双臂专题

双臂复合机器人平台叠方块例程使用与自启设置
睿尔曼双臂升降复合机器人平台,旨在为机器人教育提供强大的实训平台,该平台全自主研发,实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供开放式的软件框架,为教学和科研提供平台支撑。 平台集成了移动底盘、深度视觉、语音模块、超轻量仿人机械臂、五指灵巧手、两指夹爪等各种仿人功能设备。同时在移动底盘上安装了超声波、激光雷达、视觉传感器
人形机器人进展:IEEE Robotics出版双臂通用协同机械手操作架构
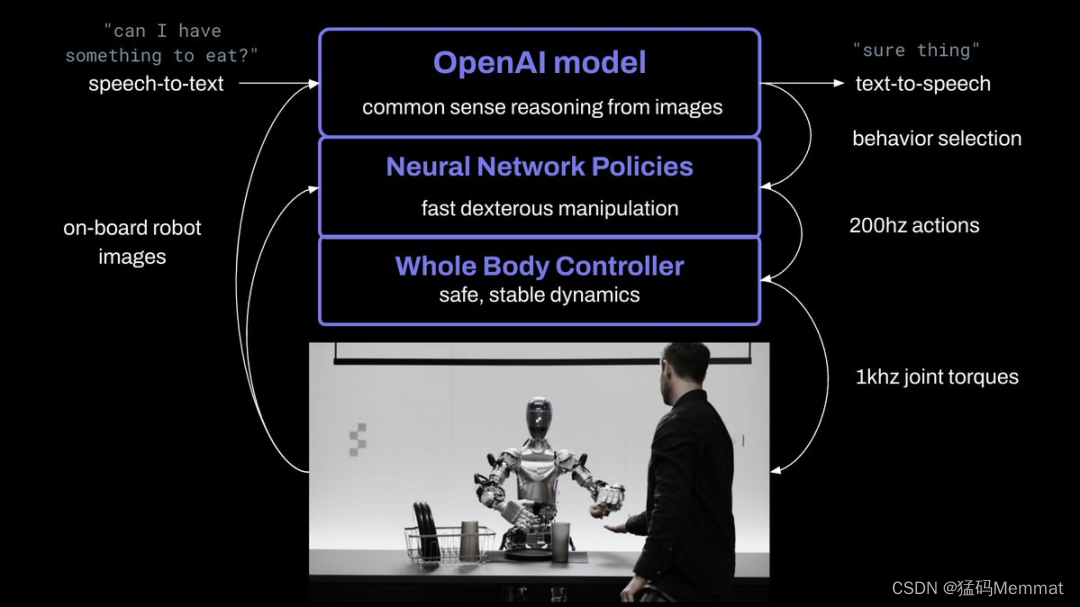
文章目录 1. Main2. My ThoughtsReference彩蛋a. OpenAI 投资: 人形机器人公司 Figure AIb. 人工智能软件工程师 Devin 上线 1. Main 图1 人居环境下的人形双臂机器人系统 通用人形机器人 作为近年来机器人与AI交叉领域的研究热点和技术竞争高地,因其具备在 非结构化人居环境 中承担各种琐碎家务的潜力而得到广
qt-双臂SCARA机器人动画
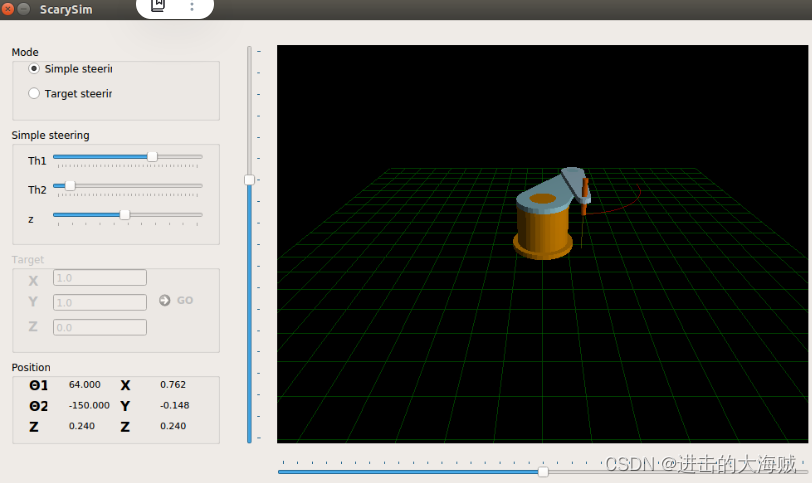
qt-双臂SCARA机器人动画 一、演示效果二、核心程序三、下载链接 在Qt + opengl中完成的双臂SCARA机器人的简单模拟。 一、演示效果 二、核心程序 #include "glwidget.h"#include <GL/glu.h>GLWidget::GLWidget(QWidget *parent) :QGLWidget(parent),pitch(30

