波特率专题

linux下非标准波特率的设置和使用
通常,在linux下面,设置串口使用终端IO的相关函数设置,如tcsetattr等函数,linux内部有一个对常用波特率列表的索引,根据设置的波特率用底层驱动来设置异步通信芯片的寄存器 对于非标准的任意波特率需要用ioctl(fd, TIOCGSERIAL, p)和ioctl(fd, TIOCSSERIAL, p)的配合,ioctl的最后一个参数是struct serial_struct *

关于示波器测波特率的方法
转载于:https://blog.csdn.net/lianxue1986/article/details/50385384 下面说一下示波器测波特率的方法步骤: 显示高低跳变的情况: 1.先把示波器表笔的地线(夹子)夹485B,表笔夹485A。 2.往串口发送数据:如发送0x55或0xAA(因为这两个值都是0和1相间的,容易看波形占用的时间值),本例是发送的0xAA。 3.打开示波

CAN通信之波特率相关配置
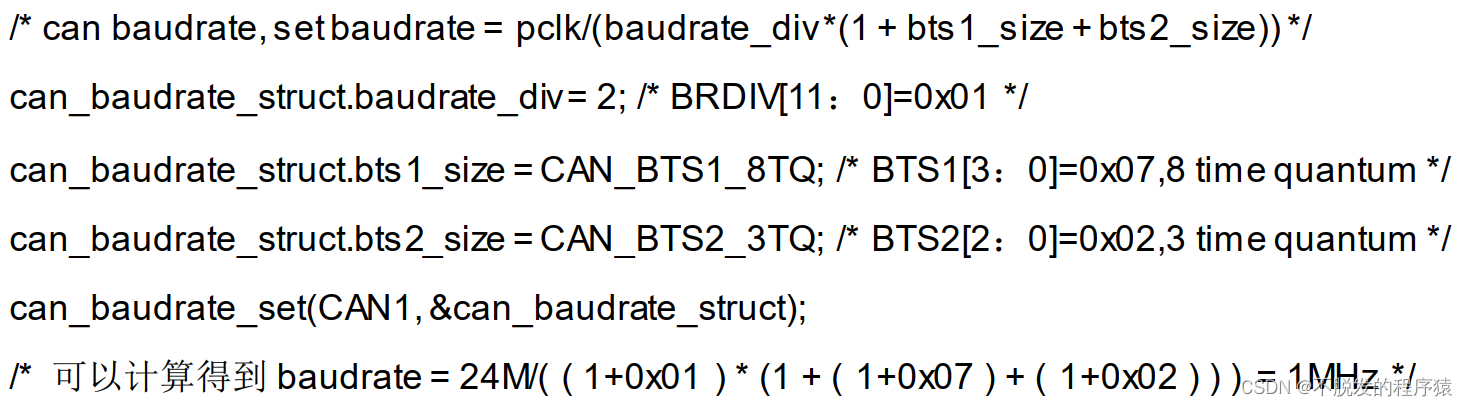
由于 CAN 属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯。 首先我们要明确几个概念: 波特率:can 1s传输的位数,其单位为bps。 Time-quantum(简称TQ):意思是一个时钟周期(1/时钟周期),1位数据由若干个TQ组成。 波特率的计算公式为,CAN波特率 = APB总线频率/BR
谁说串口通信波特率越高越好?
在电子世界里,串口通信就像是电子设备之间的“悄悄话”,它们通过串行数据传输来交换信息。但你知道吗?串口通信的波特率并不是越高越好,这事儿得好好聊聊。 1.什么是串口通信? 串口通信,就像它的名字一样,是一种串行的数据传输方式。它允许设备通过一根线(或几根线)来传递信息。想象一下,你通过一根绳子传递小纸条给朋友,这就是串口通信的基本概念。 2.串口通信波特率是什么?

