实时操作系统专题

集成电路学习:什么是RTOS实时操作系统
RTOS:实时操作系统 RTOS,全称Real Time Operating System,即实时操作系统,是一种专为满足实时控制需求而设计的操作系统。它能够在外部事件或数据产生时,以足够快的速度进行处理,并在规定的时间内控制生产过程或对处理系统做出快速响应。RTOS的主要特点包括及时响应、高可靠性、多任务处理、确定性、资源管理、优先级调度、中断处理和时间管理等。 一、RT

【GD32】RT-Thread实时操作系统移植(GD32F470ZGT6)
1. 简介 最近几年可以发现国产的实时操作系统越来越受欢迎了,本篇要移植的就是当中的翘楚——RT-Thread。 RT-Thread诞生于2006年,是国内以开源中立、社区化发展起来的一款高可靠实时操作系统 ,由睿赛德科技负责开发维护和运营 。并且在上一年度的市场欢迎程度中位列第一,第一次超过了老牌的FreeRTOS系统。 相比于FreeRTO

【GD32】FreeRTOS实时操作系统移植(GD32F470ZGT6)
1. 简介 在日常的应用开发项目中,常常需要单片机具有处理多种任务的需求,如果使用裸机开发那么肯定是不现实的,因为受限于IO与处理器的巨大速度差异,在裸机下处理器常常要等待当前IO操作完成才能进行下一个任务,效率大打折扣。 因此使用实时操作系统成为首选,市面上比较火的的实时操作系统有很多,像这里要介绍的FreeRTOS就是其中之一。FreeRTOS可以说是非常老

uCOS-II学习笔记:实时操作系统(一)
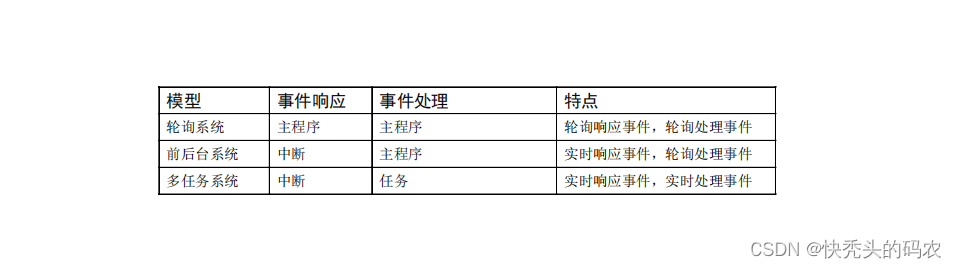
