测速专题

YOLOv8/v10+DeepSORT多目标车辆跟踪(车辆检测/跟踪/车辆计数/测速/禁停区域/绘制进出线/绘制禁停区域/车道车辆统计)
01:YOLOv8 + DeepSort 车辆跟踪 该项目利用YOLOv8作为目标检测模型,DeepSort用于多目标跟踪。YOLOv8负责从视频帧中检测出车辆的位置,而DeepSort则负责关联这些检测结果,从而实现车辆的持续跟踪。这种组合使得系统能够在视频流中准确地识别并跟随特定车辆。 02:YOLOv8 + DeepSort 车辆跟踪 + 任意绘制进出线 在此基础上增加了用户

【OpenWrt(3)】内网搭建iperf3测速服务器
下载的iperf3 网站:https://iperf.fr/iperf-download.php Window地址:https://github.com/ar51an/iperf3-win-builds 安卓:https://gitee.com/hiyanyx/magic-i-perf 文章目录 下载的iperf3Windows 服务器启动安卓客户端启动参考 Windows 服

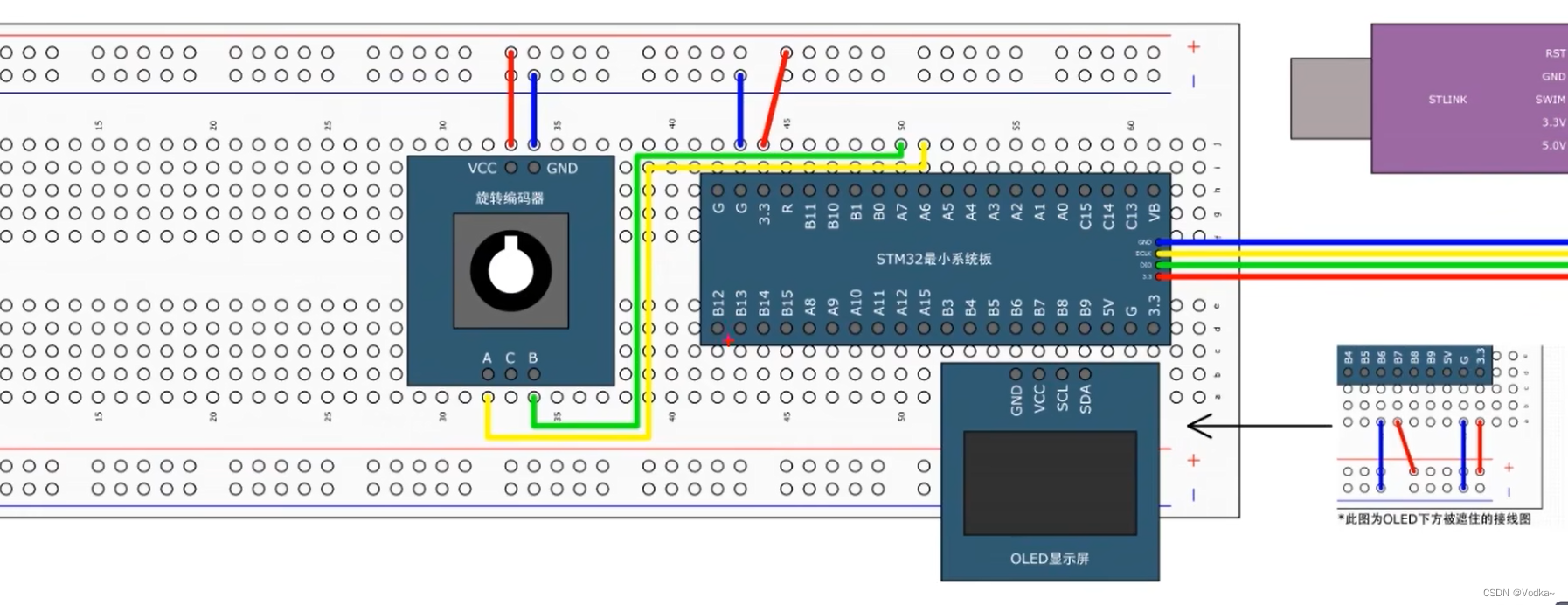
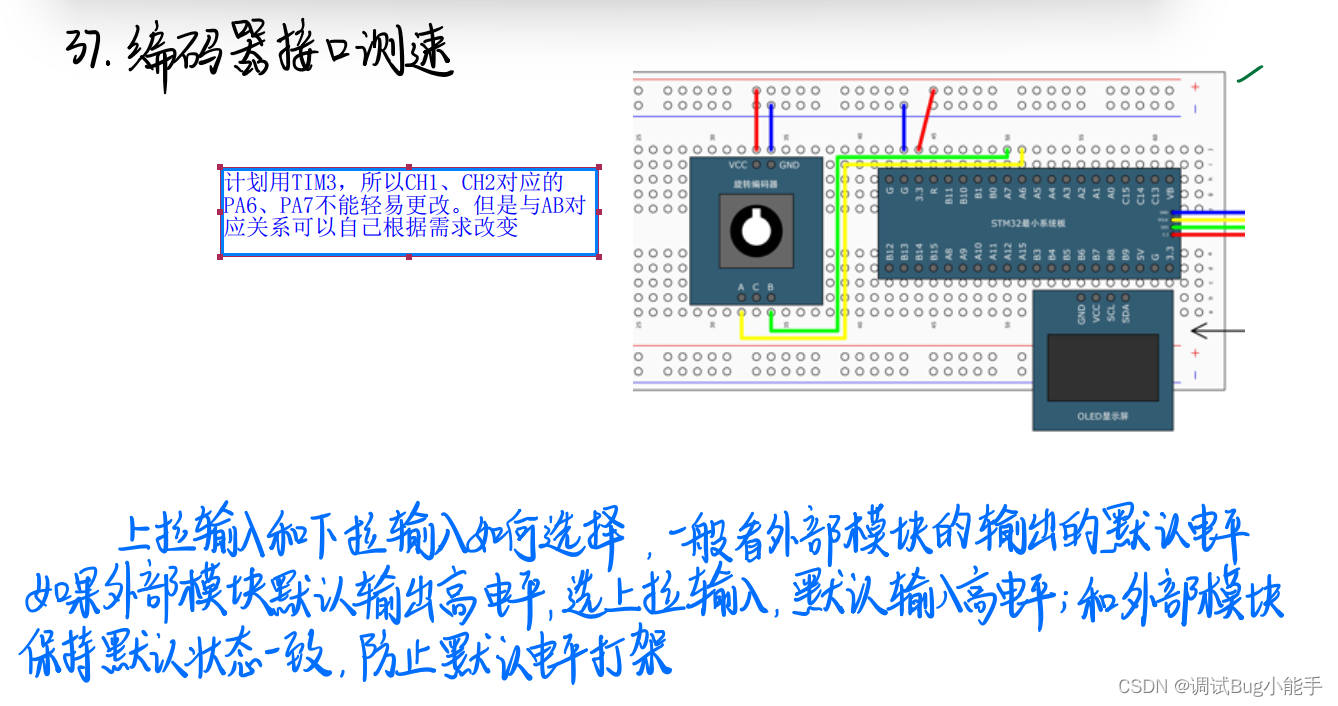
07:【江科大stm32】:编码器通过定时器测速
编码器通过定时器测速 编码器的转动方向不同,则输出波形的相位也不同。如下图所示: 编码器标准库的编程接口: ①Encoder.c文件的代码如下: #include "stm32f10x.h" // Device header//使用PA6(TIM3_CH1)和PA7(TIM3_CH2)进行编码器的输入void Encoder_Init(

电信500M宽带+AX210无线网卡测速
500M电信宽带,PC的Wifi模块是AX210 一、PC测速 2.4G Wifi 5G Wifi 有线网口 二、 手机端,小翼管家App测速 2.4G Wifi 5G Wifi 结论: 手机上网要快的话,还是要选择5G wifi