STM32F207 USART2 波特率设置9600以下,4800、2400发送报文乱码
最近有一个老项目有新的需求,需要对串口进行一下改造,波特率从原来的9600改到了2400,结果奇葩的事情发生了,之前一直好好的串口,发送出来的报文竟然变成了乱码,代码也就修改了一下波特率,其他的什么都没有修改。百思不得其解,网上查阅资料说是时钟频率的问题,降低一点就解决了。但是我仔细检查过代码确认不是这个原因导致的,而且另外一个串口USART3 波特率设置成2400是能够正常收发报文的。两
Arduino-ESP32的CAN波特率设置为1M代码,不用改底层。
前面调CAN的时候,发现CAN的实际的波特率是设置的波特率的一半。然后还去看手册,推公式,改底层库的代码。后面发现不用这么麻烦,换一下使用的库和配置函数就行。使用CAN.h头文件的配置函数就会出现CAN的实际的波特率是设置的波特率的一半这个问题。 使用CAN.h头文件包含的库的函数配置,CAN实际波特率是配置波特率的一半 #include <CAN.h>#define CAN_TX

【i.MX6UL开发常见问题】如何添加其他的串口波特率?
4.10 如何添加其他的串口波特率? 答:添加路径内核源代码/driver/tty/serial/serial_core.c。 参考如下: ……… static const struct baud_rates baud_rates[] = { { 921600, B921600 }, { 460800, B460800 }, { 230400, B230400 },

stm32支持的波特率的问题
原来学习stm32,关于串口波特率这个问题没有怎么关注,一般也就习惯用9600或者115200,今天被问到:stm32支持的最大波特率为多少?我自己也语塞了... 为此我好好看了下相关资料。 首先查看了stm32f10x参考手册.pdf,其中关于USART部分提到了USART的最高传输速度为4.5Mbit/s,图片(图1)如下: 在找到了最大的传输速度后,就要考虑为什
【Linux】CAN根据时钟频率、波特率计算采样点详解
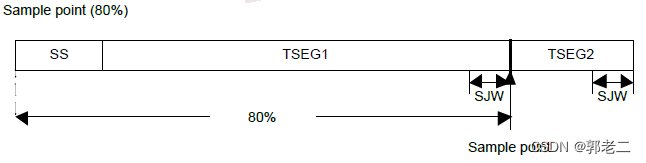
1、采样点知识回顾 参考博客:【CAN】知识点:帧类型、数据帧结构、传输速率、位时间、采样点 CAN 采样点是指在一个数据位的传输周期内,接收器实际采样数据的时间点。这个时间点是以百分比来表示的,它决定了在数据位的传输周期中,何时读取数据位的值。 正确设置采样点对于确保在不同节点间的数据同步和减少误差非常重要。 数据同步:在 CAN 网络中,所有节点必须在相同的时间点采样数据,以确保数据的
【网络】通讯名词解释:带宽、速率、波特率、奈奎斯特定律、香农定理
1、带宽 1.1 解释一 带宽,又叫频宽,是数据的传输能力,指单位时间内能够传输的比特数。高带宽意味着高能力。 数字设备中带宽用bps(b/s)表示,即每秒最高可以传输的位数。 模拟设备中带宽用Hz表示,即每秒传送的信号周期数。 通常描述带宽时省略单位,如10M实质是10M b/s。 带宽计算公式为:带宽=时钟频率*总线位数/8。 电子学上的带宽则指电路可以保持稳定工作的频率范围。 1.2
杰发科技AC7840——CAN通信简介(5)_可变波特率设置
0. 简介 设置可变波特率时候,遇到2个坑,在此记录下来 使用该函数即可 can_time_segment_t bitrate2 = s_canBitrate[CAN_BITRATE_250K];CAN_DRV_SetBitrate(instance, &bitrate2); 1. 波特率指针注意不要空 查看设置波特率的接口,发现参数通过指针传进来,于是自己声明了一个指针,参考初始

STM32 CAN的位时序和波特率
STM32 CAN的位时序和波特率 位时序 STM32的CAN外设位时序中只包含3段,分别是同步段SYNC_SEG、位段BS1及位段BS2,采样点位于BS1及BS2段的交界处。其中SYNC_SEG段固定长度为1Tq,而BS1及BS2段可以在位时序寄存器CAN_BTR设置它们的时间长度,它们可以在重新同步期间增长或缩短,该长度SJW也可在位时序寄存器中配置。理解STM32的CAN外设的位时序

MTK_Android9.0修改波特率操作
1.设置 preloader 波特率 alps\vendor\mediatek\proprietary\bootable\bootloader\preloader\custom\k62v1_64_bsp\inc\cus_bldr.h 2.修改Uboot波特率 alps\vendor\mediatek\proprietary\bootable\bootloader\lk\platfor

