中是专题

Objective-C中是如何实现线程同步的? 网络的同步、异步区别
多线程在各种编程语言中都是难点,很多语言中实现起来很麻烦,objective-c虽然源于c,但其多线程编程却相当简单,可以与java相媲美。这篇文章主要从线程创建与启动、线程的同步与锁、线程的交互、线程池等等四个方面简单的讲解一下iphone中的多线程编程。 一、线程创建与启动 线程创建主要有二种方式: 当然,还有一种比较特殊,就是使用所谓的convenient
ES6中是如何实现模块化
前端模块化的理解 前端模块化是一种将复杂代码按功能的不同划分成不同模块进行单独维护和管理的开发方式。这种方式旨在提高开发效率、降低维护成本,并增强代码的可重用性、可读性和可维护性。模块化的核心思想是将系统分割成多个独立的功能部分,每个部分(模块)都封装了自己的实现细节,只对外暴露必要的接口,从而使得各个模块之间可以相互独立地开发和测试,同时又能通过接口进行通信和协作。 在前端开发中,模块化带来

为什么 String 在 Java 中是不可变的?
我最喜欢的 Java 面试问题,很棘手,但同时也非常有用。一些面试者也常问这个问题,为什么 String 在 Java 中是 final 的。 字符串在 Java 中是不可变的,因为 String 对象缓存在 String 池中。由于缓存的字符串在多个客户之间共享,因此始终存在风险,其中一个客户的操作会影响所有其他客户。例如,如果一段代码将 String “Test” 的值更改为 “TEST”,
RAII在实现webserver这个项目中是怎么体现的?起到了什么作用
在WebServer项目中,RAII(Resource Acquisition Is Initialization,即资源获取即初始化)是一种重要的资源管理策略,它主要通过智能指针、锁、文件句柄等对象的生命周期来管理资源的分配和释放。RAII在WebServer项目中的体现和作用主要体现在以下几个方面: 1. 资源自动管理 RAII的核心思想是将资源(如内存、文件句柄、网络连接、锁等)的分配与

通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹 % 创建用于视觉化杯子的点[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);% 调整 Z 坐标的比例,使其符合杯子的高度Z

