本文主要是介绍地理测绘基础知识(2)-椭球最短距离计算,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在上一篇中,我们介绍了ECEF坐标系和经纬度的互换。
本篇,主要介绍已知A\B两个点的经纬度,如何求取椭球上的最短距离、路径。
在标准椭球面上,从A点运动到B点,距离如何,轨迹、每个阶段的方向又是如何呢? 要讨论方向,会引出两个概念。第一个是切平面坐标系,这是讨论"方向"的基础。第二个是运动,即考虑不同时刻、不同位置之间的关系与变化规律。
1 切面坐标系
站在地表,一般使用的是东北坐标系ENU,即切平面坐标。从ECEF坐标转换为ENU (East-North-Up)坐标,如下如所示:
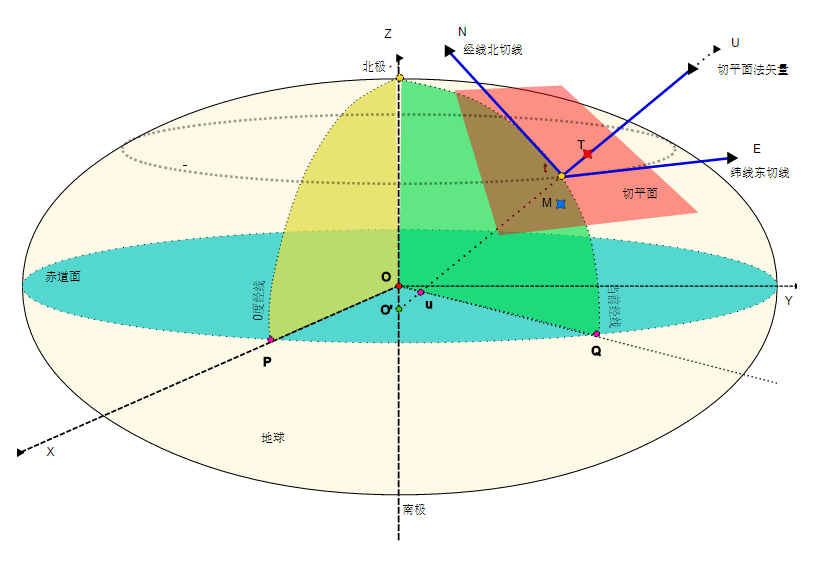
图中,由法向量 t T ⃗ \vec{tT} tT定义的切平面构成了“天圆地方”的参考平面。法向量就是这个坐标系的Z轴。由于尺度不变,这个坐标系和ECEF坐标系是一个旋转关系。
E(East) 单位矢量在经度、纬度均为0度时,切面坐标系的E轴恰好指向正东,就是ECEF的Y方向,取值{0,1,0} 。当经度提高,在X-方向开始有了投影。坐标轴E和纬度无关。旋转经度 θ \theta θ后得到;ECEF坐标系下,E轴的单位矢量:
E ⃗ = { − sin θ , cos θ , 0 } \vec E=\{-\sin \theta,\cos \theta,0\} E={−sinθ,cosθ,0}
N(North) 单位矢量在经度、纬度均为0度时,切面坐标系的E轴恰好指向正北,就是ECEF的Z方向,取值{0,0,1} 。当纬度上升时,在X-方向开始有了投影;ECEF坐标系下,N轴的单位矢量:
N ⃗ = { − sin φ c o s θ , − sin φ sin θ , cos φ } \vec N=\{-\sin \varphi cos\theta,-\sin \varphi \sin \theta,\cos \varphi\} N={−sinφcosθ,−sinφsinθ,cosφ}
U(Up) 单位矢量在经度、纬度均为0度时,切面坐标系的E轴恰好指向{1,0,0}方向。经过纬度旋转、经度旋转后,ECEF坐标系下,U轴的单位矢量:
U ⃗ = { cos φ c o s θ , cos φ sin θ , sin φ } \vec U=\{\cos \varphi cos\theta,\cos \varphi \sin \theta,\sin \varphi\} U={cosφcosθ,cosφsinθ,sinφ}
要计算站在t位置下,查看任意一点 M 的 ENU 坐标,只要执行运算
M E N U ⃗ T = [ E ⃗ N ⃗ U ⃗ ] × ( M E C E F ⃗ − t ⃗ ) T = R × ( M E C E F ⃗ − t ⃗ ) T \vec {M_{ENU}}^T=\begin{bmatrix} {\vec {E} \\ \vec N \\ \vec U}\end{bmatrix} \times \left ( \vec {M_{ECEF}} - \vec t \right )^T =R \times \left ( \vec {M_{ECEF}} - \vec t \right )^T MENUT=[ENU]×(MECEF−t)T=R×(MECEF−t)T