谷歌 DeepMind 联合斯坦福推出了主从式遥操作双臂机器人系统增强版ALOHA 2
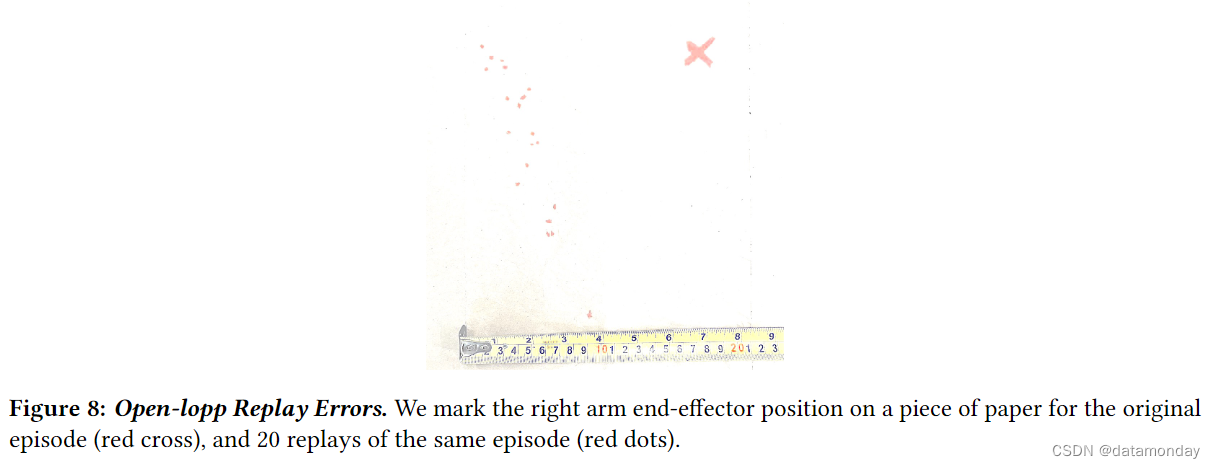
谷歌 DeepMind 联合斯坦福推出了 ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的性能、人体工程学设计和稳健性,且成本还不到 20 万元人民币。并且,为了加速大规模双手操作的研究,ALOHA 2 相关的所有硬件设计全部开源了,并提供了详细的教程,以及具有系统识别功能的 ALOHA 2 MuJoCo 模型。谷歌 DeepMind 放出了相关论文《ALOHA
【EAI 007】Mobile ALOHA:一个低成本的收集人类示教数据的双臂移动操作硬件系统
论文标题:Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation 论文作者:Zipeng Fu, Tony Z. Zhao, Chelsea Finn 作者单位:Stanford University, UC Berkeley, Meta 论文原文:https://arx

ABB YuMi协作式双臂机器人进入工厂,极大缓解劳动力短缺问题
原创 | 文 BFT机器人 日本SUS公司是一家为汽车和其他制造业提供铝框架和压铸铝部件的知名供应商,近年来,由于全球供应链面临严重中断,该公司希望能够寻找一家自动化供应商来帮助其恢复日本静冈县的产品生产。SUS公司表示,由于生产过程的重复性,加上日益严重的劳动力短缺,使得他们很难招募和留住足够的工人。 通过部署一系列ABB YuMi双臂协作机器人,该公司目前

matlab机械臂工作空间代码_Matlab双臂机器人建模仿真
源码随后附上,稍安勿躁 实际上,如果就把双臂中的每个臂当做单个的机械臂进行规划,那么用matlab进行双臂建模就没有太大必要,只需要对每个单臂进行单独规划即可。但是,如果涉及到双臂之间的协同轨迹规划,如上图所示,这时用matlab进行双臂建模仿真就会显得事半功倍。本文先只介绍双臂在matlab中的正运动学建模,后续会补充在matlab中如何进行双臂轨迹规划。 PUMA560构型双
超火的双臂烹饪机器人Project YORI,分分钟成为你的专属大厨!
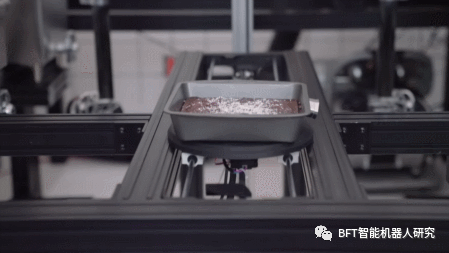
原创 | 文 BFT机器人 当前行业内有两种通用的烹饪自动化方法:一种是“制造一个可以在普通厨房中运作的烹饪机器人,因为每个人都有厨房”,这听起来很不错,但接下来你就必须使你的烹饪机器人能够在厨房环境中正常运行,这是相当难以实现的。另一种方法是“制造一个专用的自动化烹饪系统,因为自动化系统比机器人更容易实现”,这似乎也是个好主意,但你不得不在食谱、口感和味道方面妥协,因为通过

痛失双臂者仍能透过大脑控制机械义肢
本文转载至:http://cn.engadget.com/2014/12/19/double-amputee-mind-controlled-robot-arms/?ncid=rss_truncated 因意外截肢的身障人士应该会对此消息燃起希望,因为一个由 DARPA 资助的 机械臂 项目让他们可以以 思考 操作双臂,因为一名在去年夏天失去双臂的男子 Les Baug