1.前后台系统:前后台系统的架构用一句话来形容的话,就是一个大的循环,加上中断,就形成了一个整的体系。 假设来了中断需要处理模块3,如果模块3的处理是最紧迫的,但是当前cpu 只运行到模块1, 这样的话,必须还要承受模块2的运行时间延迟,才能轮到模块3的处理,当模块越多的时候很可能情况更糟糕。单个循环要解决此类问题的话,只能在中断里面去处理紧急事件,这样会造成中断执行太长,造成多层的中断嵌
RTOS实时操作系统
常见的RTOS有: VxWorks:广泛应用于工业、医疗、通信和航空航天领域。FreeRTOS:一个开源的RTOS,广泛用于嵌入式设备。uc/OS:一个适用于教育和小型商业项目的RTOS。QNX:主要应用于汽车和工业自动化领域。Windows CE(现在称为Windows Embedded Compact):微软提供的嵌入式操作系统。\ 主要特点包括: 确定性(Determinism):系统
主流 RTOS 实时操作系统介绍
主流 RTOS 实时操作系统介绍 1 介绍1.1 概述1.2 RTOS 应用领域1.3 知名实时系统VRTXpSOSOS-9embOSAzure RTOS 【ThreadX 】OpenWrt 【路由】Mbed OS 【ARM 公司开发】VxWorks 【KUKA、ABB、etc】LynxOSQNXNucleusTHREADXuC/OS –II/III 【Silicon Labs 收购,更新频

深入了解FreeRTOS:实时操作系统的核心概念和应用
