真值专题
Tensorflow中显示shape的真值
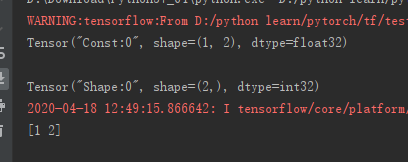
Tensorflow中显示shape的真值 a = tf.constant([[3, 4]], dtype=tf.float32) 可不定义,没有小数点int32,有小数点float32 print(a) print(tf.shape(a)) 这个就是对shape[1,2]的print [1,2]的操作名称是Shape:0,shape是(2),数据类型是Int32 with tf.Sessio


南邮离散数学实验1 (简单版) 根据真值求真值表和主范式
#include <iostream>#include <cmath>using namespace std;int const MAX = 1e6;short true_value[MAX]; //真值short true_table[MAX][10]; //真值表short pdnf[MAX]; //主析取范式short pcnf[MAX]; //主合取范式char

离散数学——(3)联结词及对应的真值指派,最小全功能联结词集,对偶式,范式,范式存在定理,小项
目录 1.联结词及对应的真值指派 2.最小全功能联结词集 3.对偶式 4.范式 1.析取范式 5.范式存在定理 6.小项 1.联结词及对应的真值指派 2.最小全功能联结词集 3.对偶式 4.范式 1.析取范式 5.范式存在定理 6.小项
基于激光雷达的路沿检测用于自动驾驶的真值标注
文章:LiDAR-based curb detection for ground truth annotation in automated driving validation 作者:Jose Luis Apellaniz , Mikel Garc´ıa , Nerea Aranjuelo , Javier Barandiaran and Marcos Nieto 编辑:点云PCL
计算机组成原理-进位计数制(进制表示 进制转换 真值和机器树)
文章目录 现代计算机的结构总览最古老的计数方法十进制计数法推广:r进制计数法任意进制->十进制二进制<--->八进制,十六进制 各种进制常见的书写方式十进制->任意进制整数部分小数部分 十进制->二进制(拼凑法)真值和机器数小结中国古代的二进制系统 现代计算机的结构 总览 最古老的计数方法 一条竖线对应一个苹果,但数量太多竖线太多画不下 后来用横线表示5,所画的线可
【基于激光雷达的路沿检测用于自动驾驶的真值标注】
文章目录 概要主要贡献内容概述实验小结 概要 论文地址:https://arxiv.org/pdf/2312.00534.pdf 路沿检测在自动驾驶中扮演着重要的角色,因为它能够帮助车辆感知道可行驶区域和不可行驶区域。为了开发和验证自动驾驶功能,标注的数据是必不可少的。然而,目前公共数据集中带有标注的点云路沿的数量非常有限。 本文提出了一种从激光雷达传感器捕获的一系列点云中

如何理解A→B的真值
A蕴含B,即为“若A则B”。 其定义的真值表如下: 对于表中的前两项,我们可以理解。但是很多人都不理解第三、四项,为什么A为真,则无论B是真是假,整个表达式都为真,首先需要说明的是这就是定义。 但是还是需要举个例子来更好的理解。如下:假设A => B :如果今天下雨,我就不出门。即A=下雨, B=不出门,则可知“A真,B也真”为真;则“A真,B为假”为假,简单理解,就是“若下雨,然后出门了”这件事