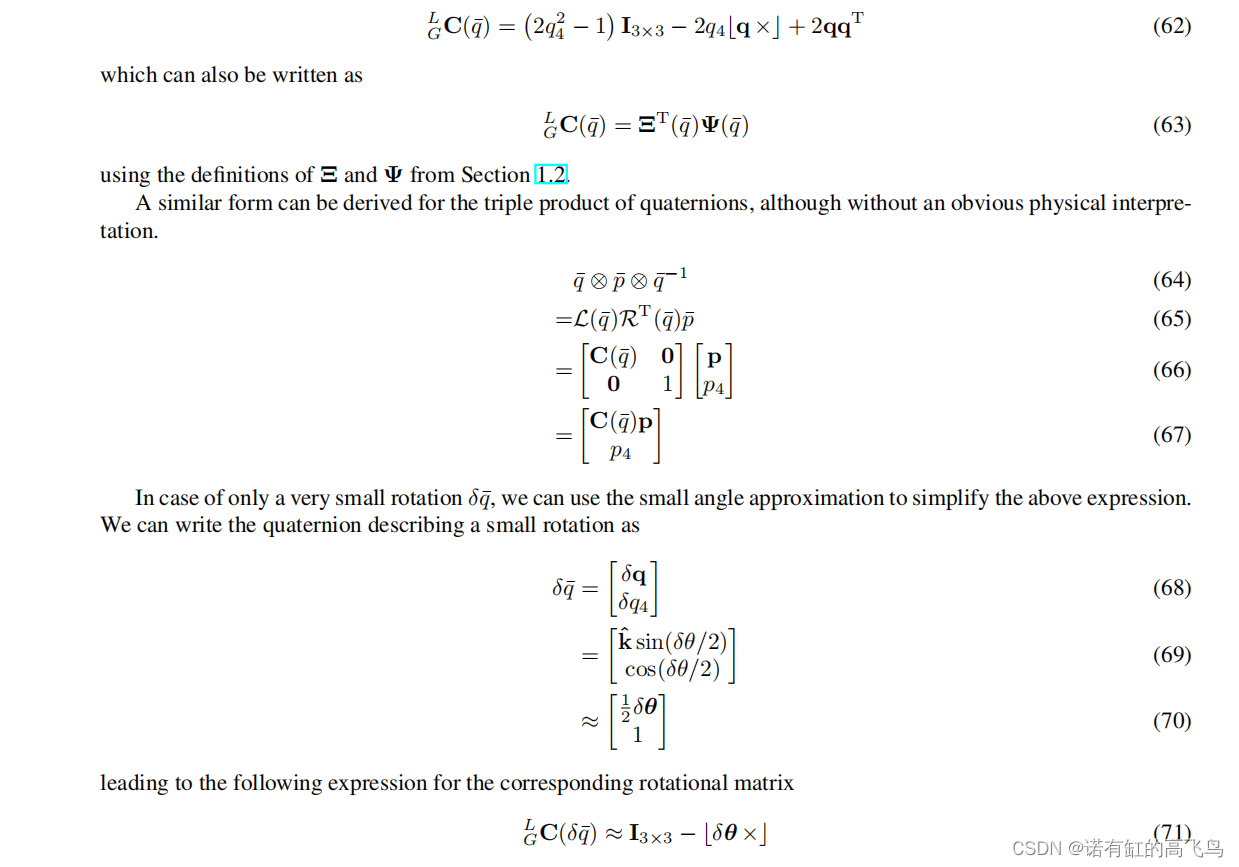
目录 写在前面资料罗德里格斯公式推导几种表达方式 四元数转旋转矩阵近似四元数与轴角 转换代码欧拉角转旋转矩阵旋转矩阵转欧拉角和四元数 参考完 写在前面 1、本文内容 四元数、罗德里格斯公式、欧拉角、旋转矩阵推导和资料 2、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/126002167 资料 四元数 Un
罗德里格斯(Rodrigues)变换
opencv C++实现 #include <iostream>#include <opencv2/opencv.hpp>#include <opencv2/core.hpp>int main(){double r_vec[3] = { -2.100418,-2.167796,0.273330 };cv::Mat pr_vec(1, 3, CV_64FC1, r_vec);std::cou

【SLAM学习】罗德里格斯公式推导详细过程
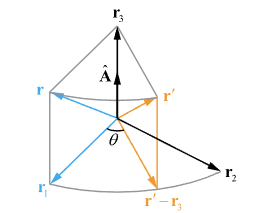
目前,在进实验室之前自己学习SLAM,用的是高翔博士所著的《视觉SLAM十四讲》,其中涉及到罗德里格斯公式,这里讲自己的推导过程记录如下。 罗德里格斯公式如下: 上述公式是在视觉SLAM中常用的公式,可以讲旋转角变换为旋转矩阵,其中R为旋转矩阵,θ为绕轴旋转的角度,n为旋转轴方向的单位向量。 下面给出推导过程: 这是一个证明的辅助示意图(比较粗糙,不要见怪),大致是利用了向量的分解以