海鞘专题

【智能算法改进】路径规划问题的多策略改进樽海鞘群算法研究
目录 1.算法原理2.改进点3.结果展示4.参考文献5.代码获取 1.算法原理 【智能算法】樽海鞘群算法(SSA)原理及实现 2.改进点 无标度网络策略 复杂网络在图论中可以用边和节点表示, Barabasi 等于1999年通过分析大量的数据提出了无标度网络模型. 该网络的度分布满足幂律分布, 这种网络结构已经在现实的世界中得到证明,如互联网、大脑神经系统网络和生物网

多目标应用:MSSA多目标樽海鞘优化算法求解无人机三维路径规划(MATLAB代码)
一、无人机多目标优化模型 无人机三维路径规划是无人机在执行任务过程中的非常关键的环节,无人机三维路径规划的主要目的是在满足任务需求和自主飞行约束的基础上,计算出发点和目标点之间的最佳航路。 1.1路径成本 无人机三维路径规划的首要目标是寻找起飞点和目标点之间最短路程的飞行路径方案。一般地,记无人机的飞行路径点为 W i j = ( x i j , y i j , z i j ) W_{i j
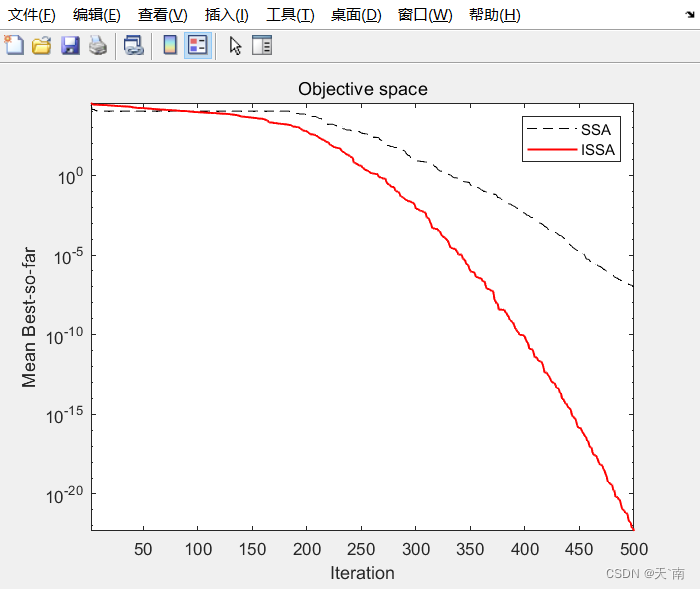
【群智能算法】一种改进的樽海鞘算法ISSA【Matlab代码#3】
文章目录 【`获取资源`请见文章第5节:资源获取】1. 基础樽海鞘算法1.1 种群初始化1.2 领导者位置更新1.3 追随者位置更新 2. 改进的樽海鞘算法2.1 改进Tent映射的种群初始化2.2 领导者位置更新改进策略2.3 追随者位置更新改进策略 3. 部分代码展示4. 结果展示5. 资源获取 【获取资源请见文章第5节:资源获取】 1. 基础樽海鞘算法 樽海
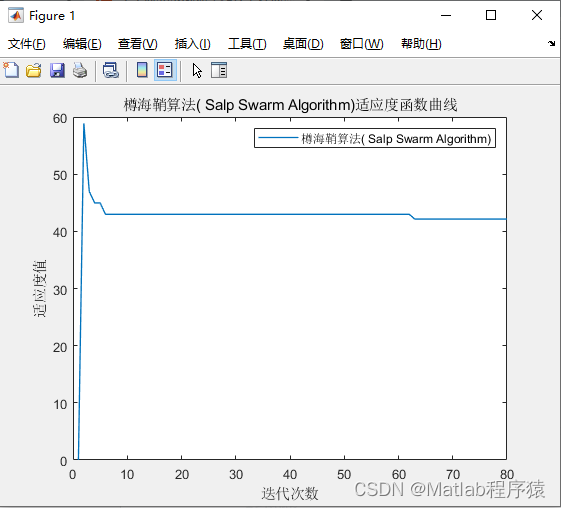
【MATLAB源码-第126期】基于matlab的樽海鞘算法(SSA)机器人栅格路径规划,输出做短路径图和适应度曲线。
操作环境: MATLAB 2022a 1、算法描述 樽海鞘算法(Salp Swarm Algorithm, SSA) 樽海鞘算法是一种基于群体智能的优化算法,它通过模拟樽海鞘在海洋中的社会行为来解决优化问题。这种算法的设计灵感来源于樽海鞘的群体行为,尤其是它们在觅食时的协同行动方式。 背景 樽海鞘是一类海洋生物,属于脊索动物门。它们以群体的形式生活在海洋中,通过协调的方式进行觅食和移动。在

樽海鞘优化算法寻找函数最小值问题的python示例实现
樽海鞘优化算法(Sea Cucumber Optimization Algorithm,简称SCO)是一种基于自然界樽海鞘行为的启发式优化算法。它模拟了樽海鞘在寻找食物和逃避危险时的行为策略,通过优化问题的搜索过程来寻找最优解。 樽海鞘优化算法的基本思想是将问题空间看作是一个海洋环境,其中包含了多个樽海鞘个体。每个樽海鞘个体都有自己的位置和适应度值,代表了其在问题空间中的解和解的质量。算法通过模

基于樽海鞘群算法的无人机航迹规划-附代码
基于樽海鞘群算法的无人机航迹规划 文章目录 基于樽海鞘群算法的无人机航迹规划1.樽海鞘群搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用樽海鞘群算法来优化无人机航迹规划。 1.樽海鞘群搜索算法 樽海鞘群算法原理请参考:https://blog.csdn.net/u011