上式中坐标都是行向量,转置后是列向量。需要注意的是,这个旋转矩阵R的左逆、右逆都是自身的转置,故而两类坐标的转换就很方便了。
R = [ − sin θ cos θ 0 − sin φ c o s θ − sin φ sin θ cos φ cos φ c o s θ cos φ sin θ sin φ ] R = \begin{bmatrix} {-\sin \theta} & {\cos \theta} & 0\\ {-\sin \varphi cos\theta} & {-\sin \varphi \sin \theta} & {\cos \varphi} \\ \cos \varphi cos\theta & \cos \varphi \sin \theta & \sin \varphi \end{bmatrix} R= −sinθ−sinφcosθcosφcosθcosθ−sinφsinθcosφsinθ0cosφsinφ
R × R T = R T × R = I R\times R^T=R^T \times R=I R×RT=RT×R=I
主要接口:
/*!* \brief enu_R_from_lla 计算东北天ENU坐标系的旋转矩阵R* \param lla 原点经纬度* \param R R为行向量* \param rad 角度量纲开关,false 是度,true 是弧度* \param latfirst 经纬度顺序,false 是经度\纬度\高度,true 是纬度\经度\高度*/
inline void enu_R_from_lla(const double lla[/*3*/],double R[/*3*/][3],const bool rad = false,const bool latfirst = true);/*!* \brief ecef2enu 从ECEF到东北天ENU坐标系* \param R_A 原点A的旋转阵,通过enu_R_from_lla计算* \param A_ecef 原点A的ECEF* \param B_ecef B的ECEF* \param B_enu B的东北天ENU坐标*/
inline void ecef2enu(const double R_A [/*3*/][3],const double A_ecef [/*3*/],const double B_ecef [/*3*/],double B_enu [/*3*/]);/*!* \brief enu2ecef 从东北天ENU坐标系到ECEF* \param R_A 原点A的旋转阵,通过enu_R_from_lla计算* \param A_ecef 原点A的ECEF* \param B_enu B的东北天ENU坐标* \param B_ecef B的ECEF*/
inline void enu2ecef(const double R_A [/*3*/][3],const double A_ecef [/*3*/],const double B_enu [/*3*/],double B_ecef [/*3*/]);
2 两点间椭球轨迹规划
椭球的最短路径是一个三维空间曲线。在轨迹的各个位置上,由于经纬度不同,椭球的曲率不断变化。同时,理想参考椭球是局部平坦的凸曲面,没有陡峭的局部峰和谷,这使得可以通过"碎步迭代"的方法,较为精确地获得最短路径。
迭代命题:已知起点A、终点B的经纬度,求取在高度H上从A运动到B的最短椭球路径,并计算总距离。
设置距离数值积分量 D D D 初始化为0.
