倾角专题

如何保养大倾角挡边带
大倾角挡边带是车辆外部的一个重要保护装置,对车辆在行驶中遇到障碍物时起到保护作用。因此,保养大倾角挡边带是非常重要的,这样可以延长其使用寿命,保持其良好的外观和功能。 首先,定期清洁大倾角挡边带是很重要的。在洗车时,要使用洗车水和软刷,彻底清洁大倾角挡边带表面的污垢和灰尘。避免使用化学清洁剂,因为这可能对挡边带表面造成损害。 其次,要定期检查大倾角挡边带是否有裂纹或破损。如果发现任何问题,立即
大倾角挡边带的材料有哪些选择
大倾角挡边带(也称为大坡度挡边带)是用于道路边缘的一种特殊类型的挡边带,它被设计用于陡峭的斜坡或山地道路,以减少交通事故的发生。选择大倾角挡边带的材料应考虑以下几个因素: 1. 高强度材料:大倾角挡边带需要承受较大的车辆冲击力和侧向力,因此需要选用高强度的材料,如钢材、混凝土或纤维增强材料等。 2. 防腐材料:由于大倾角挡边带常常暴露在恶劣的气候条件下,如雨水、雪、冰等,因此需要选用具有良好耐

fan-shaped hole的孔倾角越大,流量系数是越大还是越小?
在涉及带有孔倾角的“fan-shaped hole”(扇形孔)的情况中,孔倾角对流量系数的影响取决于几个因素,包括喷孔的设计、流动的特性以及周围环境的压力条件。扇形孔通常用于气体涡轮发动机的冷却,其中孔倾角(即喷孔与表面法线的夹角)是关键参数之一。 **孔倾角增大时的影响:** 1. **流量系数增加**:较大的孔倾角可以减少喷孔入口处的流体阻塞,从而允许更多的流体通过喷孔。这通常意味着随着孔
课题学习(二)----倾角和方位角的动态测量方法(基于磁场的测量系统)
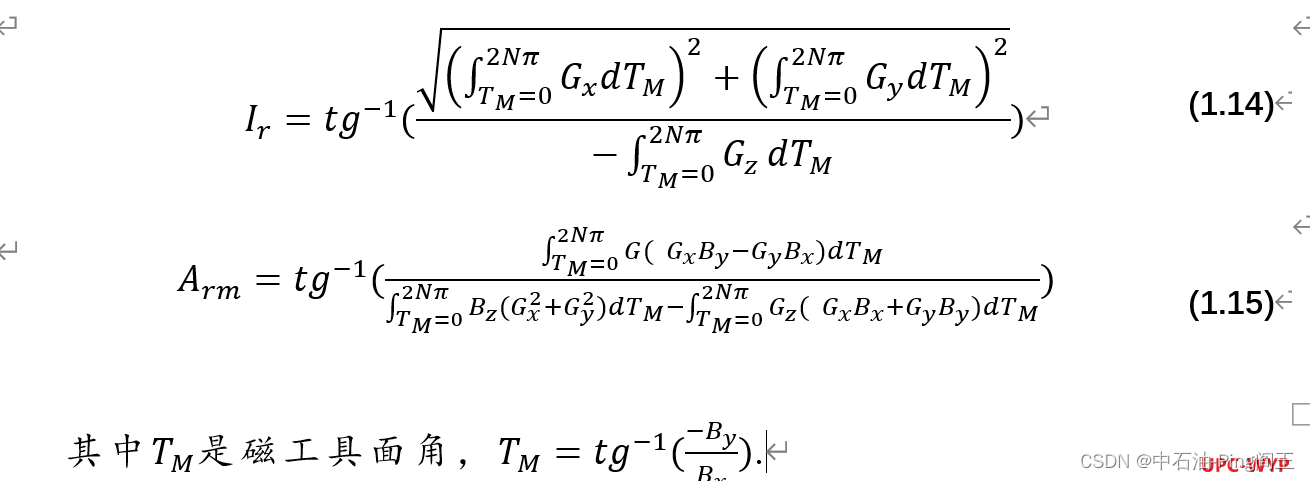
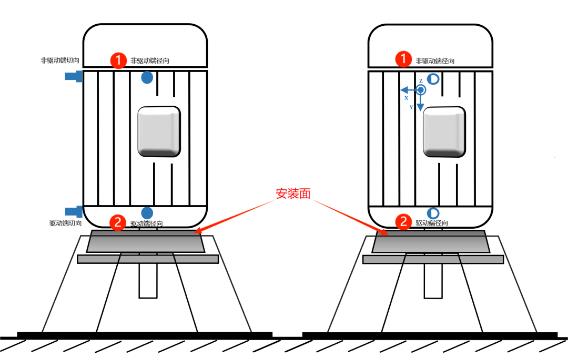
磁性测量工具安装在非磁性钻铤内,如图1,以避免磁性随钻测量工具测量时受到外部干扰。 测量系统采用三轴加速度计和三轴磁通门,并采用冗余设计,由于井下振动剧烈,陀螺仪的可靠性将大大降低。为了保证整个钻井过程中系统的可靠性,我们只以陀螺仪的测量信号作为参考。采用非磁性钻铤将电子测量仪器与上下钻柱的磁场分开,防止传感器处地球磁场的畸变。 当*钻柱旋转时,静态测量的公式不再适用 *。当传感器安装在旋转钻柱的

