奥比专题

奥比中光Astra RGBD ROS1配置(乐视RGBD)
早年买了一款乐视RGBD一直落灰,最近做一个机器人项目想重新使用起来。发现官方给的RGBD包和github上面的ros_astra_camera包并不能很好的驱动这款相机。研究了一下进行补足。 最终的结果是彩色,红外以及深度退昂均能实时读取。具体过程如下: 安装配置 安装依赖 sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS
奥比中光Astra SDK相机SDK openni相机成像原理
目录 1.1 成像原理简介 1.1.1 结构光 1.1.2 双目视觉 1.1.3 光飞行时间TOF 2.使用手册 参考网址 2.1 产品集成设计 2.2 SDK介绍与使用 2.3 常用API介绍 OPENNI API 2 OpenNI类(OpenNI.h) 1.1 成像原理简介 1.1.1 结构光 结构光,英文叫做 Structured light,通常采用特
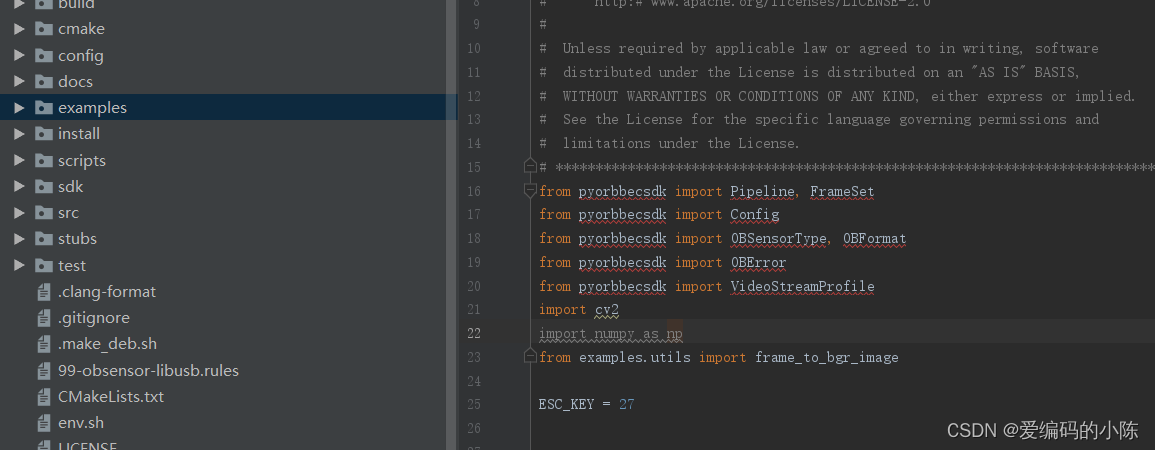
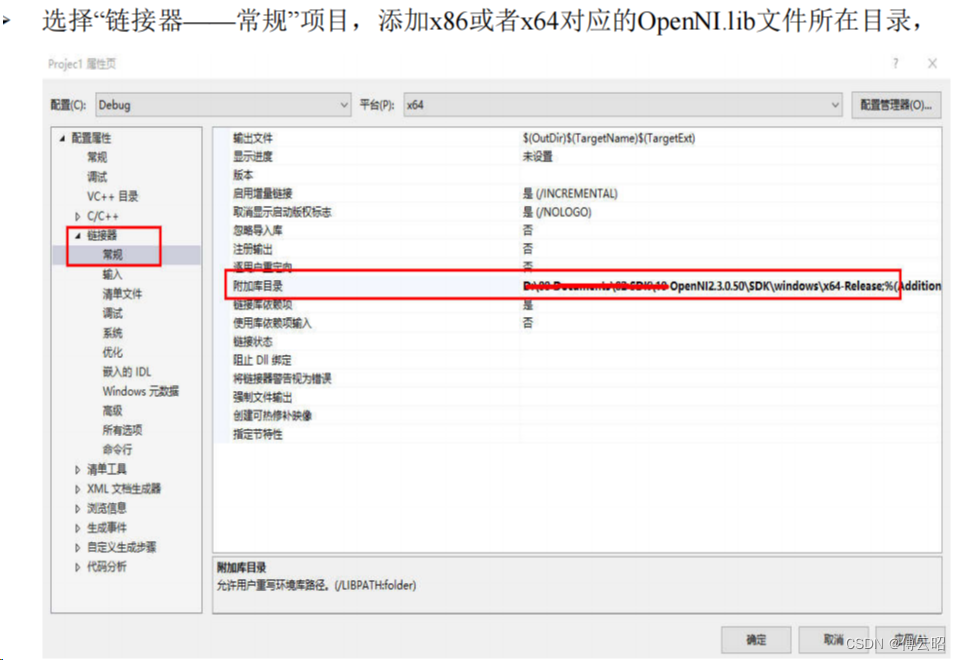
pyorbbecsdk奥比中光python版本SDK在Windows下环境配置笔记
1、概述 Orbbec SDK Python Wrapper基于Orbbec SDK进行设计封装,主要实现数据流接收,设备指令控制。 2、系统要求 2.1、操作系统 Windows:Windows 10 (x64)(本文 针对windows)Linux: 18.04/20.04/22.04 (x64)Arm32: 18.04/20.04/22.04Arm64: Ubuntu