基于OpenCV+MFC的KCF测速软件
基于OpenCV+MFC的KCF测速软件 引言原理介绍使用介绍(1)主界面(2)打开视频(3)点击KCF测速(4)框选待检测目标(5)测速结果 资源链接(包含源码) 引言 还记得刚上研二那会儿,导师突发奇想让我做乒乓球拍的性能测试,想着这个要是弄好了的话就给我做毕业课题(哈哈最后还是换了另外的课题),这个当时调研了一番,其中关于如何定义乒乓球拍的性能指标比较麻烦,即如何给其定

(章节 3.1) 本地运行 AI 有多慢 ? 大模型推理测速 (llama.cpp, Intel GPU A770)
由于本文太长, 分开发布, 方便阅读. 3.1 CPU (i5-6200U, 2C/4T/2.8GHz) x86_64 AVX2 在 4 号 PC (物理机) 上运行. 版本: > ./llama-b3617-bin-ubuntu-x64/build/bin/llama-cli --versionversion: 3617 (a07c32ea)built with cc (Ubunt

基于51单片机设计的简易直流电机调测速系统(可用在普中开发板)——程序源码设计文档演示视频等(文末工程资料下载)
基于51单片机设计的简易直流电机调测速系统 演示视频 基于51单片机设计的简易直流电机调测速系统(可用在普中开发板) 功能任务描述:将设置的转速与当前测量的转速比较,得出差值用于控制DAC0832的输出电压,从而控制直流电机的转速,使转速逐渐达到设置转速。在LED上显示设置转速(左2位LED)和当前转速(右2位LED),转速显示采用十进制。控制过程中,当前转速显示不断变化。*直流电机

企业UDP文件传输工具测速的方式(下)
在前一篇文章中,我们深入讨论了UDP传输的基本概念和镭速UDP文件传输工具如何使用命令行快速进行速度测试。现在,让我们进一步探索更为高级和灵活的方法,即通过整合镭速UDP的动态或静态库来实现网络速度的测量,以及如何利用这一过程更精确地评估网络状况,为大型文件的传输提供坚实的技术支持。 集成镭速UDP库进行测速 步骤一:获取镭速UDP库 首先,需要下载镭速(私有化部署方案,也可接入公有
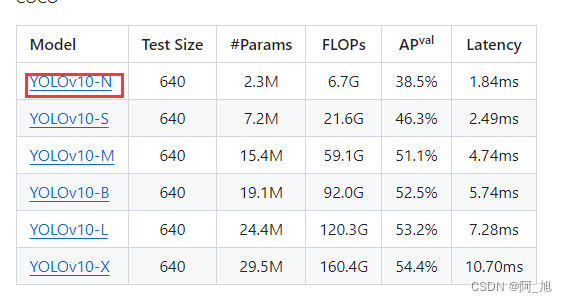
实战 | 基于YOLOv10的车辆追踪与测速实战【附源码+步骤详解】
《博主简介》 小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。 ✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~ 👍感谢小伙伴们点赞、关注! 《------往期经典推荐------》 一、AI应用软件开发实战专栏【链接】 项目名称项目名称1.【人脸识别与管理系统开发】2.【车牌识别与自动收费管理系统开发】3.【手势识
TIM时钟中断——输出捕获、输入捕获、编码器接口测速
输出捕获 通道与DMA 计算机中的通道是一种专用于输入/输出(I/O)操作的控制器,它充当了主机(包括CPU和内存)与外部设备之间数据传输的桥梁。通道的主要目的是提高系统的并行处理能力,允许CPU与I/O设备同时工作,从而提升整体效率。 通道的基本特点和功能: 独立性:通道是一个相对独立的处理单元,拥有自己的指令集(通道指令),可以独立于CPU执行I/O操作。这意味着CPU可以启动通道后

