环控制专题

PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。
PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。 PX4的关键模块代码在src文件夹下,位置环控制,姿态环控制,EKF,各个传感器的驱动。 结合《一本书看懂多旋翼》这本书来看 这么来看其实PX4代码也不复杂,
MATLAB/Simulink仿真平台,蓄电池控制 包括蓄电池双向DC/DC控制,采用电压外环电流内环控制
MATLAB/Simulink仿真平台,蓄电池控制 包括蓄电池双向DC/DC控制,采用电压外环电流内环控制,使输出电压稳定,也可采用功率外环电流内环控制,使输出功率稳定 ID:6550651179458582波心当冷月无声
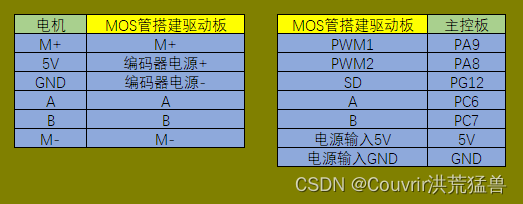
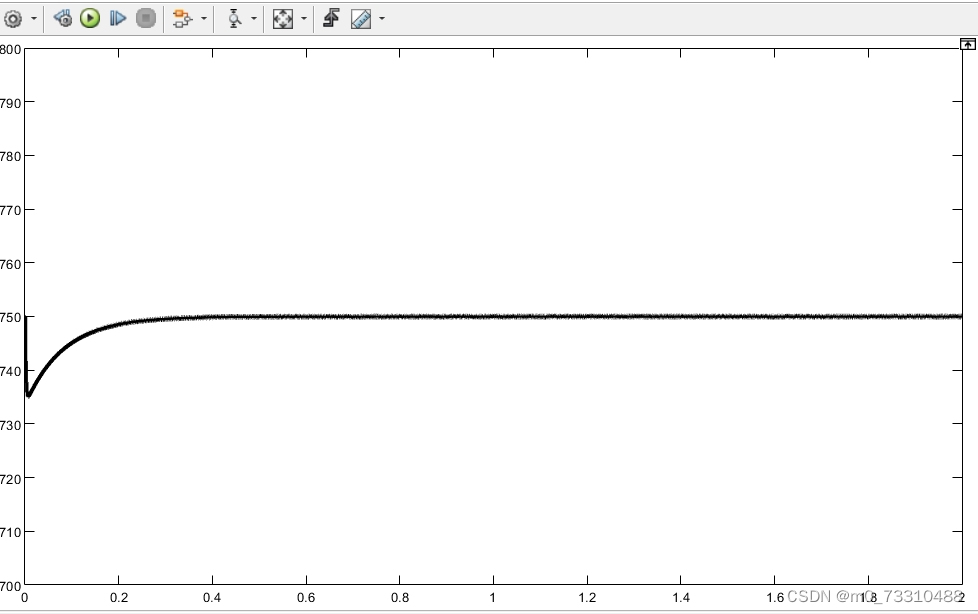
电机应用开发-直流有刷电机速度环控制实现
直流有刷电机速度环控制实现 硬件设计 可选:L298N电机驱动板、野火MOS搭建的驱动板。 直流电机速度环控制-位置式PID实现 编程要点 配置定时器可以输出PWM控制电机 配置定时器可以读取编码器的计数值 配置基本定时器可以产生定时中断来执行PID运算 编写位置式PID算法 编写速度控制函数 增加上位机曲线观察相关代码 编写按键控制代码
