本文主要是介绍谁说串口通信波特率越高越好?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在电子世界里,串口通信就像是电子设备之间的“悄悄话”,它们通过串行数据传输来交换信息。但你知道吗?串口通信的波特率并不是越高越好,这事儿得好好聊聊。
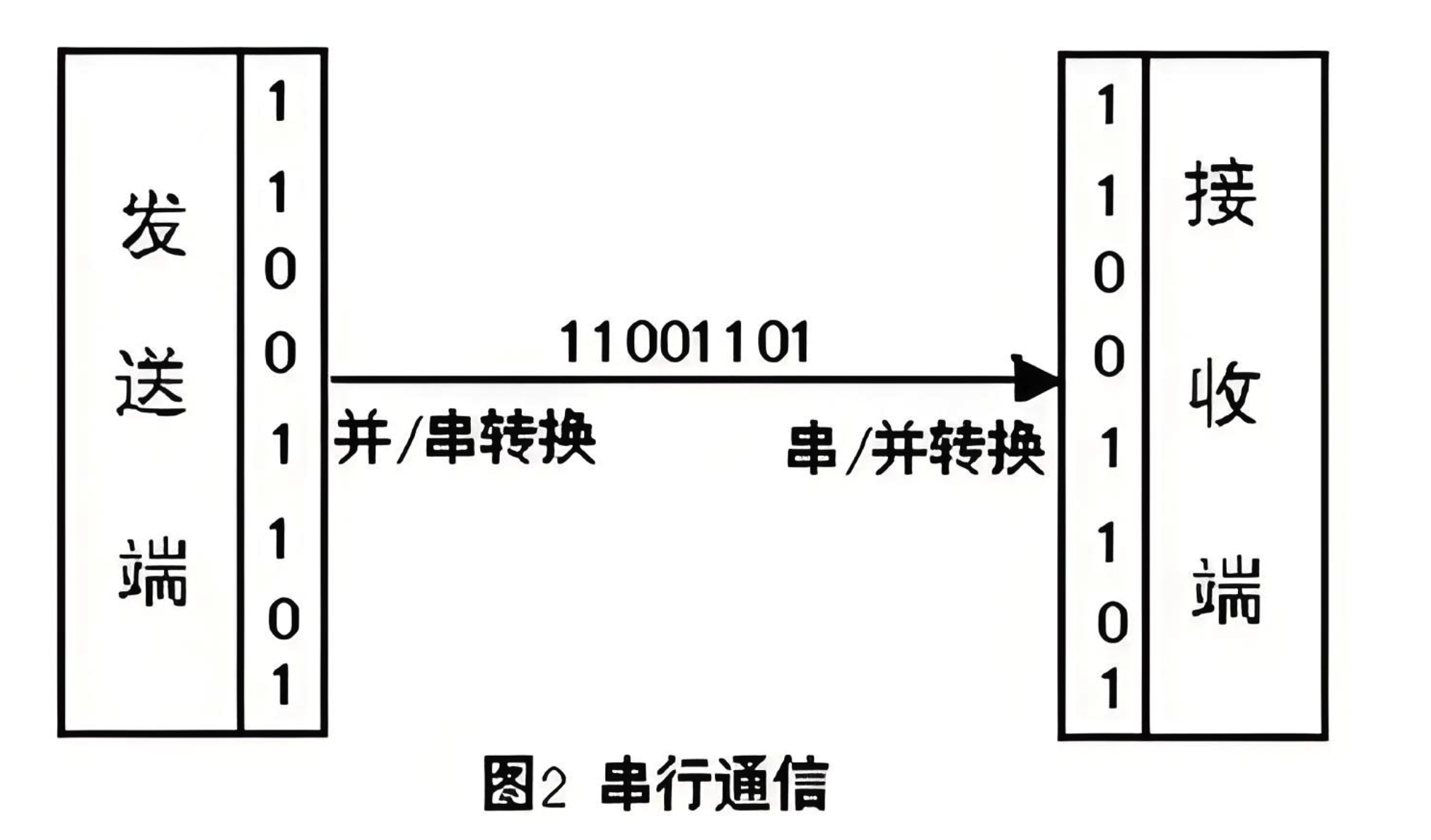
1.什么是串口通信?

