本体专题

protege构建子平知识图谱本体工程
1 引言 以前用java做了一个程序,写了很多年,根据条件来推断,入下面的代码。但这个代码并没有什么技术含量,体力活。于是想着能不能通过知识图谱的技术来做推断呢?能不能让传统的子平计算机程序再往前走一步。 @Service("日进角合")public class JinJiaoHeDayService extends AbstractXchhService {@Overrideprotect
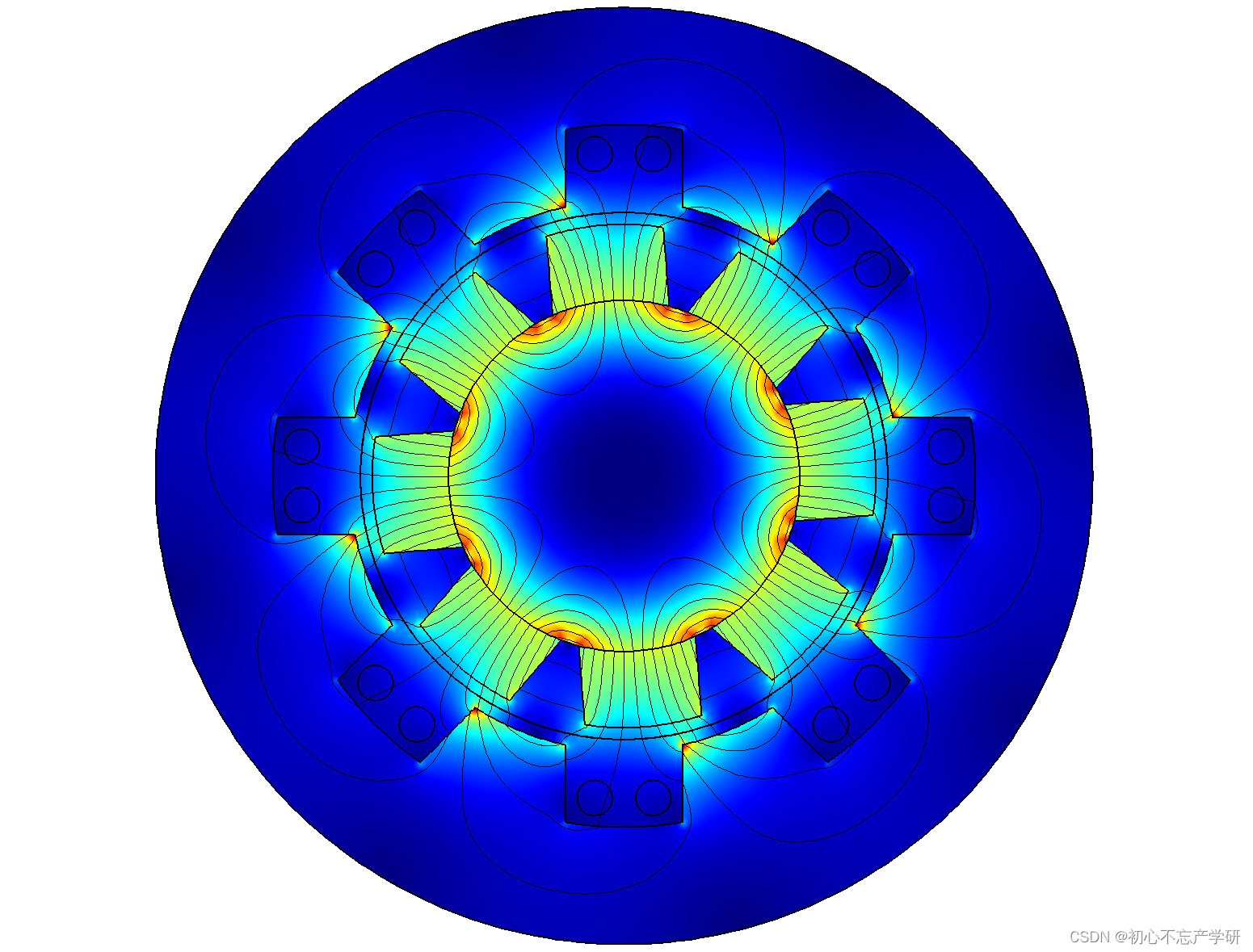
如何利用AI大模型设计电机本体?