前言: 在当今数字化世界中,嵌入式系统扮演着至关重要的角色,从工业自动化到智能设备,无所不在。而实时操作系统(RTOS)则是这些系统的核心引擎,它们负责管理任务、资源和时间,确保系统以可靠和高效的方式运行。 我将写一个专栏,将带您深入探索 FreeRTOS,这是一款备受嵌入式开发者青睐的免费、开源的实时操作系统内核。我们将一起探讨 FreeRTOS 的核心概念、

【C++风云录】领略嵌入式世界:嵌入式系统与实时操作系统
打开嵌入式的门:从理论基础到实践应用 前言 在这篇文章中,我们将深入探讨六种不同的嵌入式操作系统,分别是ChibiOS, RIOT OS, eCos, NuttX, Contiki和FreeRTOS。每个操作系统都将包括四部分内容:定义、特性、如何在嵌入式系统中使用以及优点和局限。 欢迎订阅专栏:C++风云录 文章目录 打开嵌入式的门:从理论基础到实践应用前言1. Chibi

嵌入式系统中的实时操作系统(RTOS)深入应用与优化
引言 实时操作系统(RTOS)在嵌入式系统中扮演着至关重要的角色,特别是在需要快速响应和高度可靠性的应用中。 我将探讨如何在STM32单片机上实现RTOS,包括任务管理、内存管理以及中断处理,以提高系统的效率和响应速度。 环境准备 硬件选择:STM32F407,一款高性能的MCU,具有丰富的外设支持。开发环境: Keil MDK-ARM:一种流行的ARM开发工具,支持微控制器的软件开发。U

浅谈菊风实时音视频 (RTC)与实时操作系统 (RTOS) 在智能硬件领域应用
近年来,菊风通过实时音视频赋能智能手表、智能门禁、智能门锁/门铃、智能眼镜等数十种智能硬件,与一众合作伙伴共同探索在IoT智能硬件领域的不同场景应用,积累了丰富的实践经验。在智能硬件中,RTOS因其轻量化的系统内核,赋予终端产品超长续航优势,也成为了智能设备广泛采用的实时操作系统。 随着物联网、移动互联网、实时音视频技术的进一步融合,其用户群体和应用场景正在不断扩大......这次我们就简单


