本文主要是介绍TIM编码器接口(编码器测速),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
定时器编码器接口自动计次--------->对应手册14.3.12编码器接口模式
应用场景:
电机控制PWM驱动电机,编码器测电机速度,PID算法闭环控制
---------------------------------------------------------------------------------------------------------------------------------
一、结构分析

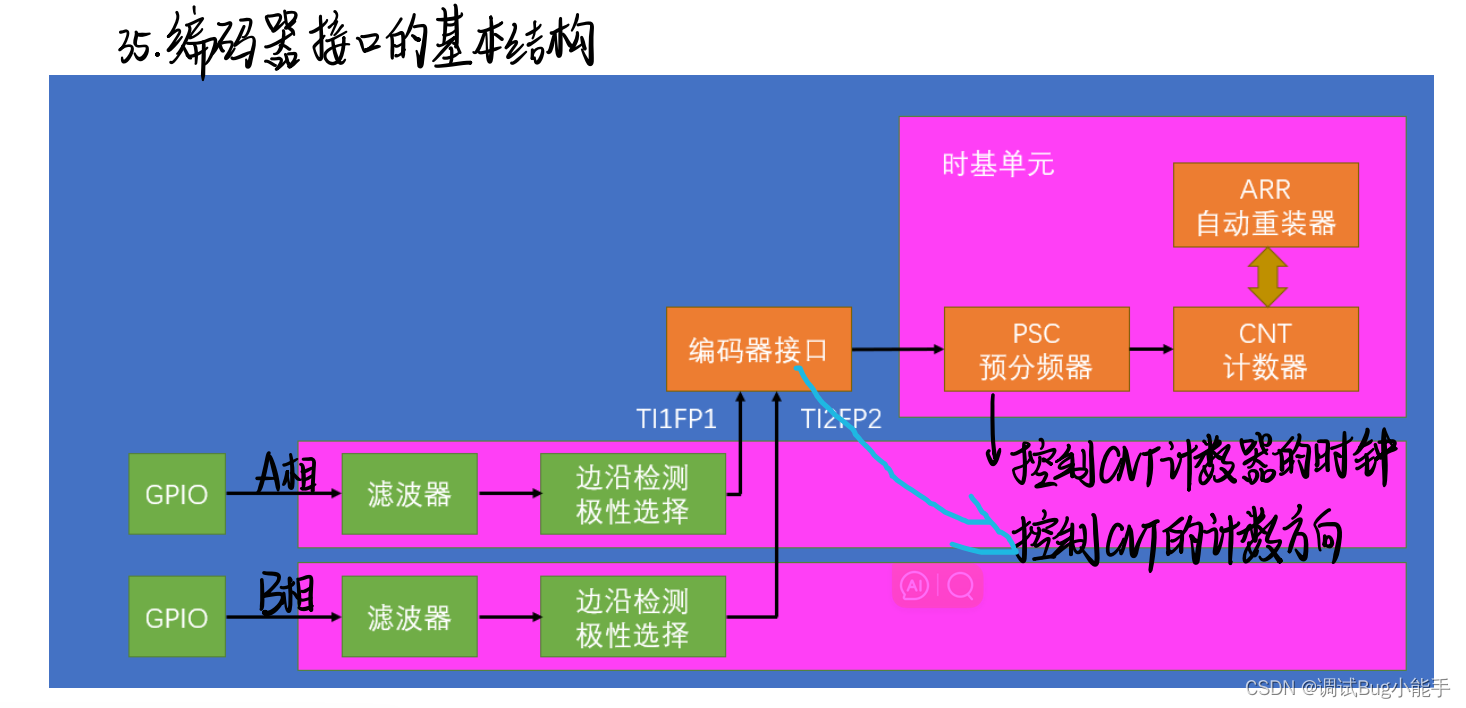
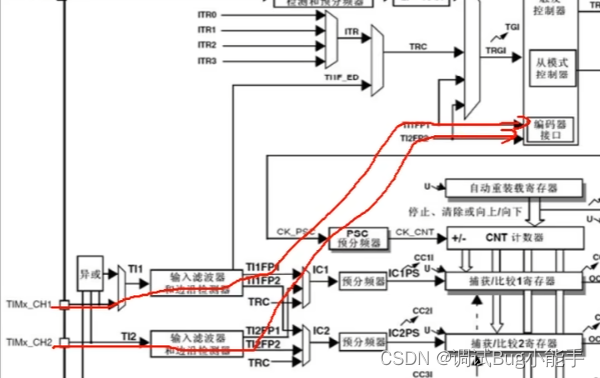
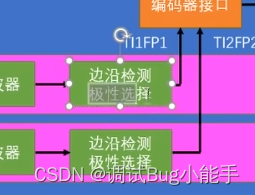
*输入 :CH1/CH2 -->边沿检测-->编码器接口
*输出:控制CNT计数时钟和计数方向
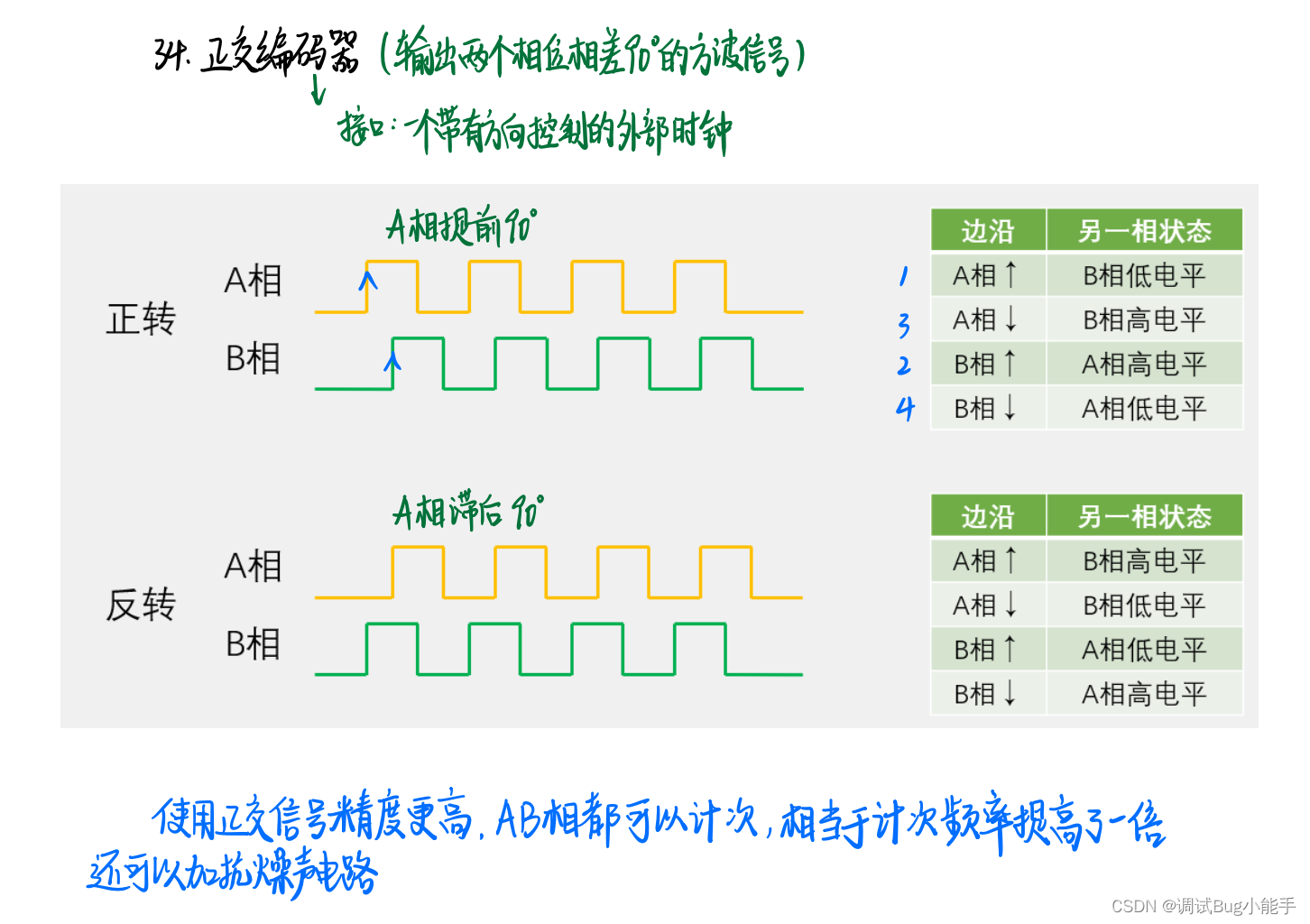
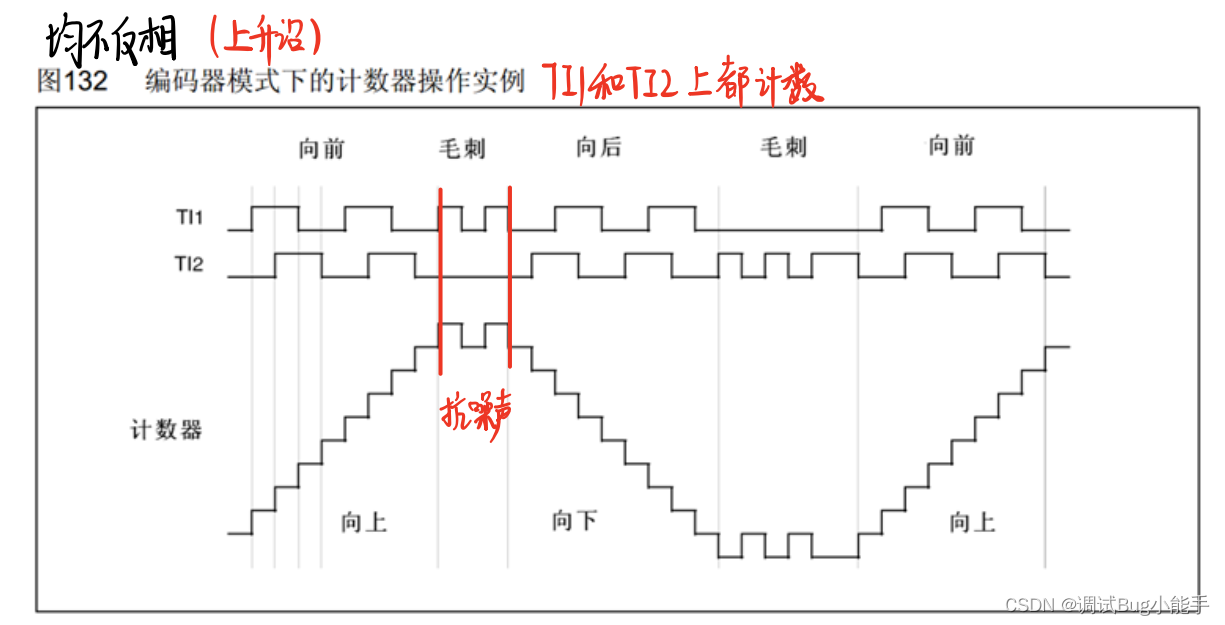