CG-70B 双轴普及型倾角传感器
产品概述 一款双轴普及型数字型(RS485)倾角传感器,其产品分辨率为0.01°,采用塑料外壳,防护等级为IP66,可用来系统与准确地测量水平角度的变化状况。 功能特点 ★ 抗外界电磁干扰能力强、能承受大冲击震动,是工业级别的传感设备; ★ 具有显著的负载能力和非常好的冲击耐久性,而不需要附加其他器件; ★ 可以调节输出频率,内置零位调整,可以根据要求定制零位调整按钮,从而实现在一定的角

大倾角(波状挡边)带式输送机
1、介绍 大倾角(波状挡边)带式输送机主要适用于散装物料的高倾斜连续输送。带有波纹侧板和隔板的输送带,传动角为0〜90°。该系列产品广泛用于煤炭,食品,建材,化工,农业,港口,冶金等行业。大倾角(波状挡边)带式输送机可以运输散装物料或包装产品,例如石头,沙子,煤炭,混凝土,水泥,砾石,肥料,矿石,石灰石,焦炭,锯末,木屑,散装物料,谷物,玉米片,炭黑,具有结构简单,维修方便,占地面积小,节省投资(

BWS2000倾角传感器c++测试代码_时间延迟与时间同步问题【3】
详见昨天做的测试代码,代码网址:BWS2000倾角传感器c++测试代码【2】-CSDN博客文章浏览阅读268次,点赞7次,收藏8次。倾角传感器测试与编写思路https://blog.csdn.net/m0_47489229/article/details/135128748 问题一:新的问题出现---存在时间延缓的问题 昨天的代码今天打开之后,再进行测试出现了一个问题,就是当移动倾角传感器
BWS2000倾角传感器c++测试代码
使用瑞芬的倾角传感器配置的时候,数据手册一下就配置好了,但是BWS2000倾角传感器总是出错,这里进行一下记录出现的问题与解决方式。 1.初步测试 在配置BWS2000倾角传感器读取帧数据的时候,总是出现一个问题,就是进行输出的时候,得到的数据与实际设置的频率并不是不一致的。 其中,command_R1是对于输出频率的设置,command_R2是对于波特率的设置,command_R3保存设置命

CG-70A 双轴高精度倾角传感器准确测量水平角度的变化状况
产品概述 一款双轴高精度数字型(RS485)倾角传感器,其产品分辨率为0.0001°,采用铝合金外壳,防护等级为IP67,可用来系统与准确地测量水平角度的变化状况。 功能特点 ★ 抗外界电磁干扰能力强、能承受大冲击震动,是工业级别的传感设备; ★ 具有显著的负载能力和非常好的冲击耐久性,而不需要附加其他器件; ★ 可以调节输出频率,内置零位调整,可以根据要求定制零位调整按钮,从而实现

wyler水平仪维修WYLER倾角仪维修CH-8405
瑞士WYLER电子水平仪维修;BIueCLINO倾斜度测量仪维修;wyler电子倾角仪维修。 水平仪常见故障及处理方法 1、 仪表通电不工作。 A、检查仪表220V电源端子接线是否正确 B、检查仪表电容是否熔断; C、拧下仪表后的固定螺钉,将表芯从前面抽出,检查电源板的电缆与主板间是否插接好 2、 液晶背光亮,但无字符和曲线显示。 检查仪表显示电缆是否联接正常。 3、通道不进数