编码电机脉冲数统计,测速
脉冲统计代码 int reducation = 90;//减速比,根据电机参数设置,比如 15 | 30 | 60int pulse = 11; //编码器旋转一圈产生的脉冲数该值需要参考商家电机参数int per_round = pulse * reducation * 4;//车轮旋转一圈产生的脉冲数 long start_time = millis();//一个计算周期的开始时刻,
使用YOLOv8 YOLOv5 进行距离测量,速度测量。使用目标检测进行测距,测速是如何实现的呢?
文章大纲 简介差帧算法(Frame Difference Algorithm) 目标检测测距使用YOLOv8 进行测距代码样例代码原理 目标检测测速使用YOLOv8 进行测速代码原理 参考文献综述 简介 导读 在精确检测车速车距的方案中,视觉方案是非常具有挑战性的,但由于没有昂贵的距离传感器而大幅降低成本,所以潜力巨大。本文综述了基于视觉的车辆速度、距离估计。并建立了
汇川AM400PLC编码器转速测量功能块(M法测速)
M法测速的原理和相关代码,大家可以参考相关专栏文章,常用链接如下: 1、编码器M法测速仿真 编码器M法测速仿真(Simulink)_mt法测速 simulink-CSDN博客文章浏览阅读2k次。编码器M法和T法测速的详细讲解可以参看下面的文章链接,这里不再赘述,这里主要介绍Simulink里建模仿真,带大家从另一个角度理解编码器测速原理。PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST

10个免费的网站测速工具
没有哪个网站能像 Google。是的,不管是网站规模还是在浏览器中载入的速度都无法与之相比。精简主义是好的,但是不适合在网页上放置内容和动画广告。这是Web设计师有时候不得不权衡再三的问题。 1. WebWait 界面上的跑表可以显示你的网站平均载入时间。输入站点地址,设置运行次数,完成之后得到平均值、中间值以及标准差等。你可以设置运行的次数,运行测试时,会考虑所有的图片、样式和 JS 等因素
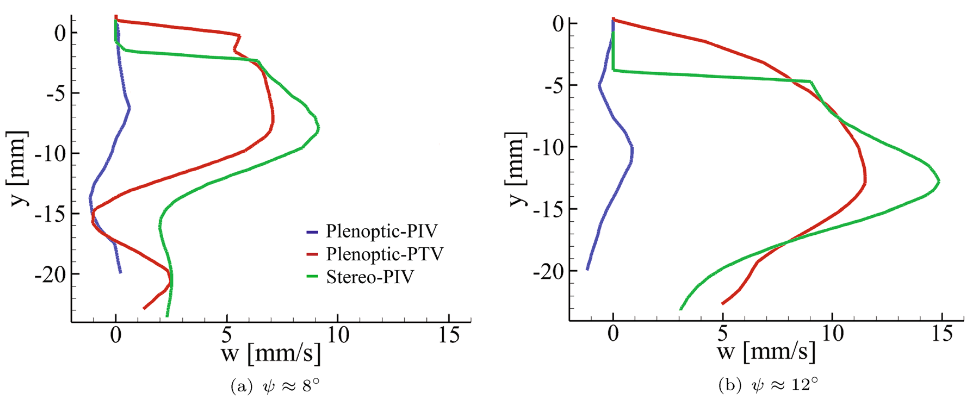
【研究】光场相机测速技术中景深方向不确定性的改进方法
本项研究详细介绍了一种基于光场相机的粒子追踪测速(PTV)算法,旨在对三维速度场的三分量进行精细化测量。算法核心在于利用相机视角的多样性,辅以三角化测量和粒子追踪技术,有效优化了光场粒子图像测速(PIV)实验中常见的景深方向不确定性难题。 首先采用Light Field Ray Bundling(LFRB)技术进行三维位置评估,框架如图1所示,通过图像数据与物理空间的映射函数将粒子光线投影至测量
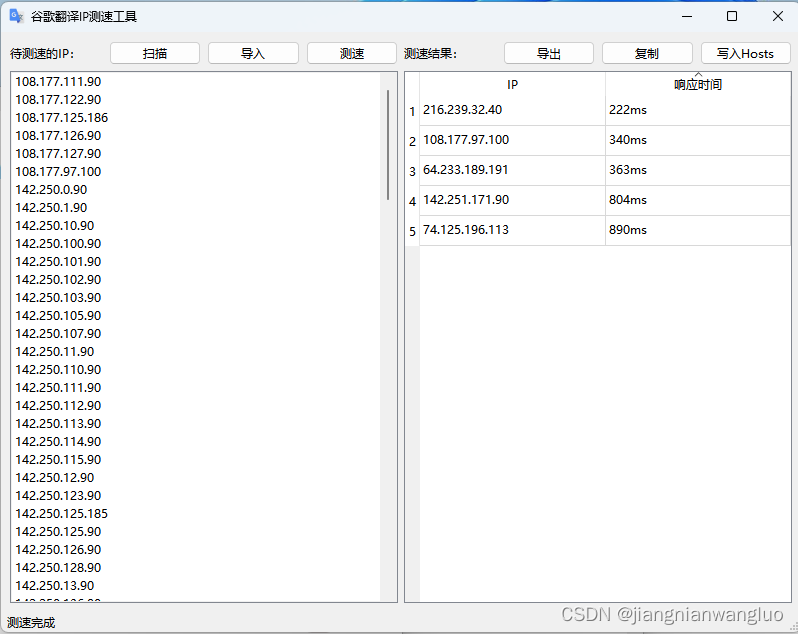
谷歌可用ip扫描与测速 解决谷歌浏览器、开发插件翻译问题
之前出过一期改hosts文件解决开发软件翻译插件失效问题,之前就有看到全球最大男性同好网站github上有个非常好用的软件 GoogleTranslate_IPFinder ,一直忘了分享,这回在公司又需要翻译所以才想起来,先分享一下,有时间在搞个国内网盘。 下面就是直接复制的作者的介绍,hosts配置翻我以前的文章说的很清楚 http://t.csdn.cn/XwCtJ #