一、背景 AI在电机本体设计中的应用正逐渐成为提升设计效率、优化性能和降低成本的重要手段。通过深度学习、机器学习、计算机辅助设计(CAD)和仿真技术的结合,AI能够帮助工程师更快速准确地完成电机的设计与优化工作。以下是AI在电机本体设计中的一些关键应用方向: 1. **参数优化**:AI可以分析大量历史数据和模拟结果,学习电机性能与设计参数(如磁极数、绕组结构、材料选择等)之间的复杂关系。利用
AudioSet 本体与声音实体对象
AudioSet 是由 Google 研究团队开发的一个大规模的音频事件识别数据集,它定义了一个层级化的本体(ontology),用于对音频事件进行分类。它包含了丰富的音频类别,每个类别都有其唯一的标识符(ID)。 这些标识符通常基于知识图谱中的,特别是与 Freebase 和 Wikidata 这样的知识库相关联。 1. AudioSet 本体的定义 文件 ontology.
2、选择什么样的机器人本体
如果说世界是物质的,那么应该先制造出机器人的本体,再让她产生灵魂。如果是精神的呢,世界是无中生有的呢,那就先在仿真中研究算法吧。 而我比较崇尚初中哲学的一句话,世界是物质的,物质是运动的,运动是有规律的,规律是可以认识的。所以我先选择了本体。1、InMoov 首先的一个强烈的冲动,是制造一个全尺寸的人形机器人,可以出席各种活动,与人打招呼,攀
