椭球专题
使用ArcGIS进行椭球转换和投影转换以及小范围内平移比较
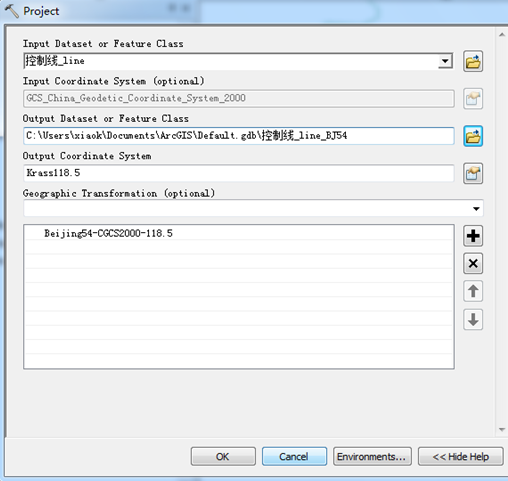
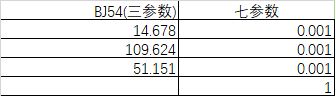
在ArcGIS10.2 的ArcTools/Data Management Tools/Projections and Transformations/CreateCustomGeoTransformation可以自定义椭球转换参数,可以选用CoordFrame(七参数)或者GeoCentric_Translation(三参数) 设定好参数以后就可以转换了,选择一个Feature Clas
FreeCAD傻瓜教程之创建参数化几何图形-螺旋体、平面、球体、椭球体、圆柱体、圆锥体、棱柱、椭圆
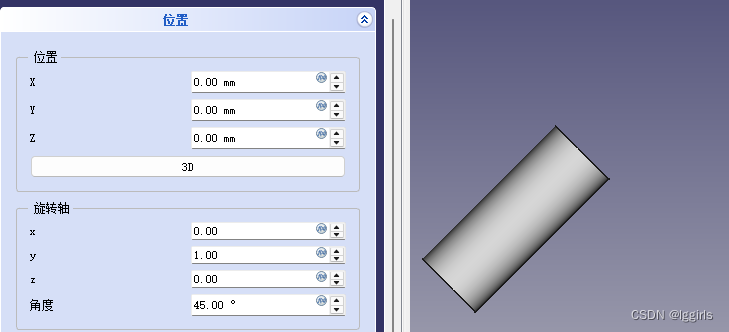
目的:学会用FreeCAD绘制参数化的几何图形。 一、使用的工作台和工具 1.1选择Part 工作台 1.2单击创建图元...工具 也就是上图黄色工具区域的倒数第2个 1.3 打开几何图元 下方的下拉列表 二、绘制螺旋体、弹簧、螺丝杆 2.1 选择几何图元列表中的 “螺旋体” 设置 节距、高度、半径、坐标系等数值 2.2使用放样功能对弹簧线材进行填充 2.2.1
北京54坐标系:参心坐标系,采用的克拉索夫斯基椭球参数,原点在前苏联的普尔科沃;西安80坐标系:1975国际大地测量与地球物理联合会第十六届大会推荐的数据,原点在泾阳镇永乐镇,CGCS2000坐标系为
这里写自定义目录标题 欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入

基于WGS84 椭球恒向线距离计算沿纬度_经度路径行驶的距离附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划

与椭球建模相关的论文阅读
所有的论文都是出自一个人,很有意思,通过椭球的建模方式写了三篇论文。 Camera Relocalization with Ellipsoidal Abstraction of Objects 解决的问题: 相机的重定位位姿求解 提出的方法: 根据目标检测结果以及场景中物体的信息,基于椭球和椭圆之间的对应关系求解相机位姿。相机位姿的求解公式与之前的QuadricSLAM的推导不同,主要利用的关

椭球绘制-Python
椭球绘制-Python import numpy as npimport matplotlib.pyplot as pltfrom mpl_toolkits.mplot3d import Axes3Dfig = plt.figure(1) #定义figureax = Axes3D(fig) #将figure变为3Dx1 = np.arange(-10,10,0.2) #定义x1