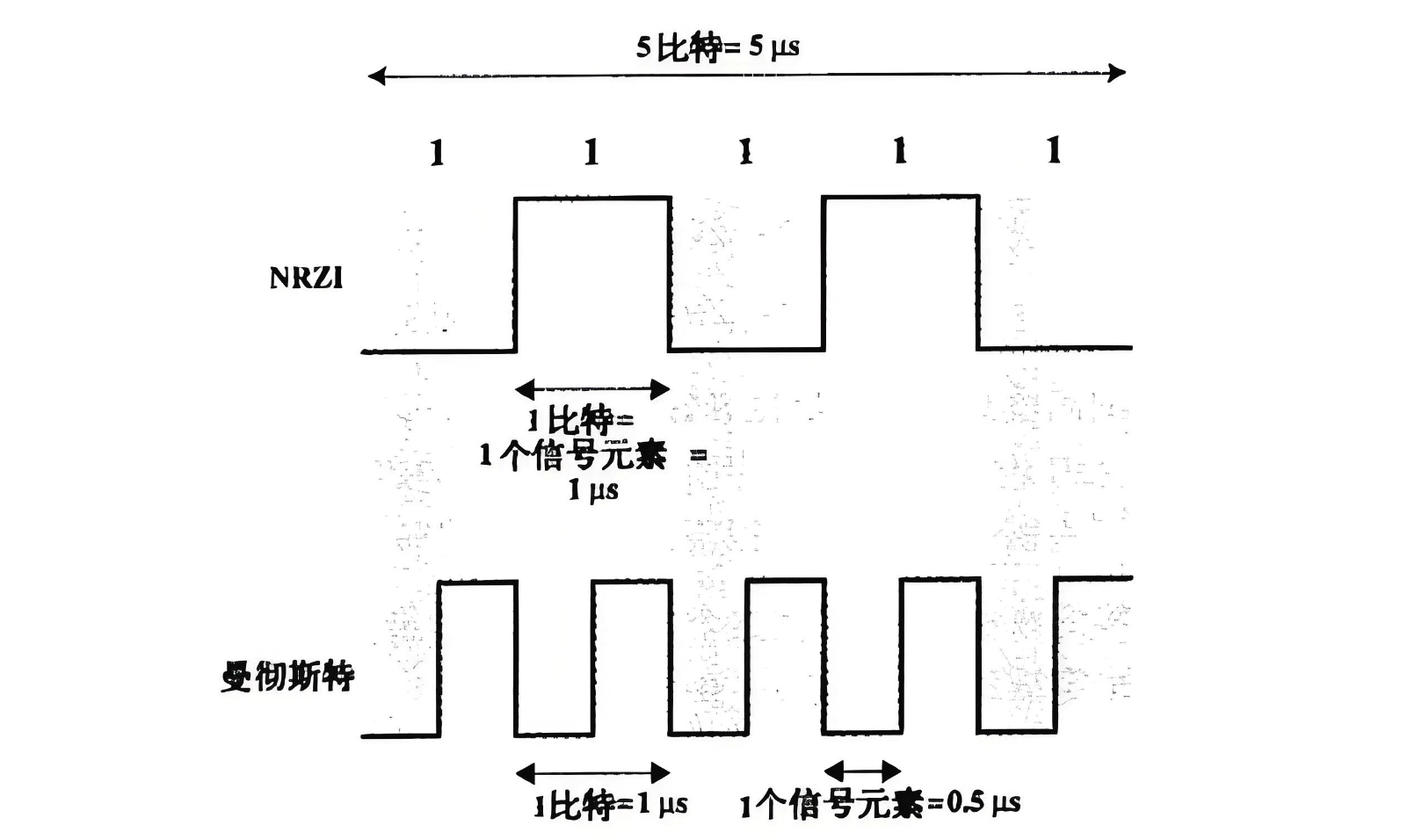
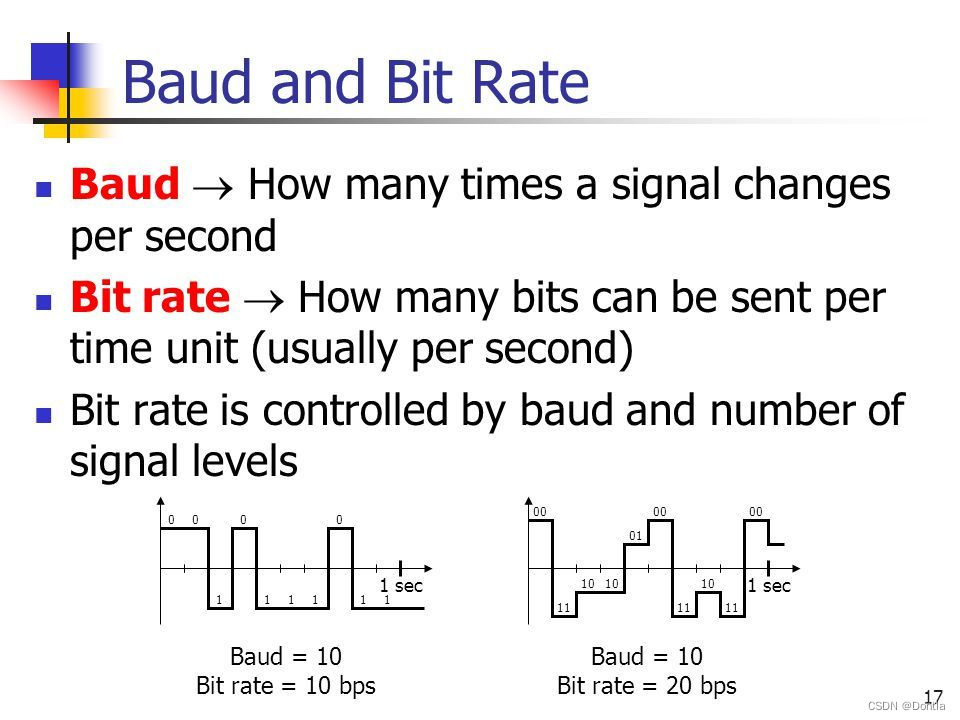
波特率和(FSK)调制速率的关系
最近在学习基于STM32的FSK解调,刚开始一直对波特率和FSK调制速率两者的概念有些混淆,于是出一篇帖子进行总结。 在百度百科中查到: 调制速率定义 在电子通信领域,调制速率,指的是信号被调制以后在单位时间内的变化,即单位时间内载波参数变化的次数。它是对符号传输速率的一种度量,1波特即指每秒传输1个符号。 波特率(Baud rate)等于调制速率。 波特率有时候会同比特率混淆,
智林开发板Z32R串口例程波特率错误修正
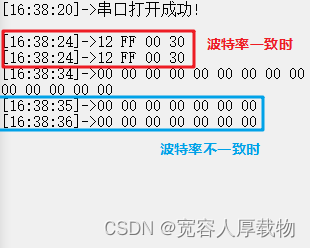
手中有一个智林的开发板,型号Z32R的,里面的串口通信的例子,开始时测试时波特率9600,总是乱码。后来把通信的波特率无意提高到14400,居然没有乱码了。 后来看网上的教程,一般的开发板外面的晶振都是8MHz的,而智林这一款是12MHz。如果是8MHz,9倍频是72M,而现在是12MHz,还是9倍频,实际是102M,给超频了。 根据手册和网上的资料,发现设置时钟配置寄存器(RCC_CFGR)
【51单片机】串口通信实验(包括波特率如何计算)