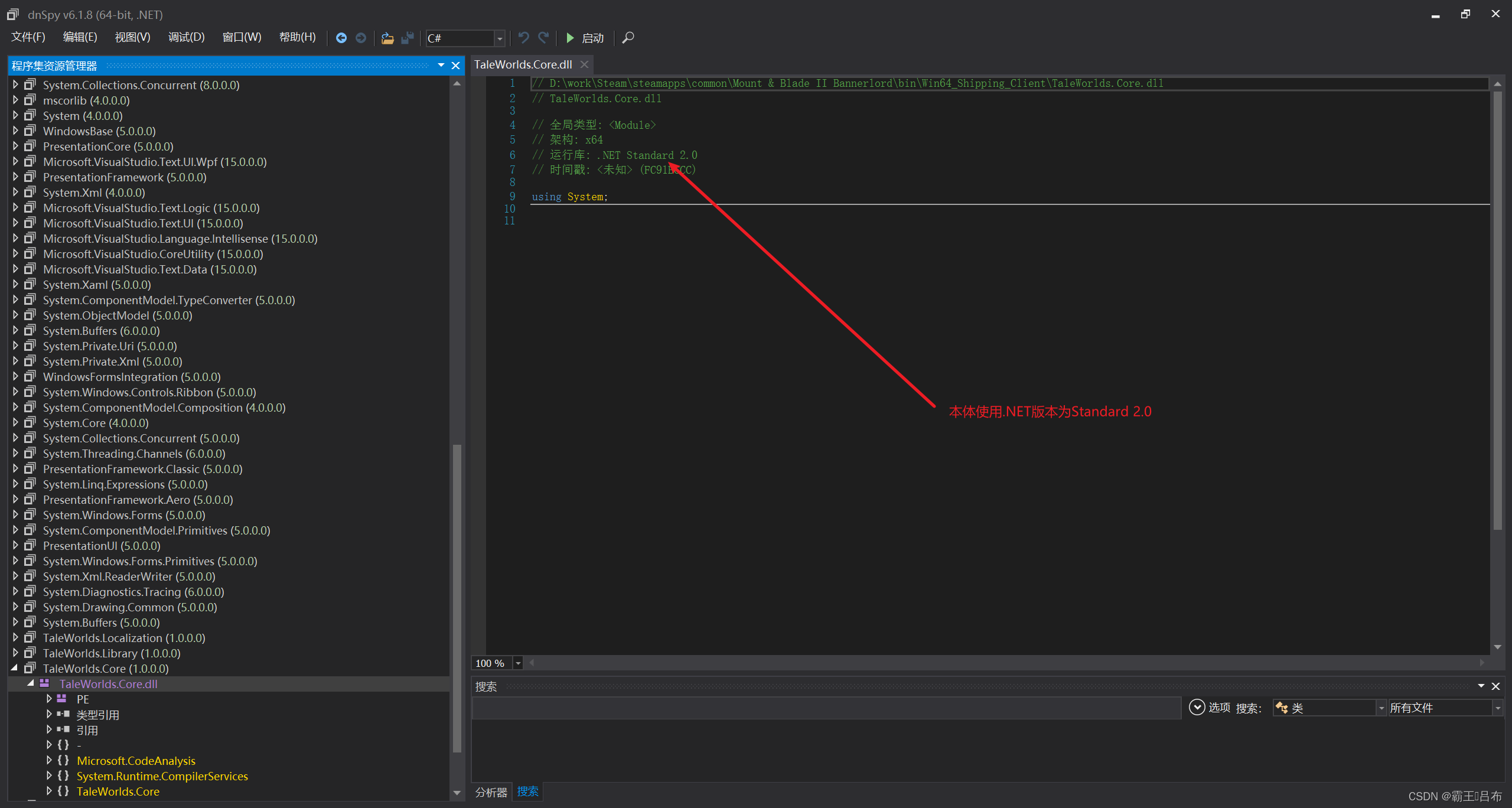
骑砍2霸主MOD开发(6)-使用C#-Harmony修改本体游戏逻辑
一.C#-Harmony反射及动态注入 利用C#运行时环境的反射原理,实现对已加载DLL,未加载DLL中代码替换和前置后置插桩. C#依赖库下载地址:霸王•吕布 / CSharpHarmonyLib · GitCodehttps://gitcode.net/qq_35829452/csharpharmonylib 根据实际运行.Net环境选择对应版本的0Harmony
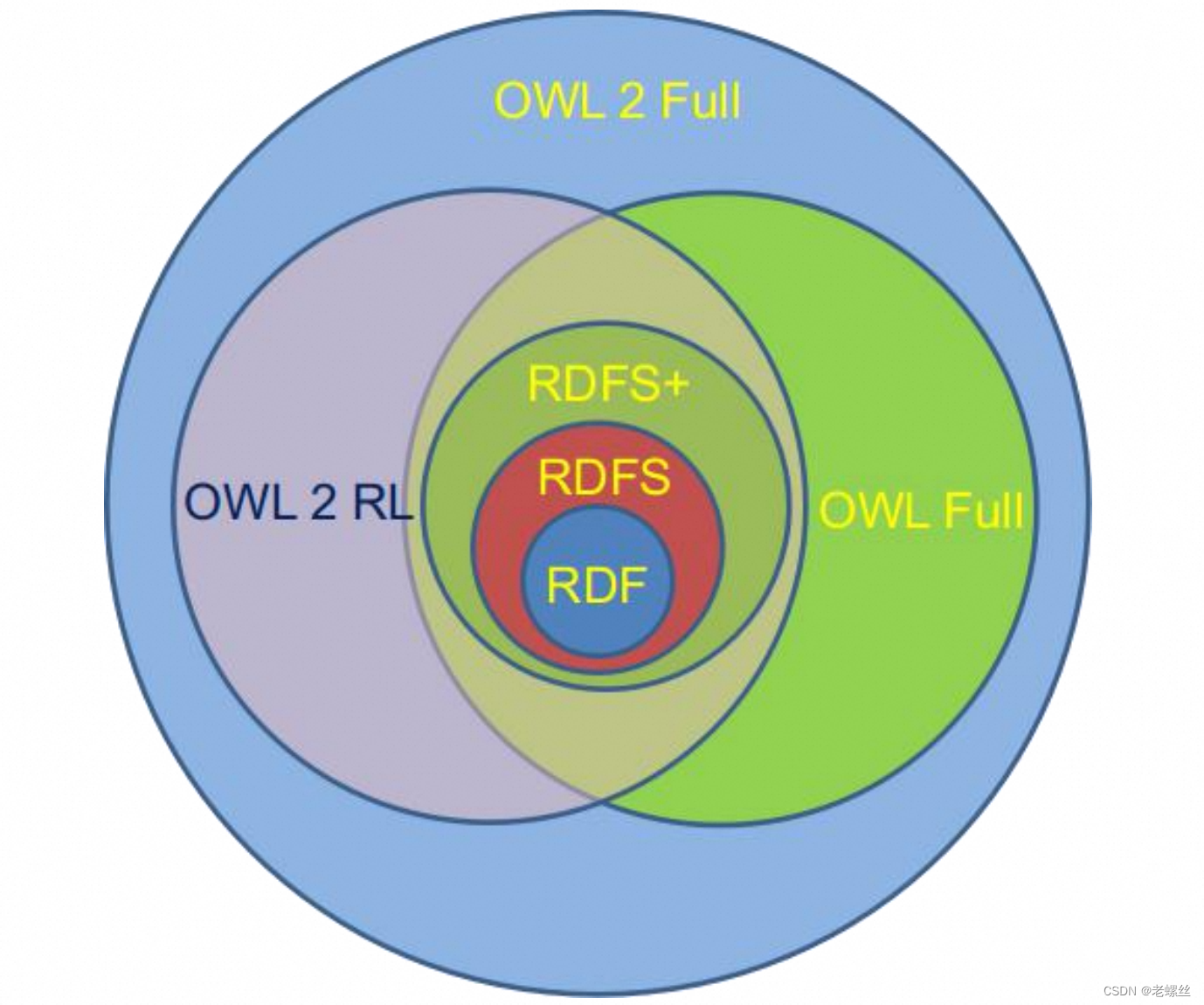
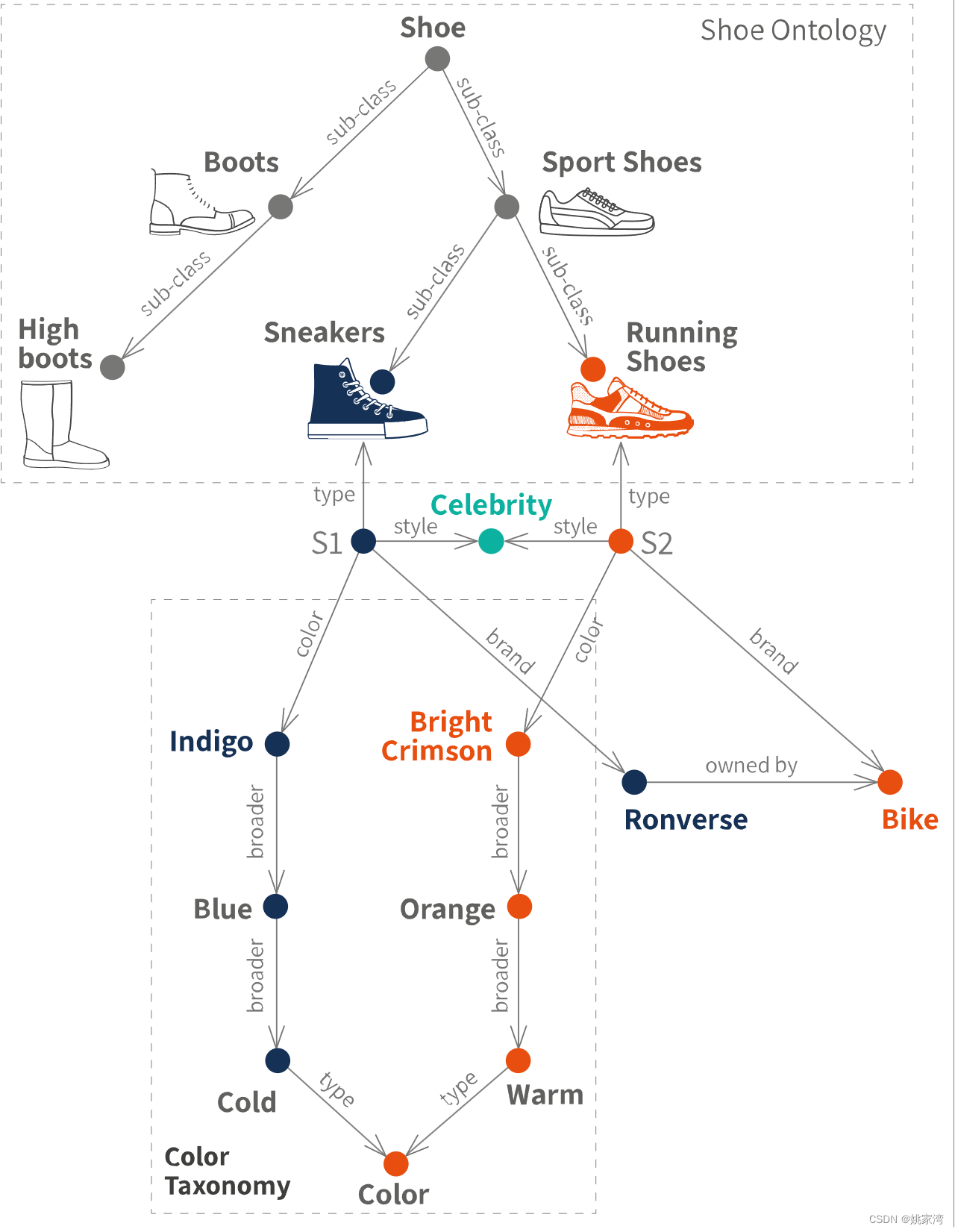
Web本体语言OWL
语义网(Semantic Web): 语义网是万维网联盟(W3C)提出的一种愿景,旨在增强现有Web的表达能力和智能处理能力,通过标准化的技术手段赋予网络数据更加精确和可计算的语义,使得机器能够更好地理解和处理这些数据。它的目标是建立一个全球数据网络,在这个网络中,信息不仅仅是文本和链接,而是结构化的、带有明确含义的数据。 语义网是万维网的一个重要发展方向,为万维网上的知识表示、推理、交换和复用