地理测绘基础知识(2)-椭球最短距离计算
在上一篇中,我们介绍了ECEF坐标系和经纬度的互换。 本篇,主要介绍已知A\B两个点的经纬度,如何求取椭球上的最短距离、路径。 在标准椭球面上,从A点运动到B点,距离如何,轨迹、每个阶段的方向又是如何呢? 要讨论方向,会引出两个概念。第一个是切平面坐标系,这是讨论"方向"的基础。第二个是运动,即考虑不同时刻、不同位置之间的关系与变化规律。 1 切面坐标系 站在地表,一般使用的是东北坐标系E
WGS84大地坐标转目标椭球平面坐标完整代码和步骤___含高精度高斯投影(正算)
WGS84大地坐标转目标椭球平面坐标完整代码和步骤___含高精度高斯投影(正算) 最近摸索高精度坐标解算,从WGS84椭球大地坐标转换到目标椭球平面坐标,大都是四步,总结大多公式,如下: 1、从大地坐标转换到空间直角坐标,同椭球,公式基本一致。 VB代码:Dim e2 As Double, N As Doublee2 = 1 - (1 - 1 / f) ^ 2 N = a / Sqr(1
GIS坐标系测绘原理:大地水准面/基准面/参考椭球体/EPSG/SRI/WKT
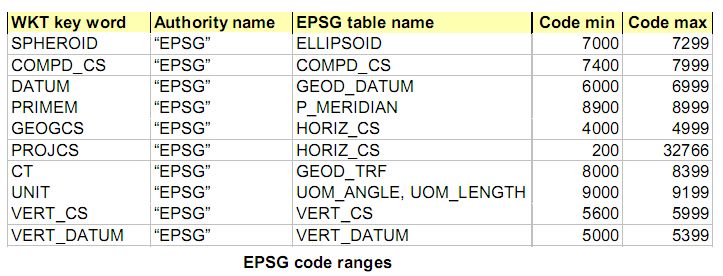
预热文章系列:《GIS历史概述与WebGis应用开发技术浅解》、《GIS坐标系:WGS84,GCJ02,BD09,火星坐标,大地坐标等解析说与转换》、《OGC标准WMTS服务概念与地图商的瓦片编号流派》、《GIS基础知识 - 坐标系、投影、EPSG:4326、EPSG:3857 》我们过一遍如下概念: 地理坐标系是球面坐标,参考平面是椭球面,坐标单位是经纬度; 投影坐标系是平面坐标系,参考平
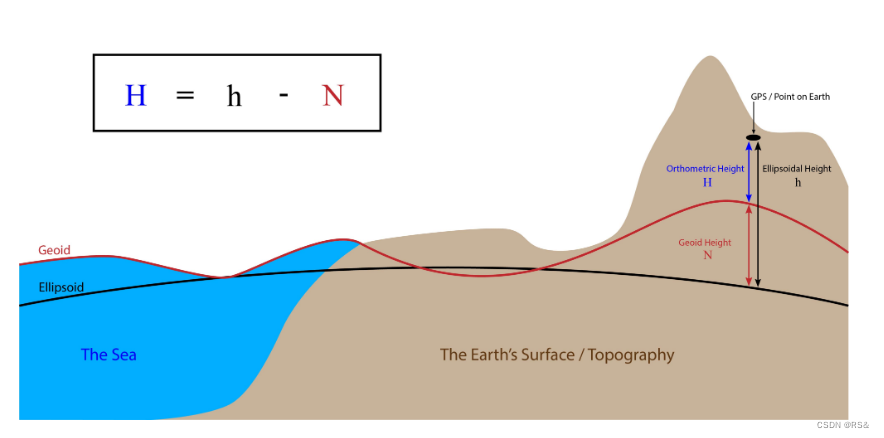
参考椭球体与大地水准面的区别
转载:https://www.propelleraero.com/geoids-vs-ellipsoids-whats-the-difference/ https://support.virtual-surveyor.com/support/solutions/articles/1000261349-the-difference-between-ellipsoidal-geoid-and-ort