逻辑:A相边沿检测+B相状态 =CNT增/减
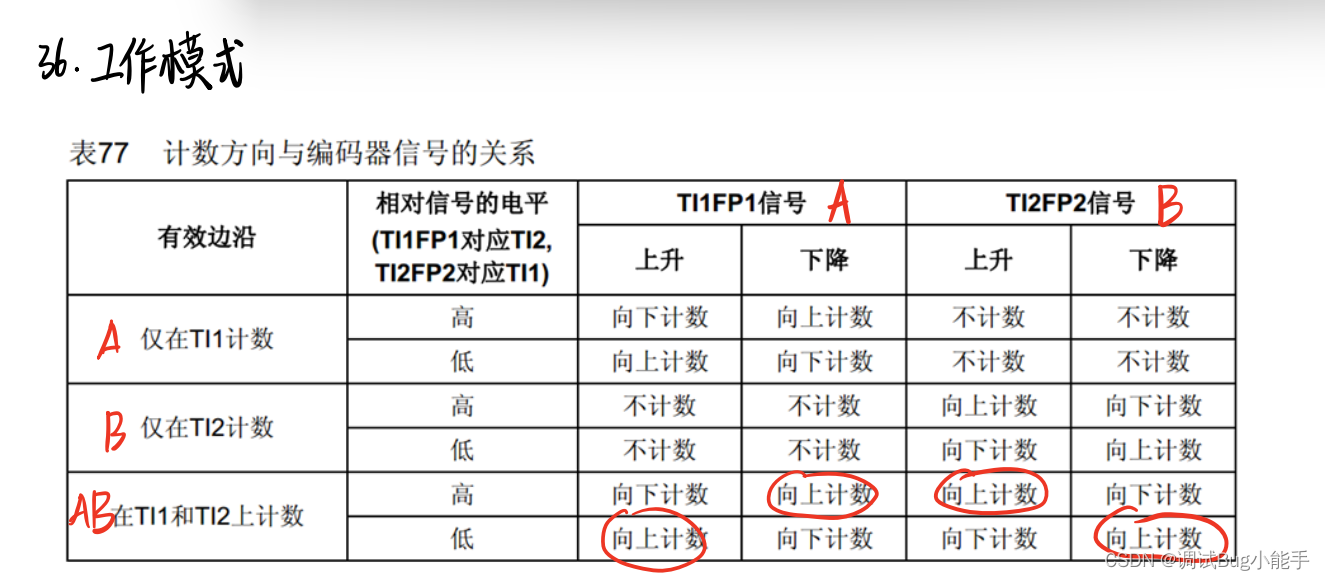
正转向上计数,反转都向下计数
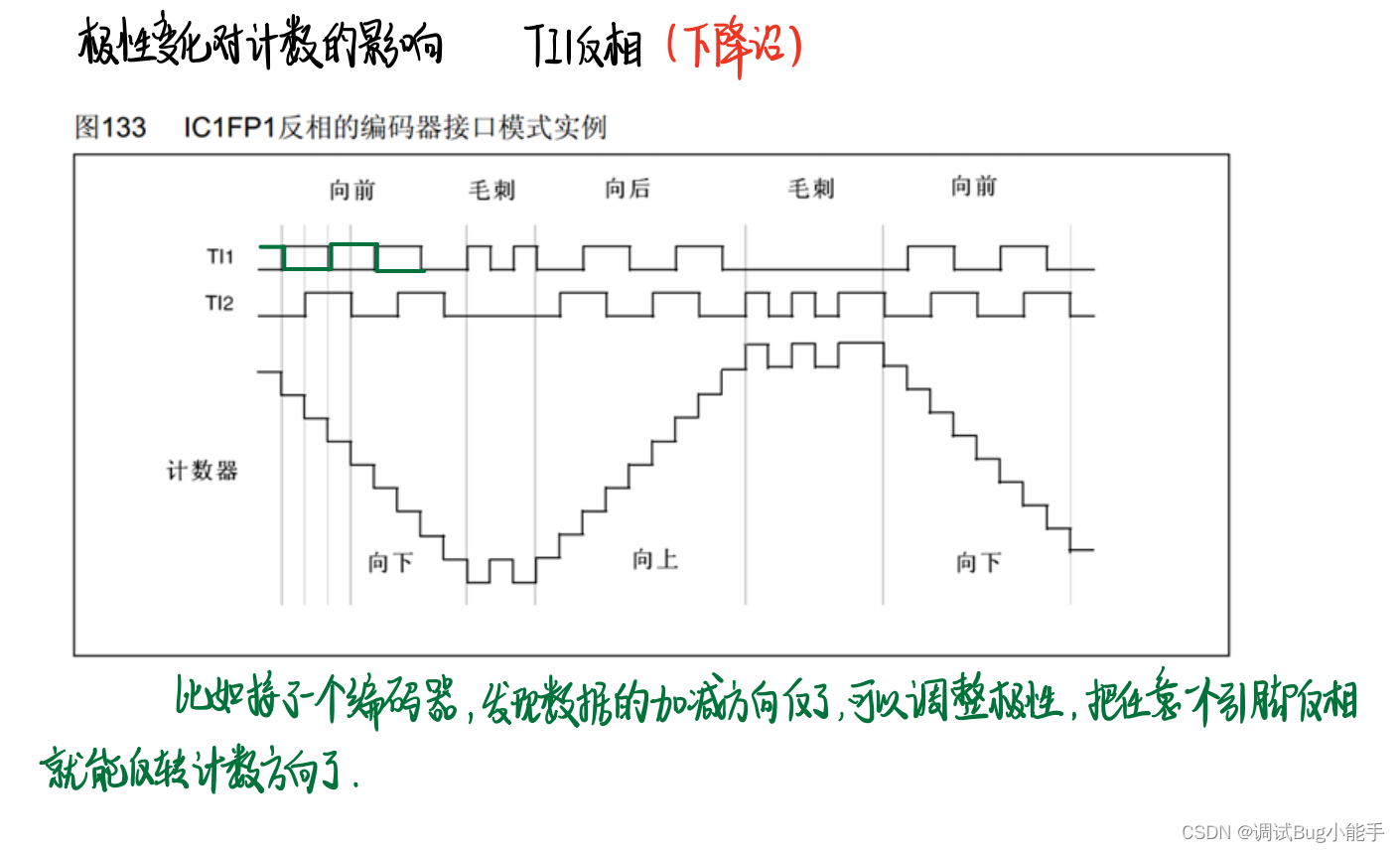
解释反相:
 输入捕获那里,极性选择决定上升沿有效还是下降沿有效;但是这里我们知道上升沿下降沿都有用,这里就不是边沿的极性选择,是高低电平极性选择
输入捕获那里,极性选择决定上升沿有效还是下降沿有效;但是这里我们知道上升沿下降沿都有用,这里就不是边沿的极性选择,是高低电平极性选择
选择上升沿参数,高低电平极性不反转;选择下降沿参数,经过一个非门,高低电平反转
二、编码器测位代码分析
新函数学习:
/*****定时器编码器接口配置*****/
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);
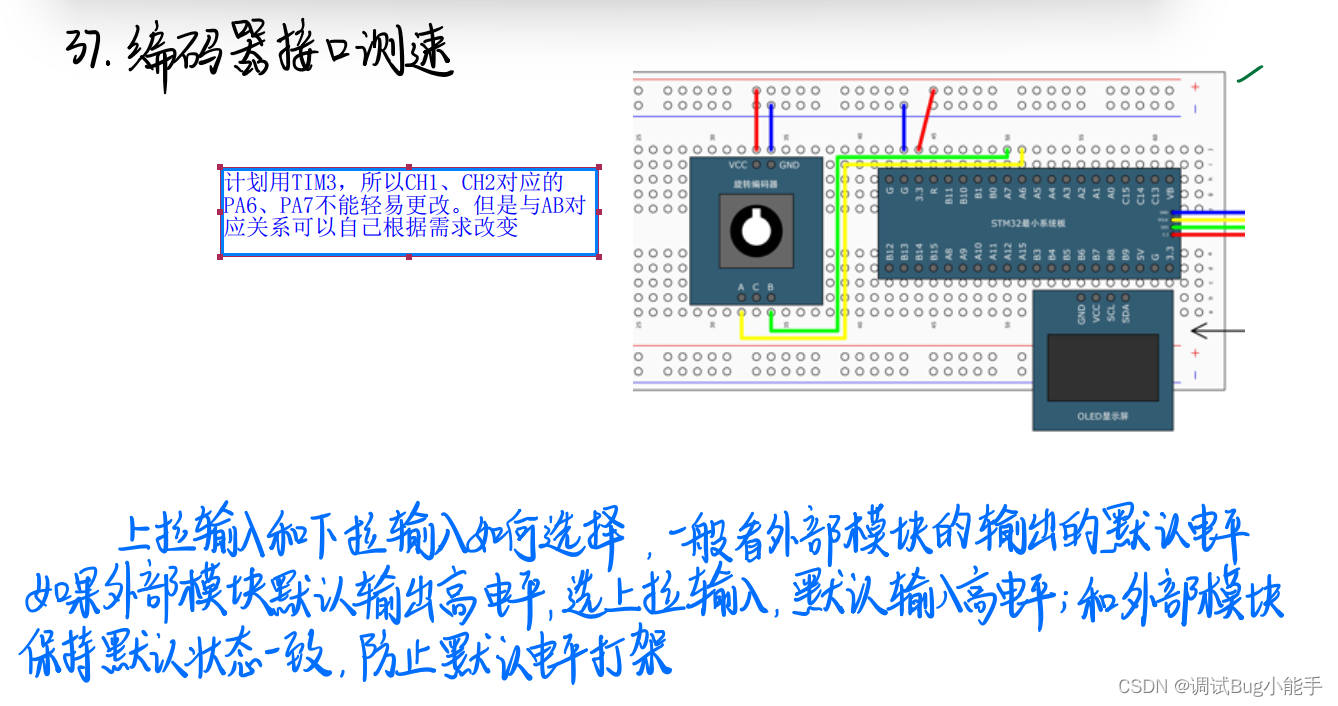
STEP1 RCC开启时钟
STEP2 配置GPIO为输入模式
STEP3 配置时基单元:PSC不分频,ARR 65535,CNT执行计数
