安川专题

安川机器人MA1440减速机维修方法
一、安川机械臂减速器维修方法 1. 齿轮磨损维修 对于轻微磨损的齿轮,可以通过重新调整啮合间隙来恢复性能。对于严重磨损的齿轮,需要更换新安川MA1440机械手齿轮箱齿轮。 2. 轴承损坏维修 对于损坏的轴承,需要更换新的轴承。在更换过程中,注意保持清洁,避免异物进入。 3. 箱体变形维修 对于变形的箱体,需要根据变形程度采取不同的维修方法。轻微变形可以通过矫正修复,严重变形需要更换新安川弧焊机器人

YASKAWA安川机器人DX100轴板维修故障细节分享
随着科技的日新月异,机器人在工业生产中扮演的角色愈发重要。而作为机器人的“大脑”——电路板,其稳定运作对整个系统的可靠性至关重要。面对可能出现的YASKAWA安川机器人DX100轴板故障,如何快速、准确地诊断问题并予以解决呢?下面将和大家探讨一下安川机械手主板故障诊断流程和预防保养。 一、YASKAWA机械手DX100轴板故障诊断流程 1. 观察与初步测试 - 开启机器人电源前后,检查电路板
Yaskawa安川伺服电机如何选型
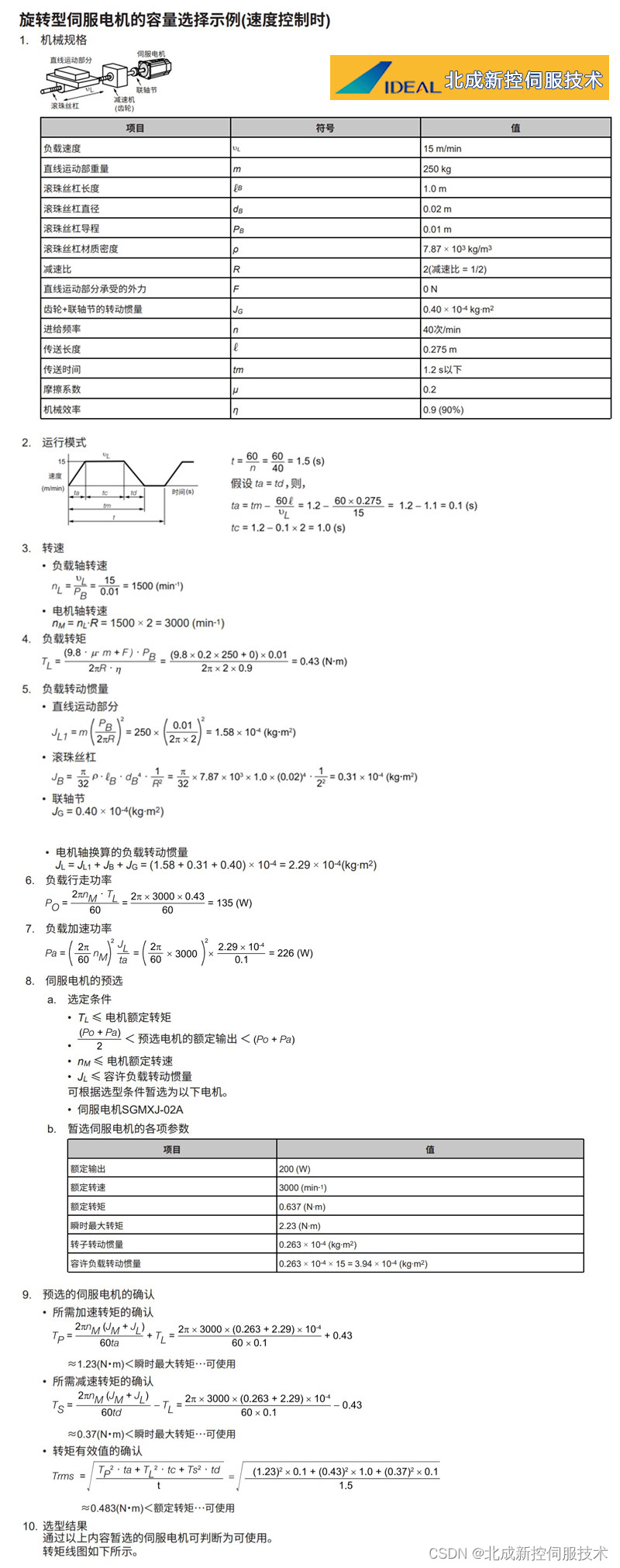
伺服电机在自动化领域产品中扮演着重要角色,通常用于项目中较精确的速度或位置控制部件的驱动。在面临多样化的选型需求时,如何正确选择合适的伺服电机成为一项重要任务。下面我们将分享一些经验,以帮助您快速选取适用的伺服电机。 按伺服电动机使用电源性质不同,可分为直流伺服电机和交流伺服电机。 接下来,我会使用安川同步伺服电机来介绍一个简单的选型流程。 1.在进行选型计算之前,需要首先确定机构末
YASKAWA安川机器人冷知识
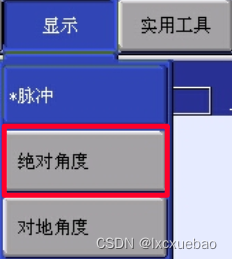
安川机器人编辑、管理、安全模式口令: 安川机器人示教器界面截图: 安川机器人查看当前位姿位置及切换: 安川机器人查看当前关节位置显示为角度: 1 、【菜单】-【设置】-【功能有效设定】-【全轴角度显示功能】中设定为有效。 2、 在【机器人】-【当前位置】界面中点击【显示】-【绝对角度】
科技创新领航 ,安川运动控制器为工业自动化赋能助力
迈入工业4.0时代,工业自动化的不断发展,让高精度运动控制成为制造业高质量发展的重要技术手段。北京北成新控伺服技术有限公司作为一家集工业自动化产品销售、系统设计、开发、服务于一体的高新技术企业,其引进推出的运动控制产品一直以卓越的性能和可靠的技术,享誉业内。其中,安川运动控制器能够实现精确的轨迹规划和姿态控制,提高机器人的运动性能和稳定性。具有高精度、快速响应、稳定可靠的优势,在高精度制造和加工领