带你认识实时操作系统(rtos)
实时操作系统(RTOS)是为嵌入式系统和实时应用提供一个稳定、可预测和高效运行环境的操作系统。实时操作系统确保了系统能够在严格的时间限制内响应外部事件和处理任务,这是许多关键应用领域所必需的。 实时操作系统与传统的操作系统相比,它更注重于实时性能的保证,确保系统能够在严格的时间限制条件下准确及时的响应处理。 硬实时与软实时 实时操作系统主要分为两大类:硬实时(Hard Real-Ti
嵌入式实时操作系统的调度机制与优化
大家好,今天给大家介绍嵌入式实时操作系统的调度机制与优化,文章末尾附有分享大家一个资料包,差不多150多G。里面学习内容、面经、项目都比较新也比较全!可进群免费领取。 嵌入式实时操作系统的调度机制与优化 一、引言 嵌入式实时操作系统(RTOS)是现代嵌入式系统的核心组成部分,负责管理和调度系统中的各种任务,以确保它们能够在预定的时间内完成。任务调度是RTOS的核心功能之一,它
实时操作系统(RTOS)工作原理
实时操作系统 实时操作系统(RTOS)是一种专门设计用于保证系统对事件或请求作出响应的时限要求的操作系统。这类系统广泛应用于工业控制、航空航天、汽车电子、医疗设备、物联网等领域,其中关键的工作原理包括任务调度、信号量、互斥锁、队列等同步与通信机制。以下对这些核心概念进行详细说明: 1. 任务调度 任务(Task):在RTOS中,任务是可并发执行的基本单位,也称为线程或进程。每个任务具有独立的
