位姿图专题
【Vins轨迹】pose_graph位姿图加载EVO精度评定
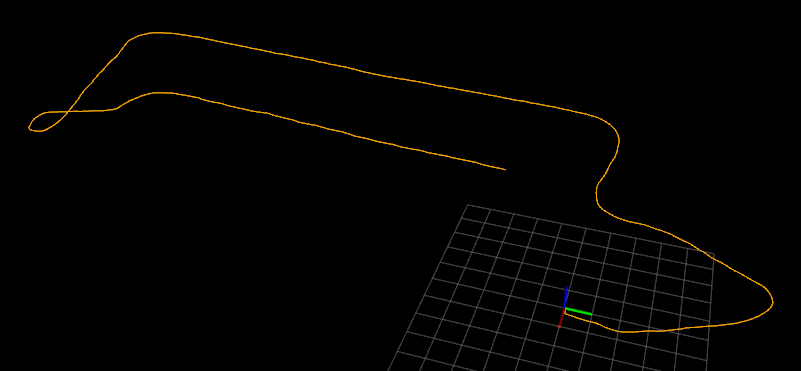
1. Vins的位姿图加载功能 如果想要对slam运行后的位姿轨迹进行评定,需要将数据保存到output文件夹中。 其中pose_graph.txt含有的信息:关键帧id、时间戳、vio的xyz、优化后的xyz、vio的四元数、优化后的四元数、回环到的关键帧id、回环信息(8个)、特征点数量。 其中数据是和vins_no_loop.txt以及vins_loop.txt中的数据是一致的。 v

VINS-MONO翻译以及理论推导系列(四):VIII全局位姿图优化、IX实验结果
VIII. 全局位姿图优化 重新定位后,局部滑动窗口移动并与过去的姿态对齐。利用重定位结果,提出此位姿图优化步骤以确保将过去姿势的集合登记为全局一致配置。 由于我们的视觉惯性设置使滚动和俯仰角完全可观测,累积漂移只发生在四个自由度(x,y,z和偏航角)。为此,我们忽略了对无漂移的滚

《视觉 SLAM 十四讲》V2 第 10 讲 后端优化2 简化BA 【位姿图】
文章目录 第10讲 后端210.1 滑动窗口滤波 和 优化10.1.2 滑动窗口法 10.2 位姿图10.3 实践: 位姿图优化本讲 CMakeLists.txt 10.3.1 g2o 原生位姿图 【Code】10.3.2 李代数上的位姿优化 【Code】 习题10题1 【没推完】 LaTex 第10讲 后端2 滑动窗口优化 位姿图优化【简化的BA】 带IMU 紧耦合 的优