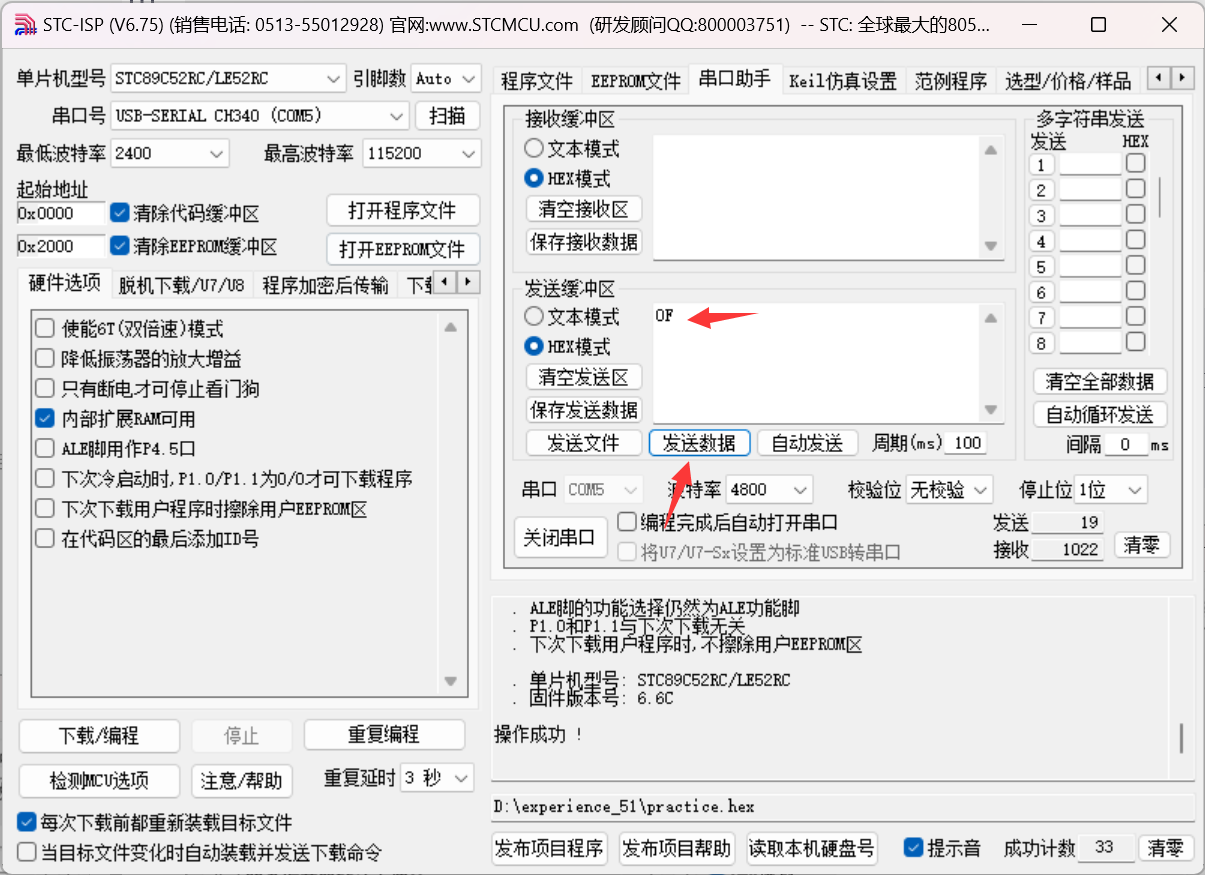
目录 串口通信实验通信的基本概念串行通信与并行通信异步通信与同步通信单工、 半双工与全双工通信通信速率 51单片机串口介绍串口介绍串口通信简介串口相关寄存器串口工作方式方式0方式1方式 2 和方式 3 串口的使用方法(计算波特率) 硬件设计软件设计1、向单片机发送数据 0x112、向单片机发送一个不断加1的数3、通过电脑端发送一个数据去点亮led灯 **** 串口通信实验
使用外部晶振做串口通讯时,波特率变为设置值的一半
现在我改成使用外部时钟,晶振为8M,设置波特率为115200,电脑上要将波特率设置为57600时才能正常通讯 改库文件中定义的晶振频率参数即可 把stm32f10x.h文件中的#define HSE_VALUE ((u32)16000000)改为#define HSE_VALUE ((u32)8000000)即可。
波特率是什么?(Baudrate)波特率的底层原理(以RS-232通信为例)(每秒钟传输的符号(signal events 或 pulses)数量)
文章目录 原20231117 波特率反映了信息的传递速率20231117 波特率的底层原理(以RS-232通信为例)波特率和比特率波特率的底层原理举例波特率设置过高或过低有什么影响?