本体(ontology)信息在工业4.0中的应用
信息技术中的本体与哲学的本体论是不同的,它代表了某个专业领域的基本概念,它们在智能制造和工业4.0 中具有不可或缺的作用,为了实现人与机器,机器与机器之间的确定性操作。一个标准化的,精确定义的本体服务是非常重要的。这是数字化制造过程中的基础工作。 本体论(ontology) 本体(ontology)是哲学领域的话题,称为本体论。论述存在的本质。一旦涉及“存在”
使用Protege创建本体、进行推理
1 前言 本文是小象学院的王昊奋老师的《知识图谱》课程的第二讲小结,即使用Protege软件来创建本体,并进行简单的推理。 Protégé软件是斯坦福大学医学院生物信息研究中心基于Java语言开发的本体编辑和知识获取软件,或者说是本体开发工具,也是基于知识的编辑器,属于开放源代码软件。这个软件主要用于语义网中本体的构建,是语义网中本体构建的核心开发工具。 Protégé提供了本体概念类,关系,

Jena进阶(二)本体推理规则(Rules)的介绍
本体的推理规则库是有一条条规则组成的。每条规则由主体(body)和头(head)组成,一条规则可以有一个主体和一个头,例如规则:[rule1:(?a fa:hasHusband ?b)(?a fa:isMotherOf ?c)->(?b fa:isFatherOf ?c)],其中规则的主体为:?a @hasHusband ?b,?a @isMotherOf ?c,头为:?b @isFatherO