实时操作系统何时进行任务调度?————FREERTOS源码分析
实时操作系统何时进行任务调度?————FREERTOS源码分析 0 本文要讨论的是什么 从编码风格的角度去理解,实时操作系统(Real Time Operating System)的关键特征就是引入任务调度器(task shceuler),实现单核多任务调度。 有了这一层次的理解,自然就不应当再像CV工程师那样只关注顶层的 API ,而应当进一步考虑这个问题————调度器是在什么时候起作用的
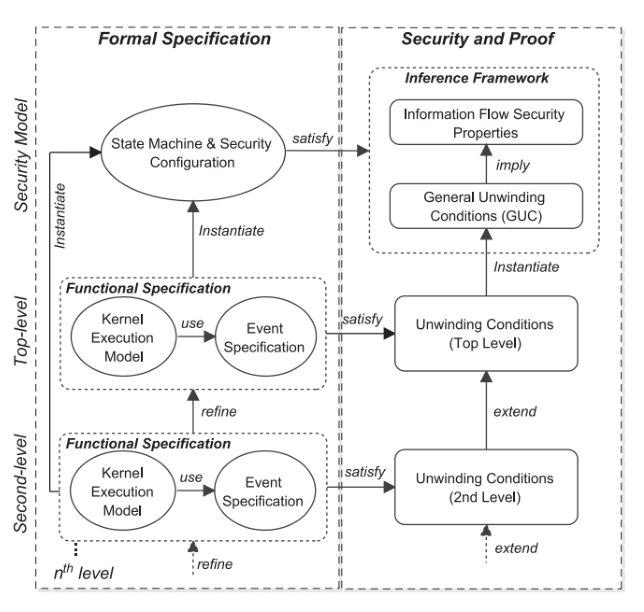
鉴源论坛 · 观模丨嵌入式实时操作系统的形式化验证
作者 | 郭建 上海控安可信软件创新研究院特聘专家 版块 | 鉴源论坛 · 观模 生活在信息时代的今天,信息技术的发展日新月异。软件系统作为信息技术的核心,在轨道交通、汽车电子、医疗器械、航空航天等安全攸关领域有着广泛的应用。由于软件安全的问题而导致的恶劣事件是屡见不鲜。2017年上半年的WannaCry勒索病毒全球大爆发,给全球超过150个国家、30万名网络用户带来了超过80亿美元的损失
让linux变为实时操作系统
https://blog.csdn.net/y33988979/article/details/81989663 我们知道,相对比vxworks,linux内核属于非实时操作系统,原因主要是: (1)实时任务抢占时间是不可预期的。 (2)为什么抢占是不可预期的呢?这涉及到内核中的抢占点知识,其中spin_lock锁,在unlock时是一个抢占点,但是spinlock本身内部是不可以抢占的,这
