油门专题

ardupilot 计算悬停油门的方法
#目录 文章目录 摘要1.计算过程1.悬停油门值更新2.更新油门控制输入滤波值 摘要 本节主要记录ardupilot计算悬停油门值的方法,欢迎批评指正。ardupilot计算悬停油门对于进行稳定的高度控制至关重要。 1.计算过程 根据垂直速度PID输出或者垂直加速度PID输出,得到控制电机保持在一定高度的pwm值,根据这个值在一定条件下计算出悬停油门值。 1.悬停油门值更

离合器 油门 刹车使用要领
离合器 1 快进慢出,踩下时要快速,抬起时定要慢 2 除了停车和换挡,不要去踩离合器就行 3 倒车入库双脚怎么做 左脚踩离合器,右脚踩刹车,慢松离合器,缓慢倒车,到达指 置轻踩刹车到底 4 除了半离合起步和控制速度时可以脚跟着地,其他任何时候踩离合都是后跟不着地的迅速踩下和迅速松掉 4 挂档前,离合器一定要踩到底,然后左脚脚跟着地,作为一个支撑点,脚前掌慢慢的往上抬 5 倒车入库考试过
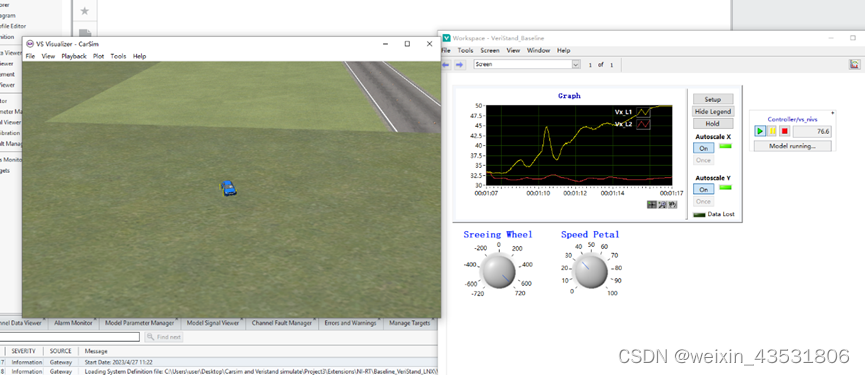
CarsimVeristand联合仿真系列-油门和方向盘信号的配置(纯软件层面,模拟量)04
回到Carsim主界面,这次我们给模型外接两个模拟量信号,分别是油门和方向盘信号 此案例模拟在油门或方向盘变动时,车辆运动状态的改变,此模型是基于DLC 双移路作出更改 框1, 选择COPY AND LINK 完成DLC路的复制并重新命名,并点击进入下层界面配置 进入测试配置界面后,按照下图顺序,依次完成配置 框2 定速 10KM/H 框3 修改成长直线,需单独配置 框4 路桩需配

【转】无人机小课堂:无人机的副翼、俯仰、偏航、油门代表什么?
刚刚接触无人机的小伙伴,经常会听到很多英文缩写,如AIL、ELE、RUD、THR等,一不小心就会傻傻分不清。但它们却经常出现在各种遥控器、飞控、调参软件中,因为它们是无人机、航模中最基础的四个通道。 今天《无人机小课堂》就来给大家说说这些英文缩写的含义。 首先给大家科普一下无人机中的“三轴”概念,无人机有横轴、纵轴、立轴三个轴,绕着这三个轴的运动分别是俯仰(Pitch)、横滚(Roll)、偏航