Jena进阶(一):简介+创建本体实例
本文简单介绍Jena(Jena 2.4),使用Protégé 3.1(不是最新版本)创建一个简单的生物(Creature)本体,然后参照Jena文档中的一个例子对本体进行简单的处理,输出本体中的Class、Property等信息。 本文内容安排如下: Ø 介绍Jena Ø 运行Jena Ø Jena Ontology API Ø

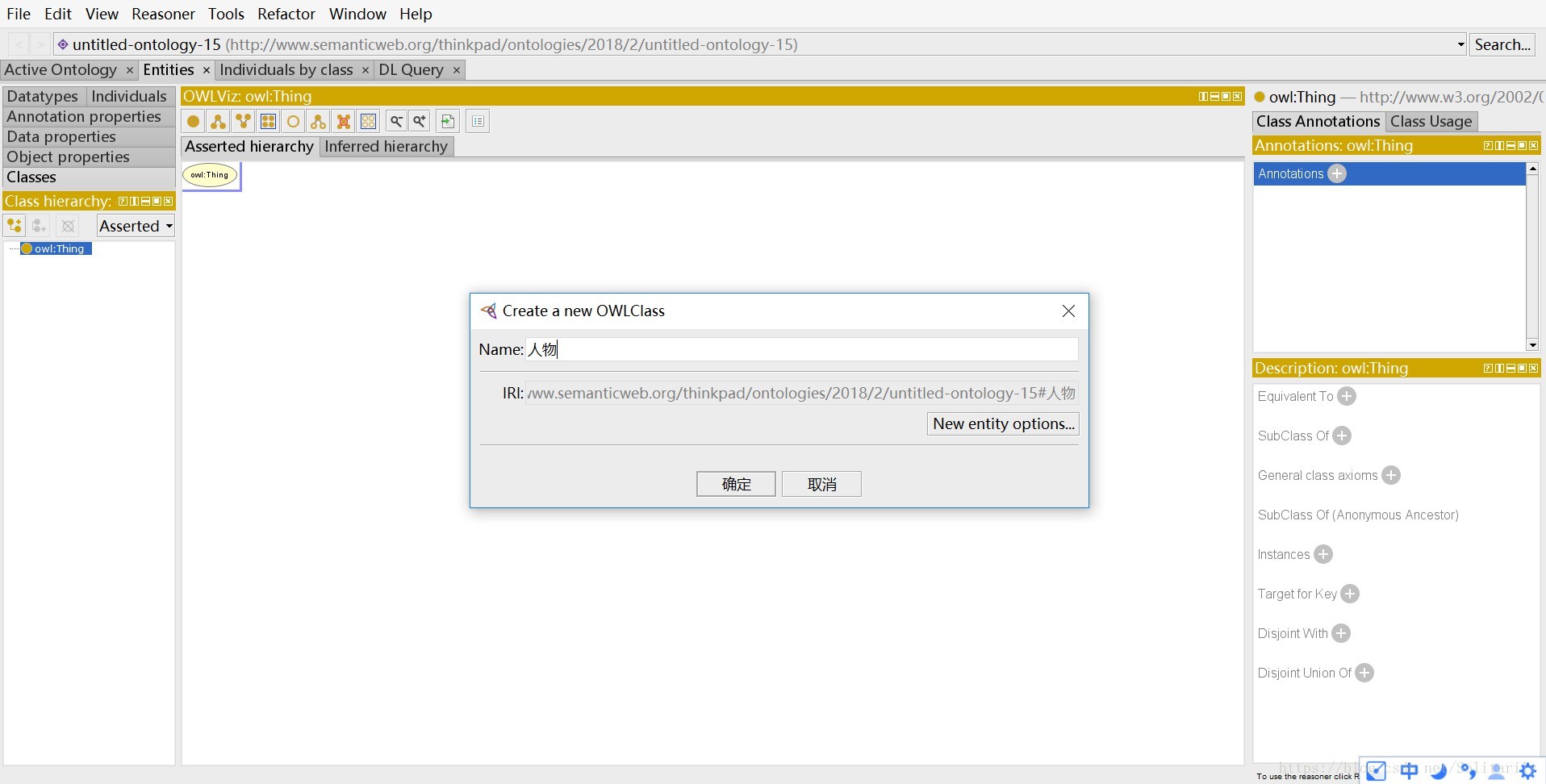
利用protégé构建简单本体
1、构建类 点击 Entities,进入本体编辑界面; 选择 Classes标签,右键点击owl: Thing,选择 Add Subclasses…,在出现的对话框中Name标签后输入类的名字,点击确定; 在 Classes页面点击一个类名,在 Protege右侧 Description部分修改跟该类相关的属性值 2、构建子类 在”人物“上点击右键,选择Add subclass…;在弹

本体构建的主要流程以及Protégé的使用