共聚焦显微镜尖锐倾角形貌测量能力,让复杂结构清晰明了
共聚焦显微镜其尖端的倾角形貌测量功能能清晰呈现复杂结构的细节,在形貌测量方面具有显著优势。 在微纳检测领域,共聚焦显微镜具有的纳米级别纵向分辨能力,在相同物镜放大的条件下横向分辨率更高,能够清晰地展示微小物体的图像形态细节,显示出精细的细节图像。共聚焦显微镜依托弱光信号解析算法可以完整重建出近70°陡峭的复杂的结构形状,如对太阳能电池片微观结构进行三维形貌重建: VT6000共聚焦显微
倾角传感器安装位置篇
倾角传感器又称作倾斜仪、测斜仪、水平仪、倾角计,经常用于系统的水平角度变化测量,水平仪从过去简单的水泡水平仪到现在的电子水平仪是自动化和电子测量技术发展的结果。作为一种检测工具,它已成为桥梁架设、铁路铺设、土木工程、石油钻井、航空航海、工业自动化、智能平台、机械加工等领域不可缺少的重要测量工具。电子水平仪是一种非常精确的测量小角度的检测工具,用它可测量被测平面相对于水平位置的倾斜度、两部件相互平行

相机倾角影响下比例因子的计算
在相片表面和物体表面平行时,可以根据上式计算。 dknown为物体表面的已知物理长度,Iknown为图像平面的像素长度,D为距离,f为焦距,dpixel为像素长度。 但是以上公式是针对相机倾角为0是的计算公式,当测量距离较远时,小幅度的相机倾角可能会被忽略。 以下是含有相机倾角时比例因子的计算公式: 其中Xa和Xb可以根据公式计算出来,Ia和Ib是图像平面上的像素坐标,Xai=Iai*dp
课题学习(八)----卡尔曼滤波动态求解倾角、方位角
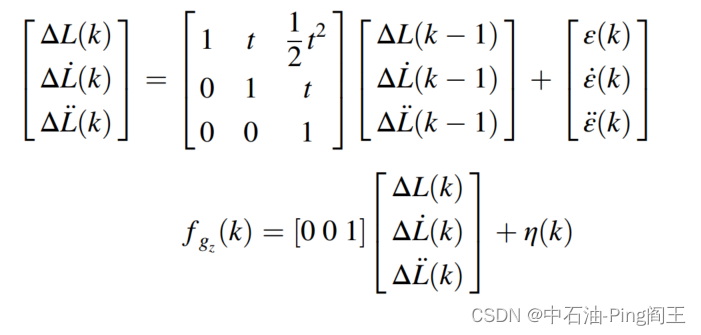
一、 卡尔曼滤波 卡尔曼滤波的应用要求系统和底层过程的测量模型都是线性的。离散时间线性状态空间系统的描述为: x k = Φ k , k − 1 x k − 1 + G k − 1 w k − 1 x_k=\Phi_{k,k-1}x_{k-1}+G_{k-1}w_{k-1} xk=Φk,k−1xk−1+Gk−1wk−1 式中 Φ k , k − 1 \Phi_{k,k-1}

倾角传感器应用于摩天轮吊舱调平
无锡咏为传感科技有限公司是一家设计、制造、销售为一体的倾角传感器类产品供应商,产品广泛应用于角度测量、平台监测、激光调平、安防控制等领域。现介绍一种应用于摩天轮安全控制方面的技术方案,图片均实拍与施工现场。 1、设计需求 摩天轮转动过程中,受到风力、惯性等因素的影响,轿厢会摆动,影响客户体验,同时,如果偏转角度过大,会有一定的危险性,引入倾角传感器,实时
课题学习(三)----倾角和方位角的动态测量方法(基于陀螺仪的测量系统)
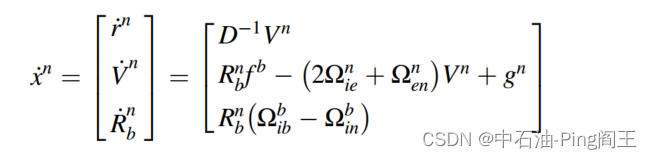
一、内容介绍 该测量系统基于三轴加速度和三轴陀螺仪,安装在钻柱内部,随钻柱一起旋转,形成捷联惯性导航系统,安装如下图所示: 假设三轴加速度和陀螺仪的输出为: f b = [ f x f y f z ] T f^b=\begin{bmatrix}f_{x} & f_{y} &f_{z} \end{bmatrix}^T fb=[fxfyfz]T w b = [ w x w y