迭代步骤:
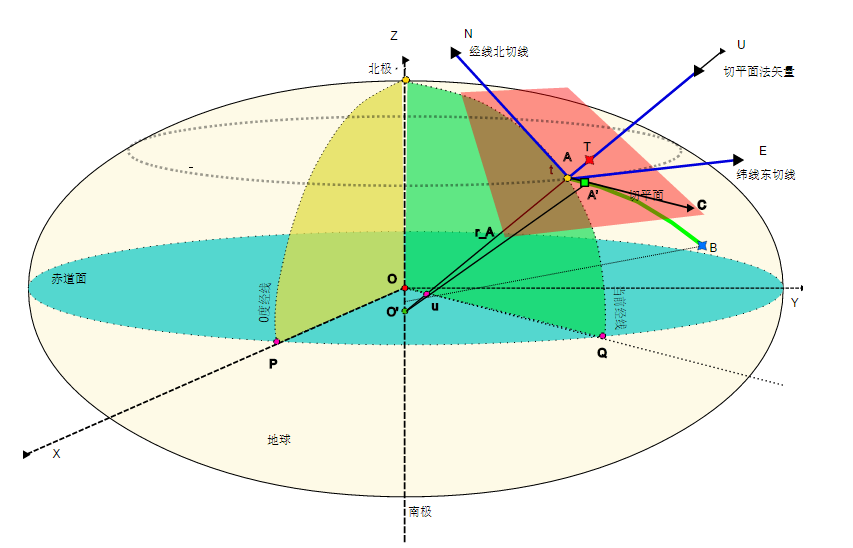
(1) 在当前ENU坐标系下确定方向
把 A,B换算到ECEF下,此刻ECEF向量 B − A ⃗ \vec{B-A} B−A在切平面上的投影指示了最佳方向。在A点建立ENU坐标系,A是原点,此时,B的ENU坐标:
B ⃗ E N U = [ E B N B U B ] = R A × ( B ⃗ − A ⃗ ) T \vec {B}_{ENU}=\begin{bmatrix} {E_B \\ N_B \\ U_B}\end{bmatrix}=R_A \times \left ( \vec {B} - \vec A \right )^T BENU=[EBNBUB]=RA×(B−A)T
在ENU坐标系里,方向定义为正北为0度,顺时针递增:
tan C = E B N B \tan C = \frac {E_B} {N_B} tanC=NBEB
计算出C后,即可计算ENU单位矢量
C E N U ⃗ = { sin C , cos C , 0 } \vec{C_{ENU}}=\{ \sin C, \cos C,0 \} CENU={sinC,cosC,0}
该单位矢量转换到 ECEF下为
C T ⃗ = R A T C E N U ⃗ \vec {C^T} = R_A^T \vec {C_{ENU}} CT=RATCENU
(2) 小步推进
已经知道当前起点A、初始方向C后,在以当前位置A为原点的ENU坐标系下,沿着设置的方向前进一个小距离 Δ \Delta Δ, 得到下一个位置 A’。
由于 Δ \Delta Δ很小,我们认为当前行进的距离,就是以A所在位置为切面的正球上行进的距离。
A 的正球坐标为 A s ⃗ = A ⃗ + { 0 , 0 , − d } \vec {A_s}= \vec A +\{0,0,-d\} As=A+{0,0,−d}
同时,方向C的单位矢量不受平移的影响,指向不变, C s ⃗ = C ⃗ \vec {C_s} = \vec C Cs=C。
沿着方向矢量 C ⃗ s \vec C_s Cs、正球矢量 A s ⃗ \vec {A_s} As生成的正圆,从矢量 A s ⃗ \vec {A_s} As处,旋转 ω \omega ω弧度,就是下一个位置的正球坐标。旋转的弧度可以用下式求解。
c o s ω = Δ r A + H cos \omega=\frac{\Delta}{r_A+H} cosω=rA+HΔ
这里关键是通过弧度得到旋转后的矢量A’,需要用到三维旋转,也就是罗德里格旋转公式.