本体的定义 本体构建常用的软件 本体构架思路与流程 参考Ontology Development 101: A Guide to Creating Your First Ontology 构建本体的方法论 1.确定本体构建的目的及覆盖的领域 几个问题: 我要构建的本体要覆盖什么领域?明确写出A\B\C… 我为了什么需求要构建本体? 我构建的这个本体是为了回答什么问题? 谁会使用

领域本体的构建方法研究
领域本体的构建方法研究 (马文虎,南京理工大学信息管理系) 目 录 引言 1 本体的相关理论 1.1 本体的概述 1.1.1 本体的定义 1.1.2 本体的构成 1.1.3 本体的分类 1.1.4 本体的应用领域 1.2 本体的描述语言 1.3 本体的编辑工具 1.4 建立本体的难点 1.5 本体研究的现状 2 领域本体的构建研究 2.1 领域本体构建遵循的原
【本体2019战略视野解读】框架白皮书的秘密 - “本体链网”隐含深意
原文作者:本体社区成员 雪儿小姐姐 原文链接:https://m.lcyoufu.com/articleDetail?articleid=355271&inviter=dE4Y&VNK=08890a51 -------------------------------------- 今天来解读一下本体的设计理念。 本体刚发布的本体框架白皮书,第一页的概述开门见山,把本体的设计理念和总体视野和