(以RS485 Modbus通信为例)波特率设置过高波特率设置过低 总结 原 在信息传输通道中,携带数据信息的信号单元叫码元,单位时间内通过信道传输的码元数称为码元传输速率,简称波特率,其单位是波
C#winform上位机开发学习笔记7-串口助手的波特率参数设置功能添加
1.功能描述 上位机与下位机进行通讯时需要用到波特率设置功能,以及尝试与下位机实体进行通讯。 2.代码部分 步骤1:串口开启按钮事件中添加代码 serialPort1.BaudRate = Convert.ToInt32(comboBox14.Text, 10);//将十进制的文本转换为32位整型赋值给串口1的波特率 步骤2:波特率参数设置复选框事件中添加代码 //波特率设置复选框事件
RT-Thread: 控制台调试串口波特率更改
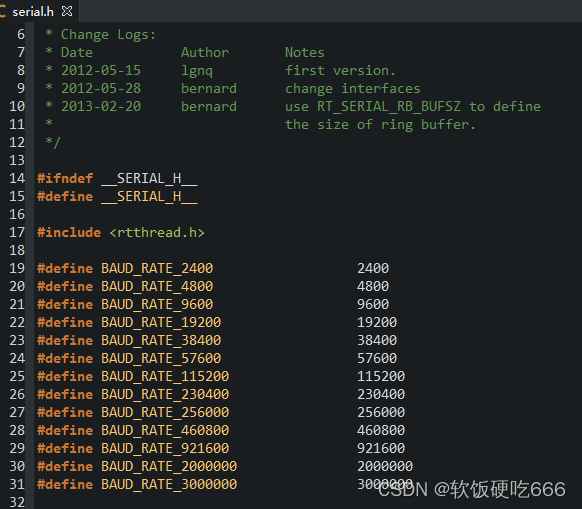
说明:rt_kprintf 函数是RT 的一个调试接口使用的函数,波特率默认是 115200 ,本文介绍更改这个波特率。 1.根据截图路径找到文件 serial.h 修改如下代码中关于波特率定义部分。 /* Default config for serial_configure structure */#define RT_SERIAL_CONFIG_DEFAULT \