离合、刹车和油门的正确踩法
今天小编给大家介绍的是离合刹车油门正确踩法。如果大家也想知道的话,那么就看下面小编的见解吧,希望对大家有所启发和帮助。 1、左脚控制离合踏板,右脚控制油门踏板和刹车踏板。用右脚控制油门和刹车,这就决定了只能踩一个踏板,要么踩油门,要么踩刹车。想刹车的时候,一定是右脚离开了油门踏板才能踩刹车,杜绝了油门刹车一起踩的现象。 2、无事不要踩离合。 左脚用不到时,放在车的底盘上,不可以放在踏板上。 在
基于stm32f103rct6舵机控制挖掘机油门及其他控制程序的实现
本套控制系统只针对小型无电脑板的小型挖掘机加装设计,有完整的程序和pcb图纸提供参考,此系统没有液压系统流量检测控制功能,后期想针对各类大型挖掘机电脑板进行设计,因为挖掘机电脑板修理比较昂贵,单单换一个芯片加上重新刷程序,一般动辄上千元修理费,本人单片机初学者,若有欠缺之处希望各位大佬指正 部分主程序 主程序内增加了门禁,光控和对主板的散热保护系统 长短按键中断程序 此中断程序
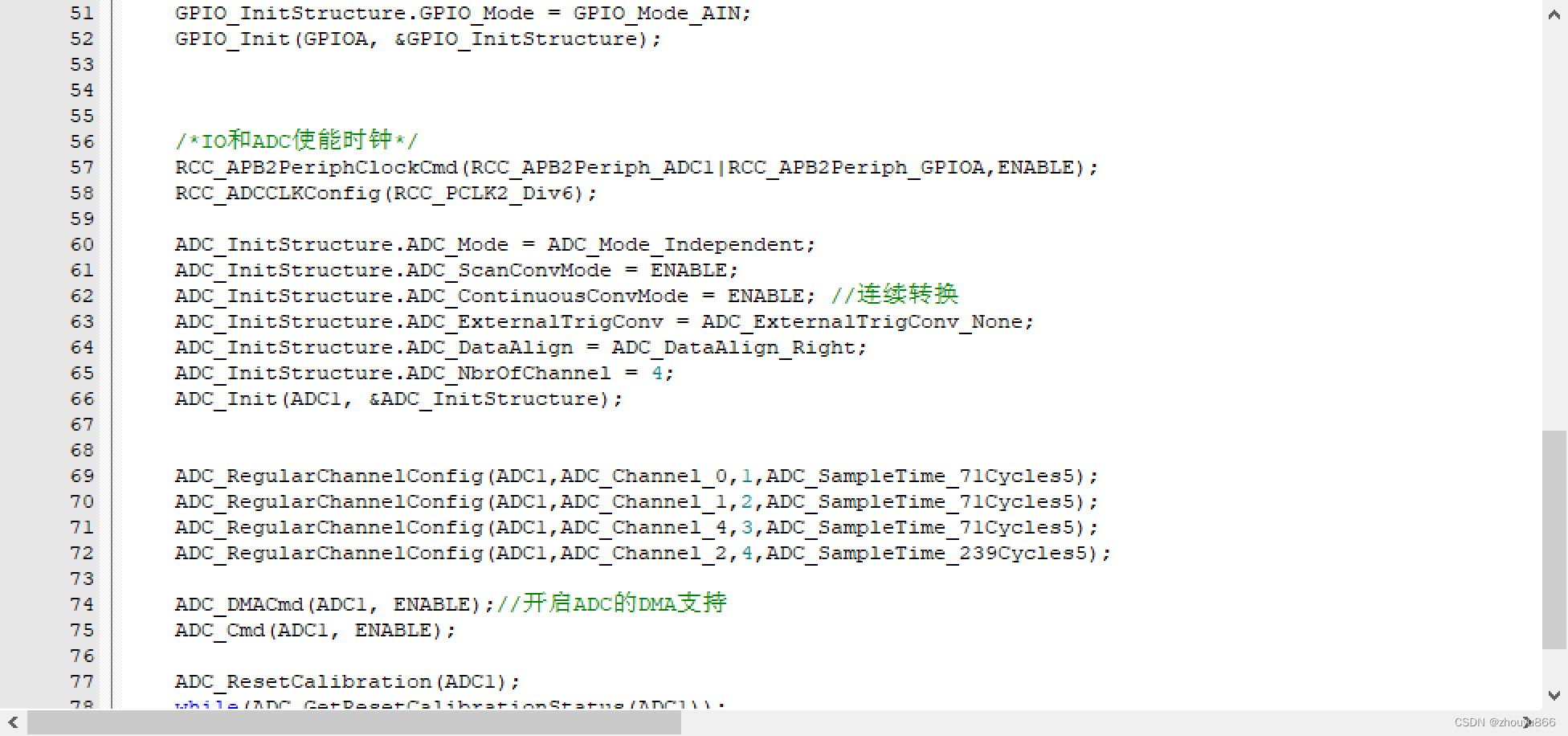
小车舵机控制linux软件,舵机驱动程序编写 - 基于三星S3C2410的ARM-Linux电子控制油门设计...
2.3 舵机驱动程序编写 2.3.1 使用udev来动态建立设备节点 Linux 2.6系列的内核使用udev来管理/dev目录下的设备节点。同时它也用来接替devfs及hotplug的功能,这意味着它要在添加/删除硬件时处理 /dev目录以及所有用户空间的行为,包括加载firmware时。udev依赖于sysfs输出到用户空间的所有设备信息,以及当设备添加或者删除时 /sbin/hotplug
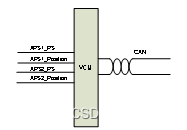
【AUTOSAR】VCU开发实际项目讲解(十二)----VCU油门踏板解析功能
油门踏板解析功能 功能概述 油门踏板解析完成以下功能: 油门踏板解析 原理框图 信号列表 输入信号 序号 信号描述 输入/输出 类型 有效值 (接通时) 湿电流 备注 1 APS1_Position Input 模拟信号 - 油门踏板1采样值 2 APS2_Position Input 模拟信号 - 油门踏板