设
μ ⃗ = A ⃗ s ⊗ C s ⃗ ∣ A ⃗ s ∣ \vec \mu= \frac{\vec A_s \otimes \vec {C_s}}{\left|\vec A_s\right|} μ= As As⊗Cs
A s ′ ⃗ = c o s ω ⋅ A s ⃗ + ( 1 − cos ω ) ( μ ⃗ ⊙ A s ⃗ ) + s i n ω ⋅ μ ⃗ ⊗ A s ⃗ \vec {A_s'}= cos \omega \cdot \vec {A_s} + (1-\cos \omega) (\vec \mu\odot \vec {A_s})+sin\omega \cdot \vec \mu \otimes \vec {A_s} As′=cosω⋅As+(1−cosω)(μ⊙As)+sinω⋅μ⊗As
由于法向量本身就是垂直的,因此投影项为0,上式简化为:
A s ′ ⃗ = c o s ω ⋅ A s ⃗ + s i n ω ⋅ μ ⃗ ⊗ A s ⃗ \vec {A'_s}= cos \omega \cdot \vec {A_s}+sin\omega \cdot \vec \mu \otimes \vec {A_s} As′=cosω⋅As+sinω⋅μ⊗As
最后,把正球下的坐标系平移到ECEF
A ’ ⃗ = A s ′ ⃗ + { 0 , 0 , d } \vec {A’}= \vec {A'_s} +\{0,0,d\} A’=As′+{0,0,d}
通过A’的ECEF,计算A’的经纬度坐标,并设置高度为H。此时,A’的经纬度就是下一位置。
(3) 距离累加
由于 Δ \Delta Δ很小,我们认为当前行进的距离,就是以A所在位置为切面的正球上行进的距离。
D = D + ( r A + H ) ω D=D+(r_A+H)\omega D=D+(rA+H)ω
(4) 继续迭代
推进A到新的位置 A’
A = A ′ A=A' A=A′
并转到(1)。
(5)收敛条件
当A、B距离小于 Δ \Delta Δ时,以AB的正球距离为距离,最终确定总距离。
软件接口:
/*!* \brief ellips_geodesic 椭球的最短测地线求取* \param llaA_in A点经纬度* \param llaB_in B点经纬度* \param maxResults 结果的最大长度* \param resultSpan 结果的间隔为多个步长* \param res_lla 存储经纬度的结果* \param res_ecef 存储ECEF的结果* \param res_Distance 存储距离的结果* \param res_Direction 存储方向的结果* \param res_err 存储剩余距离的结果* \param rad 经纬度为弧度* \param latfirst 纬度在前* \param enudelta 最大步长* \return 结果个数*/
inline int ellips_geodesic(const double llaA_in[/*3*/],const double llaB_in[/*3*/],const int maxResults,const int resultSpan=1,double (*res_lla)[3] = nullptr,double (*res_ecef)[3] = nullptr,double (*res_Distance) = nullptr,double (*res_Direction) = nullptr,double (*res_err) = nullptr,const bool rad = false,const bool latfirst = true,const double enudelta = 1000)
3 进行测试
设置起点与终点,进行测试:
void demo_ellips_geodesic()
{printf("\n\n");const double LLA_A[] = {31.847774515, 117.292115092, 10000};const double LLA_B[] = {37.807300349, -122.366731167,10000};const int maxRes = 32768;double (* lla)[3] = new double [maxRes][3];double (* ecef)[3] = new double [maxRes][3];double * distance = new double [maxRes];double * direction = new double [maxRes];double * err = new double [maxRes];using namespace CES_GEOCALC;const int step = 1000;int res = ellips_geodesic(LLA_A,LLA_B,maxRes,100000/step,lla,ecef,distance,direction,err,false,true,step);for(int i=0;i<res;++i){printf("I=%d LAT=%12.7lf LON=%12.7lf ALT=%7.1lf DIS=%8.1lf DIR=%12.7lf ERR=%lf\n",i,lla[i][0],lla[i][1],lla[i][2],distance[i],direction[i],err[i]);}delete [] lla;delete [] ecef;delete [] distance;delete [] direction;delete [] err;