iperf3测速,设置开发板ip常用方法
iperf3 iperf3是用于执行网络吞吐量测量的工具,可以测试TCP、UDP或SCTP的吞吐量。 要执行iperf3测试,用户必须同时建立服务器和客户端 服务端: iperf3 -s 服务器启动后,它将侦听来自iperf3客户端的连接。默认情况下,iperf3服务器通过TCP端口5201侦听来自iperf3客户端的连接;也可以使用-p选项指定自定义端口,例如: iperf3

YOLOv8+DeepSort/ByteTrack-PyQt-GUI / yolov5 deepsort 行人/车辆(检测 +计数+跟踪+测距+测速)
YoloV8结合可视化界面和GUI,实现了交互式目标检测与跟踪,为用户提供了一体化的视觉分析解决方案。通过YoloV8算法,该系统能够高效准确地检测各类目标,并实时跟踪它们的运动轨迹。 用户可以通过直观的可视化界面进行操作,实现目标检测与跟踪的交互式体验。GUI的设计使得用户可以轻松选择不同的参数设置,调整算法运行方式,以满足不同场景下的需求。 这一集成系统的优势在于其简单易用性和高效性。用户

利用Python创建Kalman滤波器用于多普勒测速目标跟踪
利用Python构造Kalman滤波器和拓展卡尔曼滤波器Class用于目标跟踪 文章目录 利用Python构造Kalman滤波器和拓展卡尔曼滤波器Class用于目标跟踪Kalman滤波概述Kalman滤波器Python类线性动力学、线性观测所有代码 Kalman滤波概述 其基本思路是: 新的最佳估计基于原最佳估计和已知外部影响校正后得到的预测。新的不确定性基于原不确定性和