使用知识图谱来表示普通操作系统实时操作系统以及物联网操作系统
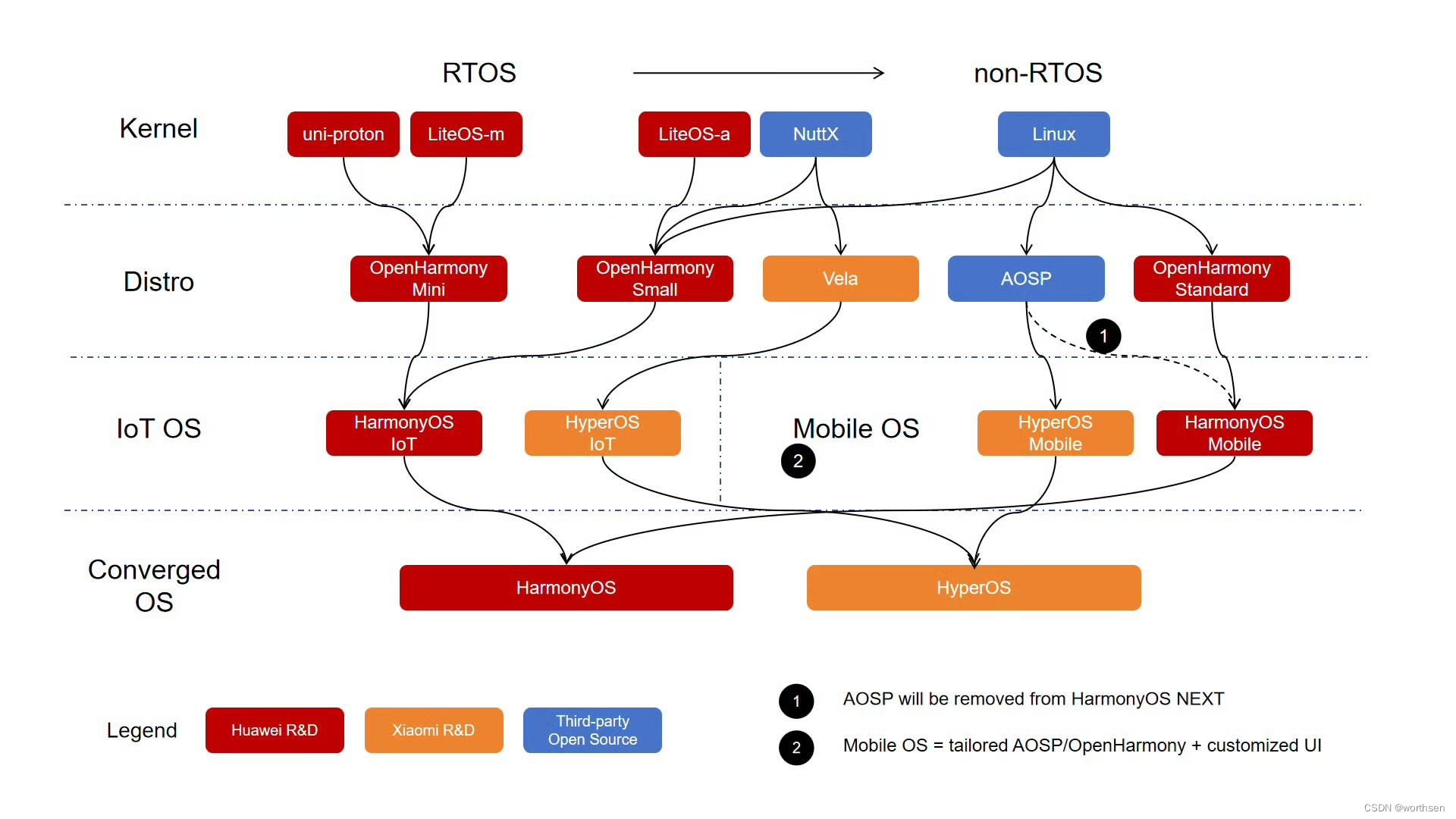
在计算机科学领域,操作系统(Operating System,OS)是一种至关重要的软件,它管理计算机硬件和软件资源,为用户和应用程序提供交互界面。操作系统有多种类型,包括普通操作系统、实时操作系统(RTOS)和物联网操作系统(IoT OS)。为了更好地表示这些操作系统,我们可以使用知识图谱(Knowledge Graph)来建模它们的基本概念、特性、应用场景等。
嵌入式实时操作系统 UCOS
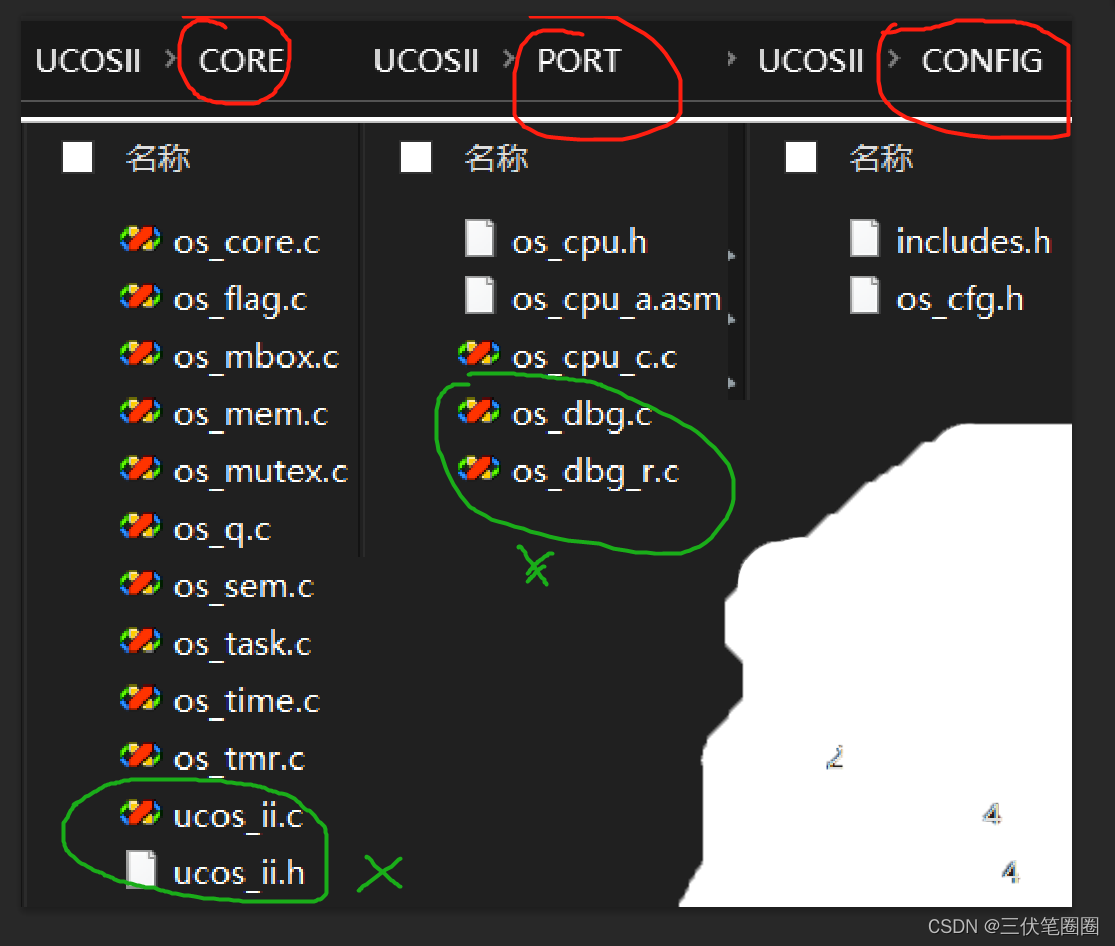
嵌入式实时操作系统 UCOS 1 简介UCOS 区别 2 UCOSII 移植UCOSII 移植 F1 3 UCOSII任务消息邮箱、信号量 编辑时间 20231214 1 简介 uC/OS-II是一种基于优先级的、可抢先的硬实时内核 UCOS 区别 特点(Features)µC/OSµC/OSIIµC/OSIII发布年份199219982009提供源代码√√√书(Book)√
Apollo Cyber RT:引领实时操作系统在自动驾驶领域的创新
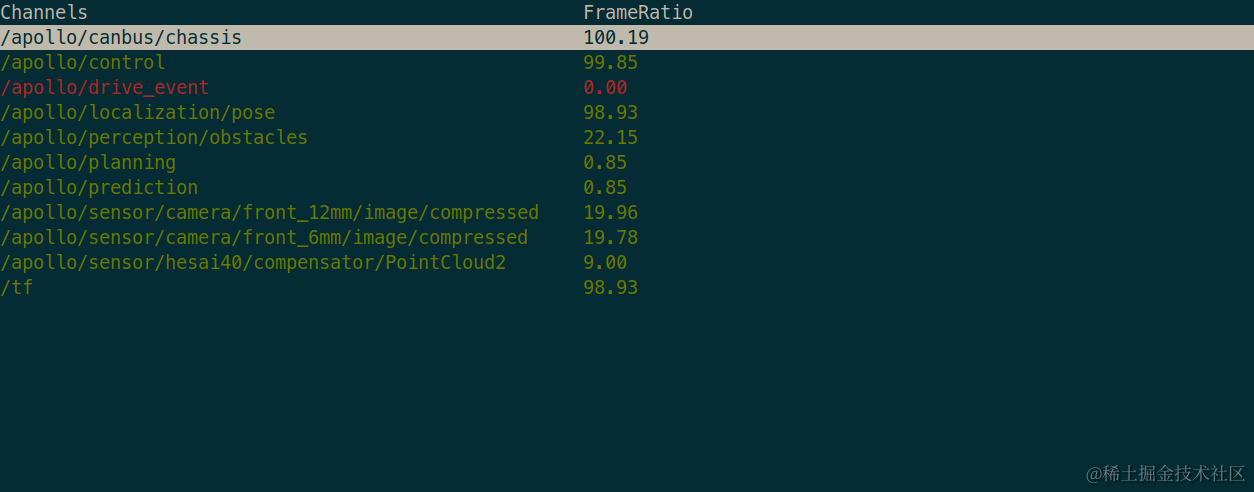
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 文章目录 ⛳️ 推荐引言一、Cyber RT 介绍二、常用术语1.1 运行 Cyber Monitor**1.
为什么Linux不是实时操作系统