STEP4 输入捕获单元:滤波器、极性
STEP5 配置编码器接口模式:调用库函数
STEP6 TIM_Cmd
ENCODER.C
#include "stm32f10x.h" // Device header
void Encoder_Init(void)
{/*****STEP1 开启时钟*****/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);/*****STEP2 配置GPIO*****/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);/*****STEP3 配置时基单元*****/ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision =TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode =TIM_CounterMode_Up ;TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1;//ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1 ;//PSC 不分频TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);/*****STEP 4 输入捕获配置*****/TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);//赋一个初始值TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //高低电平极性不反转,不反相,后面配置过了/*TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //分频器 目前TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; */ //配置数据选择器 无用TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //高低电平极性不反转,不反相TIM_ICInit(TIM3,&TIM_ICInitStructure);/*****STEP 5 配置编码器接口*****/TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);/*****STEP 6 定时器使能*****/TIM_Cmd(TIM3,ENABLE);
}int16_t Encoder_Get(void)
{return TIM_GetCounter(TIM3);}
实现反转负数(补码原理):int16_t 如果用uint16_t 就是65535递减
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"int main(void)
{OLED_Init();Encoder_Init();OLED_ShowString(1,1,"CNT:");while(1){OLED_ShowSignedNum(1,5,Encoder_Get(),5);}}目前向右转增,向左减,若不是想要的增减方向,更改极性
更改极性
硬件:AB相接线换一下
软件:修改输入通道的极性,把任意一个极性反转一下
三、编码器测速代码分析
固定的闸门时间读一次CNT再清零
MAIN.C
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"int16_t Speed;int main(void)
{OLED_Init();Timer_Init(); Encoder_Init();OLED_ShowString(1,1,"CNT:");while(1){OLED_ShowSignedNum(1,7,Speed,5);}}void TIM2_IRQHandler(void)//减少使用DELAY
{if (TIM_GetITStatus(TIM2,TIM_IT_Update)==SET){Speed = Encoder_Get();TIM_ClearITPendingBit(TIM2,TIM_IT_Update);}
} ENCODER 改动部分:
int16_t Encoder_Get(void)
{int16_t Temp;Temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3,0);return Temp;}
这篇关于TIM编码器接口(编码器测速)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