}
输出:
I=0 LAT= 31.8477745 LON= 117.2921151 ALT=10000.0 DIS= 1000.0 DIR= 43.0147959 ERR=9113951.151266
I=1 LAT= 32.5040600 LON= 118.0168980 ALT=10000.0 DIS=101000.0 DIR= 43.3985947 ERR=9043525.166938
I=2 LAT= 33.1560649 LON= 118.7522233 ALT=10000.0 DIS=201000.0 DIR= 43.7951513 ERR=8972543.435380
I=3 LAT= 33.8036190 LON= 119.4984456 ALT=10000.0 DIS=301000.1 DIR= 44.2047633 ERR=8901010.433060
I=4 LAT= 34.4465456 LON= 120.2559264 ALT=10000.0 DIS=401000.1 DIR= 44.6277359 ERR=8828930.668846
……
I=102 LAT= 37.8073003 LON=-122.3667312 ALT=10000.0 DIS=10143664.8 DIR= 132.8475527 ERR=0.000000
此轨迹在莫卡托投影下会发生形变,如下图:

4 起点方向椭球轨迹迭代
上面的命题是已知起点、终点,进行路径规划。如果是已知起点、初始方向,则需要进行路径迭代了。由于椭球和正球的曲率不同,虽然在切点t处,二者的法向量是重合的,但一旦离开t处,便会形成误差。
需要在正球模型较为局部的 ω \omega ω弧度内(弧长 Δ \Delta Δ),通过向量旋转求取下一个位置、方向。 上面的第(2)步,已经求取了 A’的位置。在A’上切线的方向,原先是通过观测终点B确定的。然而,在本节的推导中,B是不存在的。我们可以使用正球的切线,近似为真实的方向。
在A’的正球模型下, d 2 d_2 d2是新位置的Z截距,新的切线:
A s 2 ′ = A ’ ⃗ + { 0 , 0 , − d 2 } As_2' = \vec {A’} + \{0,0,-d_2\} As2′=A’+{0,0,−d2}
C 2 ′ = C s 2 ′ = μ ⊗ A s 2 ′ ∣ A s 2 ′ ∣ C'_2=C'_{s2} = \frac{ \mu \otimes As_2'}{|As_2'|} C2′=Cs2′=∣As2′∣μ⊗As2′
该单位矢量需要旋转到 A E N U ′ A'_{ENU} AENU′ 坐标系下
C E N U ′ = R A ′ × C 2 ′ C'_{ENU} = R_{A'}\times C'_2 CENU′=RA′×C2′
最终,通过反正切求取角度:
tan C ′ = E ′ N ′ \tan C' = \frac {E'} {N'} tanC′=N′E′
只要不断使用C’进行迭代,就可以得到完整的轨迹。
软件接口:
/*!* \brief ellips_range 椭球的最短测地线求取* \param llaA_in A点经纬度* \param range 行进的距离* \param range 起始ENU方向* \param maxResults 结果的最大长度* \param resultSpan 结果的间隔为多个步长* \param res_lla 存储经纬度的结果* \param res_ecef 存储ECEF的结果* \param res_Distance 存储距离的结果* \param res_Direction 存储方向的结果* \param res_err 存储剩余距离的结果* \param rad 经纬度为弧度* \param latfirst 纬度在前* \param enudelta 最大步长* \return 结果个数*/
inline int ellips_range(const double llaA_in[/*3*/],const double range,const double direction,const int maxResults,const int resultSpan=1,double (*res_lla)[3] = nullptr,double (*res_ecef)[3] = nullptr,double (*res_Distance) = nullptr,double (*res_Direction) = nullptr,double (*res_err) = nullptr,const bool rad = false,const bool latfirst = true,const double enudelta = 1000)
5 完整工程
代码与工程参考
https://gitcode.net/coloreaglestdio/geocalc/-/blob/master/geocalc.h
这篇关于地理测绘基础知识(2)-椭球最短距离计算的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