一份精心整理的Ontology(本体)源码、应用及开发教程清单
目录 白皮书本体官网本体区块链源码区块链浏览器开发者文档概览产品文档概览现有DApps简介DApp开发工具DApp开发教程智能合约开发教程SDKs钱包本体开发者激励项目 白皮书 白皮书概览:Introductory White Papers技术白皮书:technical white paper生态白皮书:ecosystem white paper 本体官网 Ontology 本体区块
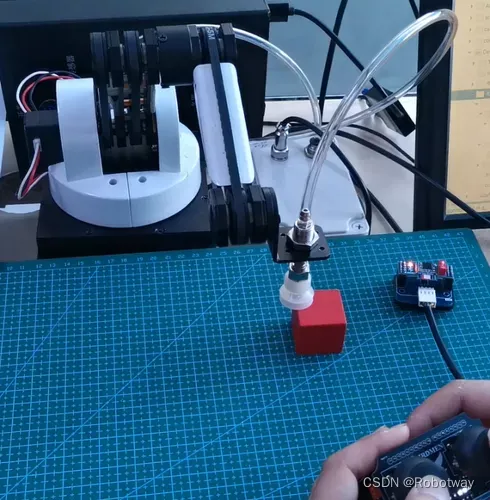
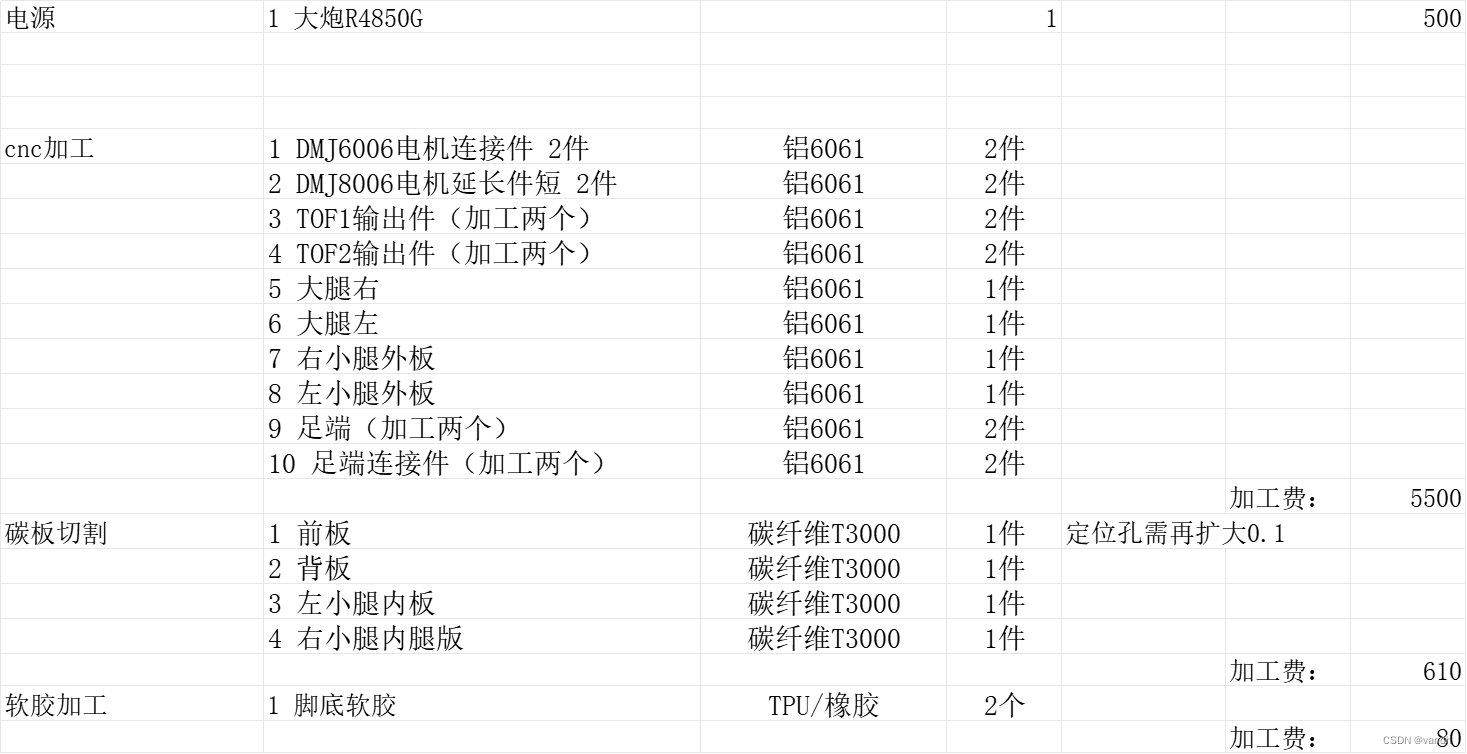
机器人制作开源方案 | 桌面级机械臂--本体说明+驱动及控制
一、本体说明 1. 机械臂整体描述 该桌面级机械臂为模块化设计,包含主机模块1个、转台模块1个、二级摆动模块1个、可编程示教盒1个、2种末端执行器、高清摄像头,以及适配器、组装工具、备用零件等。可将模块快速组合为一个带被动关节的串联3自由度机械臂,亦可进一步加装、更换执行器、传感器来完成各类控制实验。 1.1 机械臂清单介绍 序号 名称 备注 1 本体
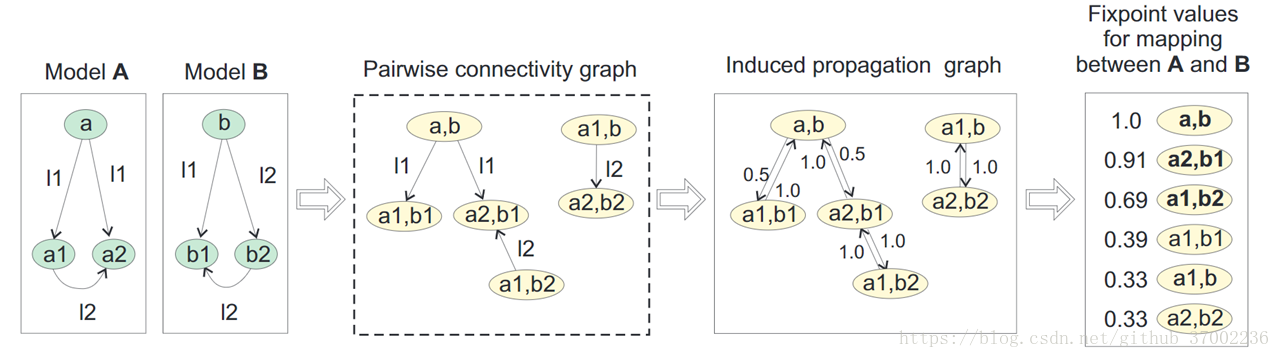
知识图谱---本体匹配(基于结构)
基于相似度的本体匹配 2.1.sf(similiarity flooding) 1)pairwise connectivity graph(PCG) : ((x; y); p; (x'; y')) 属于 PCG(A;B)<==>(x; p; x') € A and (y; p; y') € B。 关键是p要相同,也就是边的名字一样。式子从右向左推导,就可以A、B从两个模型建立起它们的PCG

本体开发日记05-努力理解SWRL(Built-Ins)
八、内置程序 简介8.1 Built-Ins for Comparisons用于比较的内置函数8.2 Math Built-Ins8.3 Built-Ins for Boolean Values8.4 Built-Ins for Strings8.5 Built-Ins for Date, Time and Duration8.6 Built-Ins for URIs总结 简介
本体技术视点 | 区块链世界中的信息价值与身份体系
01 信息的价值 你可能思考过这样一个问题:区块链网络的核心是什么? 图 | 网络 不妨理解为:对节点行为的假设。 节点之间遵循共识算法的假设,作恶节点被发现而受到惩罚,可信的区块链网络得以形成,从而基于这一网络环境开发的链上应用也被认为值得信任。 然而我们不得不承认,区块链网络的节点记账行为会一定程度上形