bsp28335 can波特率设置
按照以上公式进行计算: ECanbShadow.CANBTC.bit.BRPREG = 39; ECanbShadow.CANBTC.bit.TSEG2REG = 2; ECanbShadow.CANBTC.bit.TSEG1REG = 10; 比如这个就是125k,如果想改为其他波特率,只需要修改 ECanbShadow.CANBTC.bit.BRPREG 的值就

如何查看串口号和波特率?
serialport引入后,设备也接上了,一直不知道串口号和波特率去哪里找,当时这个问题困扰了我很久 将设备的线插入到电脑上的插口(串口)桌面的【此电脑】上右击选择管理,打开【设备管理器】在【端口】中找到对应的端口,如果不知道是哪个就拔掉重新插进去一下看看多了哪个 对应设备名称后面括号里面的就是串口号,例如"蓝牙链接上的标准串行(COM3)",COM3就是串口号右击对应的串口,点击【
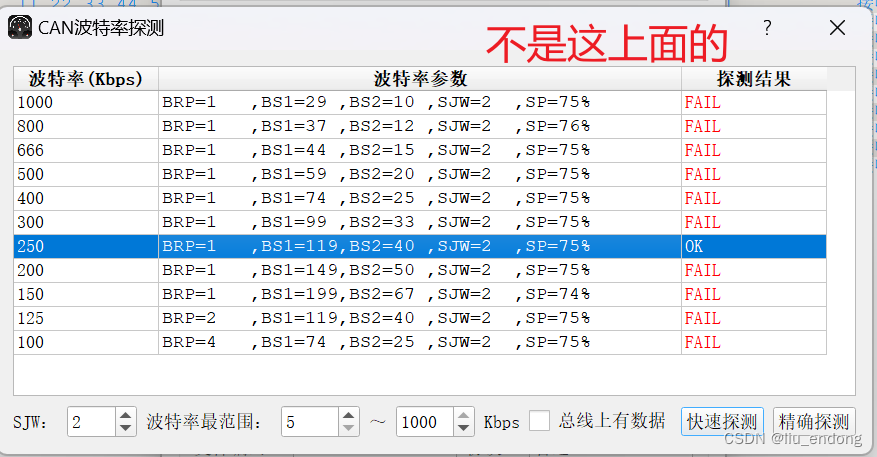
如何计算CAN通信波特率
目录 1、理论 2、实践 3、注意事项 在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。 1、理论 波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。 时钟频率(Fclk) CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。 分频因子(Prescaler)