YASKAWA安川伺服电机的特点、应用与养护
安川伺服电机是一种高精度、高效率的电机设备,其在现代工业自动化生产中扮演着重要的角色。 一、安川伺服电机工作原理 安川伺服电机的核心是电机和伺服控制器。伺服控制器通过检测电机转速和位置等反馈信息,精确控制电机的旋转速度、位置和力矩等参数。而这种精准的控制方式,又可以使机器人和自动化设备在各种复杂环境中更加灵活和高效地工作。 二、安川伺服电机的特点 1.安川伺服电机具有高精度运

abb安川伺服控制环路增益调整及惯量匹配使用技巧
伺服驱动器包括三个反馈环节:位置环、速度环、电流环。最内环(电流环)的刷新速度最快,中间环节(速度环)的刷新速度高于最外环(位置环)的刷新速度。如果不遵守此设计原则,将会造成电机运转的震动或反映不良。伺服驱动器的设计中要确保电流环具备良好的闭环刷新性能,提高伺服响应特性,一般伺服系统允许用户对位置环、速度环的增益等参数进行调整。 速度环增益 增大速度环比例增益,则能降低转速波动的变化

3分钟轻松实现网关网口远程监控安川PLC
EG网关网口连接安川PLC 目录 EG网关网口连接安川PLC 一. 准备工作 1.1 在对接前我们需准备如下物品 1.2 EG20网关准备工作 1.3 PLC准备工作 1.4 添加MEMOBUS协议 二. EMCP平台设置 2.1 新增EG设备 2.2 远程配置网关 2.3 网关绑定 2.4 通讯参数设置 2.5 创建设备驱动 2.5.1 添加变量 2.6 报警信息设