串口通信,就像它的名字一样,是一种串行的数据传输方式。它允许设备通过一根线(或几根线)来传递信息。想象一下,你通过一根绳子传递小纸条给朋友,这就是串口通信的基本概念。
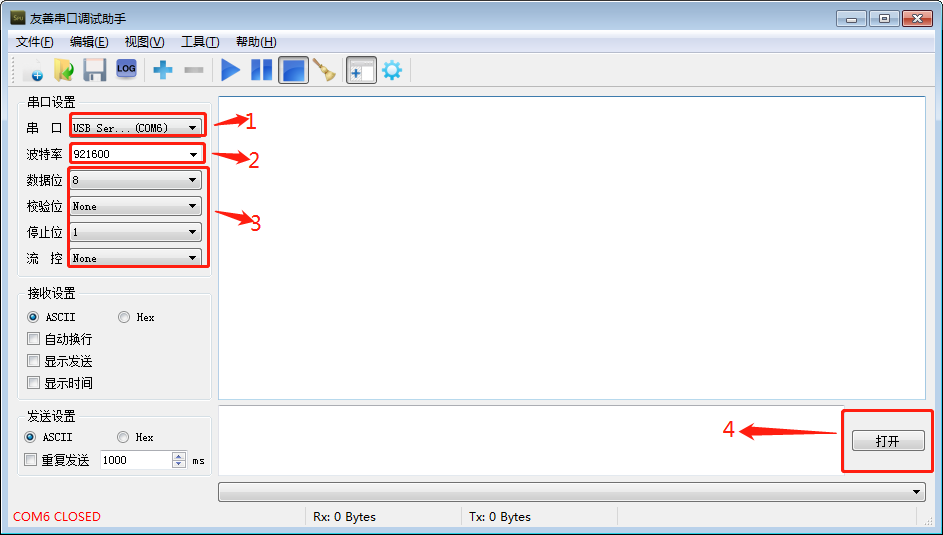
2.串口通信波特率是什么?
波特率,听起来很专业,其实它就是数据传输的速率,单位是波特(Baud)。波特率越高,单位时间内传输的数据就越多。就像你通过绳子传递纸条的速度,速度越快,传递的信息就越多。
3.串口通信中常用的波特率
- 1200 波特率
- 2400 波特率
- 4800 波特率
- 9600 波特率
- 19200 波特率
- 38400 波特率
- 57600 波特率
- 115200 波特率
一般来说,9600波特率是最常用的
4.波特率怎么选择?
选择波特率,就像是选择跑步的速度。跑得太快,可能会摔倒;跑得太慢,又达不到目标。波特率的选择需要考虑设备之间的兼容性、传输距离、数据传输的稳定性等因素。有时候,为了确保数据传输的稳定性,可能需要降低波特率。
5.波特率是越高越好吗?
虽然高波特率可以带来更快的数据传输速度,但它也可能带来一些问题。比如,如果接收设备的处理速度跟不上,那么高波特率就可能导致数据丢失或错误。此外,传输距离越远,信号衰减就越严重,这时候过高的波特率可能就不太合适了。
总之,串口通信的波特率并不是越高越好。它需要根据实际的应用场景和设备的能力来选择。就像生活中的很多事情一样,平衡和适合才是最重要的。所以,下次在选择串口通信波特率的时候,记得要权衡利弊,找到最适合你的那个“速度”。
作者介绍:
90后资深架构师,深耕工业可视化,数字化转型,深度学习技术在工业中的应用。深入研究Web3D,SCADA ,深度学习开发应用。开发语言技能JAVA/C#/Python/Golang/Vue3/TypeScript, 关注【工业可视化】带你一起学~
这篇关于谁说串口通信波特率越高越好?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!