linux为什么不是实时操作系统? 为了确保系统的实时性,即事件响应产生结果的时间准确性,可以将整个事件响应过程的延迟拆解为若干个组成部分如下。只有各个部分的响应时间都具有确定性,整体的响应时间才能得到保证。 而操作系统仅能保证系统层面时延,也就是完成实时任务的调度执行,至于你的实时任务执行时间确不确定,还取决于你的软件算法设计,然后输出计算或控制结果,即最后结果输出的确定性。 粉丝福利,
【原创】linux为什么不是实时操作系统
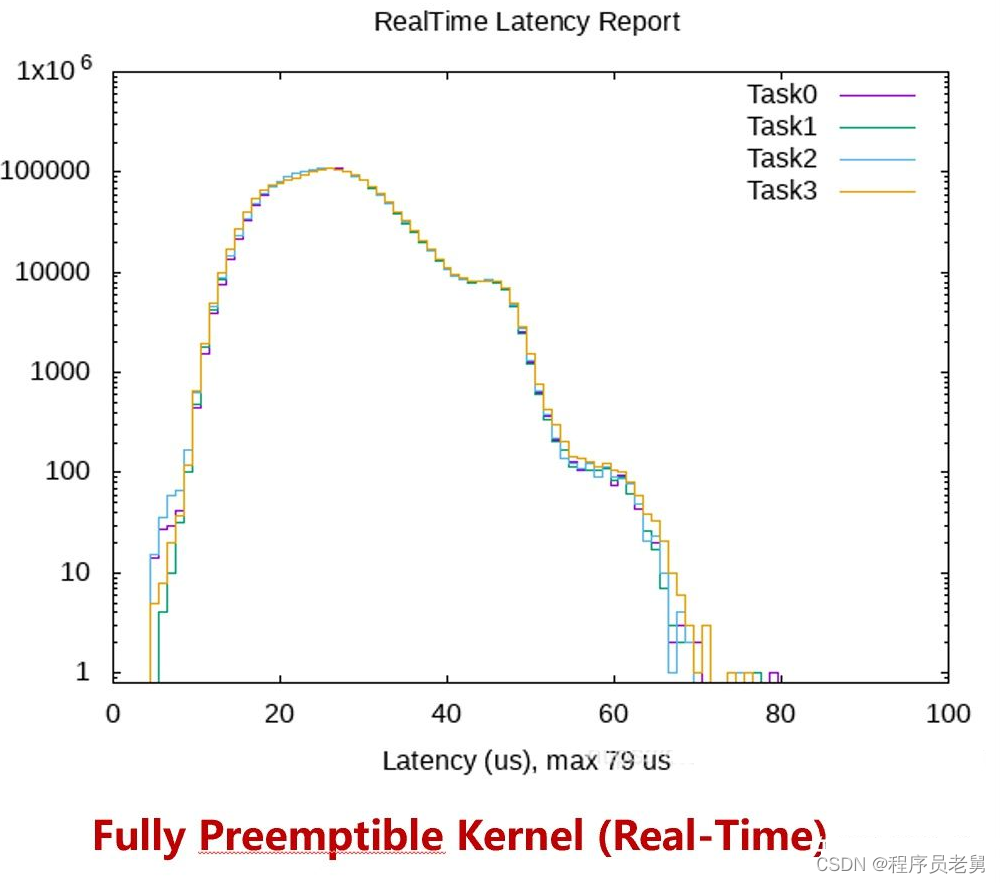
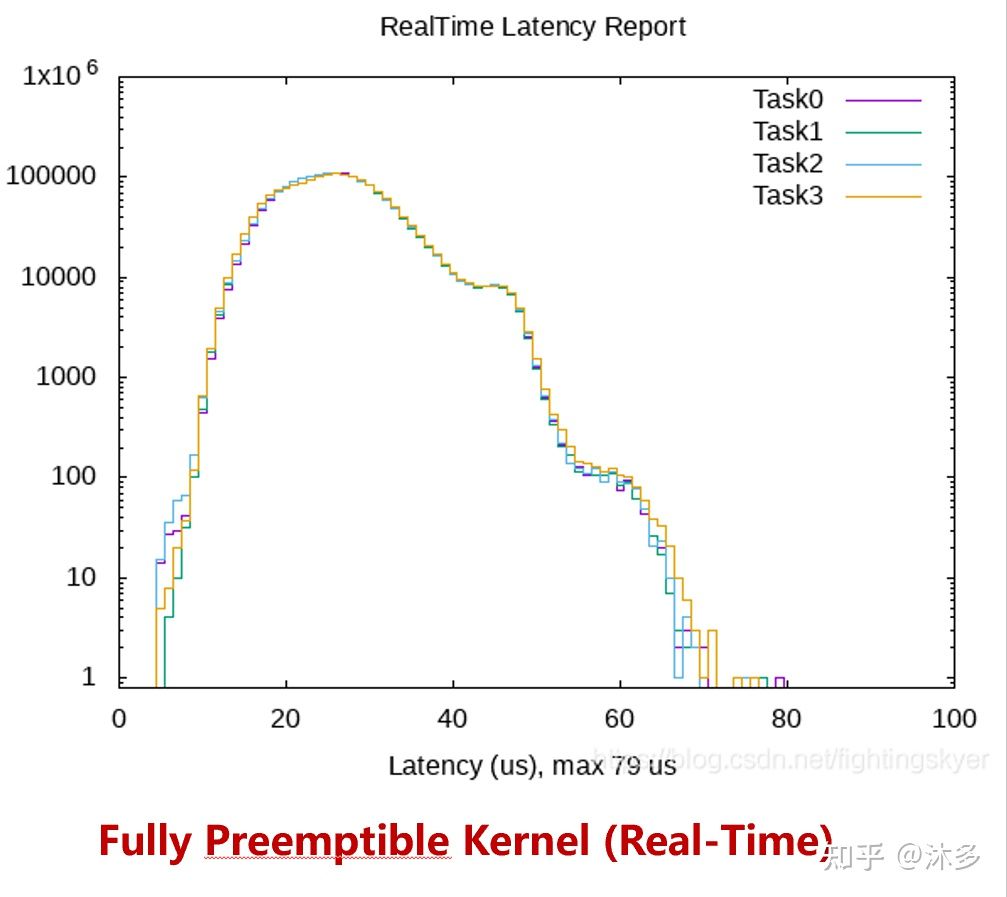
文章目录 一、什么是实时操作系统(RTOS)?二、linux为什么不是实时操作系统?中断响应时间中断处理时间任务调度时间1、No Forced Preemption(Server)2、Voluntary Kernel Preemption(Desktop)3、Preemptible Kernel(Low-Latency Desktop)4、Full Real Time Preemption(
C(C++)和Python实现STM32F4实时操作系统(FreeRTOS)吸尘器
Arm Cortex M 微控制器 STM32F4 通过 FreeRTOS 和 Mbed OS 实现的实时操作系统,使用了 C 语言(微控制器的“编程”语言)、C++语言和 MicroPython(允许在微控制器上使用 Python 语言)数字控制吸尘器。 STM32F4微控制器 STM32F4微控制器不能单独使用,除非为其构建专用开发或特定板。 作为早期学习者,我们的最佳选择是使用可用的 3