两个随身wifi测速对比,高通410随身WiFi网速评测
一个小小的随身wifi,竟然越来越精彩了,真是没想到啊,作为一个恰好全程参与的吃瓜群众,先发下昨天说的测速,再来八下这次的事儿把 平时有个双不限的卡放烽火的4G路由器里当宽带用,然后十一期间需要出门用急需一个随身wifi,当时光想着买能插SIM卡的了,搜了一圈最后PDD上斥巨资花76买了一个所谓的全网通插卡版 买完后大概9号 12号左右,又看到了网上爆料的30元和13元随身wifi,虽然卖家
TIM编码器接口(编码器测速)
定时器编码器接口自动计次--------->对应手册14.3.12编码器接口模式 应用场景: 电机控制PWM驱动电机,编码器测电机速度,PID算法闭环控制 -----------------------------------------------------------------------------------------------------------------------
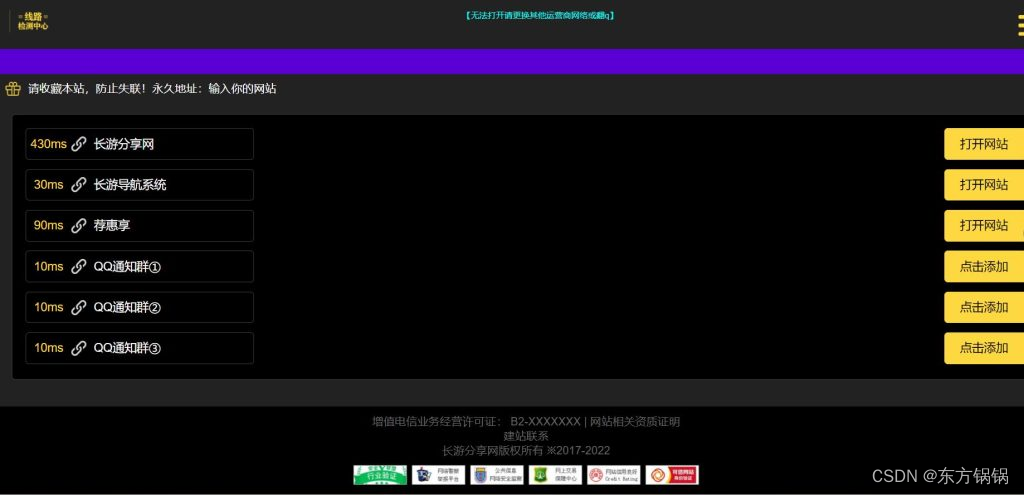
H5 带网站测速引导页源码
H5 带网站测速引导页源码 源码介绍:一款带网站测速功能的引导页源码 下载地址: https://www.changyouzuhao.cn/10717.html

计算机视觉实战项目4(单目测距与测速+摔倒检测+目标检测+目标跟踪+姿态识别+车道线识别+车牌识别+无人机检测+A_路径规划+行人车辆计数+动物识别等)
基于YOLOv5的无人机视频检测与计数系统 摘要: 无人机技术的快速发展和广泛应用给社会带来了巨大的便利,但也带来了一系列的安全隐患。为了实现对无人机的有效管理和监控,本文提出了一种基于YOLOv5的无人机视频检测与计数系统。该系统通过使用YOLOv5目标检测算法,能够准确地检测无人机,并实时计数其数量,提供给用户可视化的监控界面。 原文链接:https://blog.csdn.net
php speedtest,CentOS下使用speedtest.net测速
先来个一键脚本 wget -O speedtest-cli https://raw.githubusercontent.com/sivel/speedtest-cli/master/speedtest.py --no-check-certificate chmod +x speedtest-cli ./speedtest-cli or curl -Lo speedtest-cli https:/
掌上单片机实验室 – 低分辨率编码器测速方式完善(24)
一、背景 本以为“掌上单片机实验室”这一主题已告一段落,可最近在测试一批新做的“轮式驱动单元”时,发现原来的测速算法存在问题。 起因是:由于轮式驱动单元的连线较长,PCB体积也小,导致脉冲信号有干扰,加之脉冲周期正好和定时器溢出的周期相近,使得很多产品在测试过程中,PID调速不成功。先是怀疑硬件焊接存在问题,可连接示波器监测脉冲信号后发现,输出的脉冲是正确的,推