奥比中光 Femto Bolt相机ROS配置
作者: Herman Ye @Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: @Auromix 是一个机器人爱好者开源组织。 注2: 由于笔者水平有限,以下内容可能存在事实性错误。 注3: 本文中直接引用各包官方
奥比中光 Femto Bolt相机ROS配置
机械臂手眼标定详解 作者: Herman Ye @Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: @Auromix 是一个机器人爱好者开源组织。 注2: 由于笔者水平有限,以下内容可能存在事实性错误。 注3:
【奥比中光Gemini 2L快速上门】
奥比中光Gemini 2L快速上手 目录 奥比中光Gemini 2L快速上手@[TOC](目录) 一、下载配置环境1.1 官网下载SDK1.2 配置环境 二、测试2.1 在bin中运行示例2.2 配置cmake 三、CMAKE3.1 CmakeLists.txt中各设置的意义 一、下载配置环境 1.1 官网下载SDK 进入官网,下载名字中带Gemini2L的SDK。 1.2 配置
在ROS2中使用奥比中光(ORBBEC)的AstraPro深度相机
文章目录 0.效果演示及注意事项0.1.效果演示0.2.注意事项 1.下载SDK2.拷贝至自定义目录3.安装各种库4.编译项目5.启动相机节点6.启动rviz26.1.显示深度图6.2.显示彩色图6.3.显示点云6.4.显示着色后的点云6.4.1.RGB与DEPTH没有对齐的原因分析 7.结语 0.效果演示及注意事项 0.1.效果演示 如下图所示,在rviz2中显示彩色图、深

奥比中光Linux配置报错
anaconda环境下 在虚拟机Ubuntu中配置OpenNI_v2.3.0.85_20220615_1b09bbfd_linux_x64_release.zip 报以下错误: /usr/bin/ld: warning: libpng12.so.0,needed by /hone/melodic/下载/samples/sanples/SimpleViewer / ../ThirdParty

实测 (二)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图
开发环境:NX+Ubuntu18.04+ROS-melodic 接着上篇,开始orb-slam2稠密回环建图 二、NX + D435i + ORB-SLAM2 稠密回环建图 先上效果图 这里感谢大神提供一个可回环的稠密地图版本: https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git 2.1 安装依赖(和orb-s

用奥比深度相机扫描一个非常平的平面,为什么深度值会出现厘米级的误差?
编辑整理自 || 3D视觉开发者社区 ✨如果觉得文章内容不错,别忘了三连支持下哦😘~ 用奥比深度相机扫描一个非常平的平面,出现了4个毫米的误差。 这个误差是如何产生的?是应为相机平面与我给定的平面存在倾斜造成的?还是相机本身精度造成的? 运算代码如下: #include <iostream>#include <vector>#include "OpenNI.h"#includ