基于RTOS(实时操作系统)的CMT液晶屏控制器驱动程序开发与实现
RTOS(实时操作系统)提供了一种有效的方式来管理和调度多任务系统,对于液晶屏控制器的驱动程序开发来说,RTOS能够提供良好的实时性和可靠性。本文以RTOS为基础,设计并实现了一个用于控制CMT液晶屏的驱动程序。在设计过程中,我们首先介绍了液晶屏和RTOS的基本概念和工作原理。然后,我们详细讨论了RTOS的任务管理、消息传递和同步机制,并根据实际情况分析了CMT液晶屏控制的需求。在此基础上,我们设
嵌入式实时操作系统的设计与开发——移植内核
什么是移植内核?移植内核就是将已在某一特定CPU(或SOC芯片)上运行的RTOS内核在另一CPU上运行起来。 移植大部分是和硬件相关,需要针对具体CPU或芯片进行有区别的代码编写。 aCoral的移植包括两个部分:一是硬件抽象层(Hardware Abstraction Layer,HAL)移植,二是项目移植。 硬件抽象层(HAL)移植是针对不同目标板改写相关代码。 不同开发板的硬件资源不一样
FreeRTOS 实时操作系统第九讲 - 链表 (数据结构)
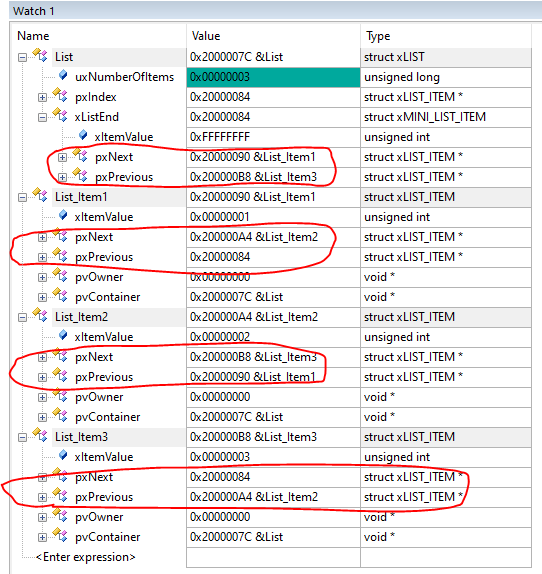
一、链表简述 链表是一种物理存储单元上非连续、非顺序的存储结构,数据元素的逻辑顺序是通过链表中的指针链接次序实现的。链表由一系列节点(链表中每一个元素称为节点)组成,节点可以在运行时动态生成。每个节点包括两个部分:一个是存储数据元素的数据域,另一个是存储下一个节点地址的指针域。 链表作为 C 语言的一种基础数据结构,在平时写程序中用得并不多,但在操作系统中使用得非常多。如果需要读懂 F