vector对象在内存空间中是如何增长的
vector对象在内存空间中是如何增长的 我们都知道vector对象是动态存储的,从这一点看有点像链表,可以动态的增加或减少元素。我们也知道链表中是有指针变量,专门用于存储上一个和下一个元素的地址。正是因为这两个指针的存在,我们才能做到动态的存储数据,即不用像数组那样必须事先申请好空间。链表的缺点就是不能够快速的随机访问其中元素,必须通过指针层层查找。 但是,vector既可以实现动态存储数
Java 的多线程和并发处理,在项目中是如何使用它?
在Java开发中,多线程和并发是我们经常需要处理的问题。它们能够让我们的应用在完成一些耗时任务的同时,仍然保持对用户的响应,提高了应用的性能和用户体验。接下来,让我们来详细地了解一下Java中的多线程和并发处理。 Java中的多线程 在说到多线程之前,我们首先要了解什么是线程。线程是操作系统能够进行操作调度的最小单位,它被包含在进程之中,是进程中的实际操作单位。在Java语言中,一次程序运
Spring源码中是如何使用设计模式六大原则的
设计模式的六大原则,通常指的是SOLID原则,它们是面向对象设计中用于提高代码可维护性、灵活性和可扩展性的五个指导原则,学习六大原则,可以让你的代码变得高级而优雅,今天的内容 V 哥结合 Spring源码中如何运用六大原则来具体讲解,希望能给你带来帮助: 单一职责原则(Single Responsibility Principle, SRP):一个类应该只有一个引起它变化的原因。开闭原则(Ope
汽车行驶中是怎么保障轴瓦安全的?
汽车轴瓦是一种用于减少摩擦和支撑转动部件的关键零部件,通常用于发动机的曲轴、凸轮轴等转动部件上。主要作用是减少转动部件之间的摩擦,支撑和保护曲轴、凸轮轴等旋转部件,确保它们在高速旋转时的稳定性和耐用性。 在汽车轴瓦加工过程中,人工检测员必须敏锐感知,并立即对产品质量作出判断,确保不会将瑕疵品送到消费者手中。然而,生产线速度越快,产品越复杂,缺陷越模糊,人工检测员很难满足生产效率需
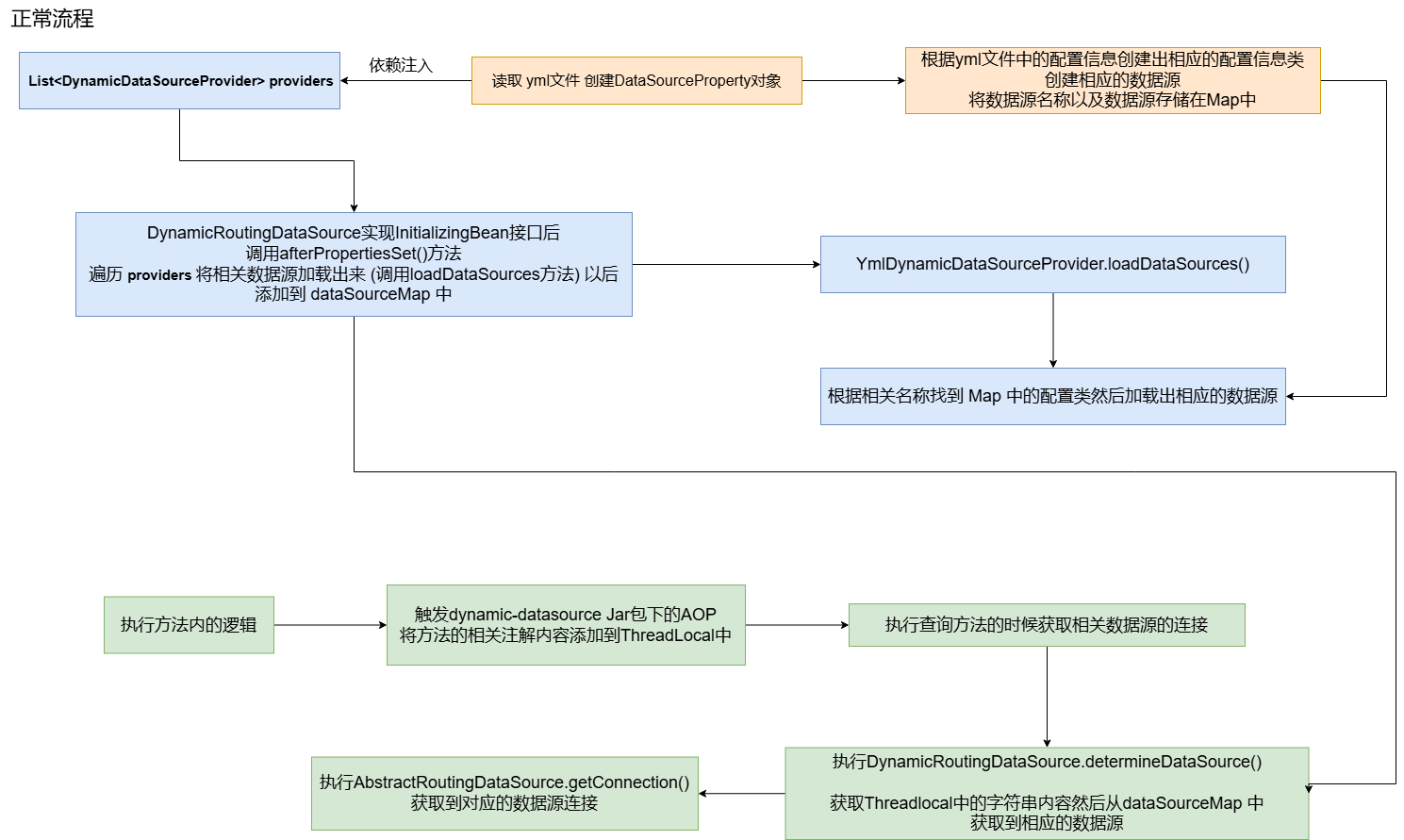
阅读源码解析dynamic-datasource-spring-boot-starter中是如何动态切换数据源的
dynamic-datasource-spring-boot-starter是苞米豆提供的一个动态切换数据源的工具,可以帮助企业或者个人实现多数据源的切换,这里通过阅读源码的方式解析是如何动态的切换数据源的,采用的版本是3.5.1 源码解析 通过官方文档可以看到,如果想要动态的切换数据源,就需要在类或者方法上加上@DS注解 加上这个注解以后通过aop就可以拦截且识别到dsName究竟是什
OnlyOwner在Solidity中是一个修饰符,TypeError:
目录 OnlyOwner在Solidity中是一个修饰符 TypeError: Data location must be "memory" or "calldata" for parameter in function, but none was given. function AddDOm (address dataOwnermAddress, string dataProduct,

大厂Java面试题:MyBatis中是如何实现动态SQL的?有哪些动态SQL元素(标签)?描述下动态SQL的实现原理。
大家好,我是王有志。 今天给大家带来的是一道来自京东的 MyBatis 面试题:MyBatis 中是如何实现动态 SQL 的?有哪些动态 SQL 元素(标签)?描述下动态 SQL 的实现原理。 MyBatis 中提供了 7 个动态 SQL 语句的元素(标签): trim 元素,用于在 MyBatis 映射器中实现 SQL 语句中前后字符串的处理;where 元素,用于在 MyBatis 映射
js中各种类型的变量在if条件中是true还是false
申明如下变量: var a, b=-1, c= 1, d= 0, e=null, f=undefined, g='', h=""; if(!a){ console.log('a='+a) } if(!b){ console.log("b="+b) } if(!c){ console.log("c="+c) } if(!d){ console.log("d="+d) } if

Javascript - 你在项目中是如何使用闭包的
难度级别:中高级及以上 提问概率:80% 很多初级开发者其实在日常工作中,很少有使用闭包的机会,但这却是一个非常高频的考点,因为对闭包不是特别了解,使用又少,久而久之,就觉得闭包是一个难点。在Javascript中,一个普通方法在执行完毕后,其内部的变量将不能再被访问,例如下面这个myFn方法,在方法执行完毕之后,其内部的nu
关于自定义控件在Visual Studio 2010的工具箱中是灰色(不可用)的解决办法
在最近的项目开发中开发了一些自定义控件,想要在网站项目中 使用,但是在添加到工具箱后发现,打开一个网页的设计视图后,工具箱里的自定义控件都是灰掉的, 从网上找原因,尝试各种方法都不行,后来决定重新建立一个网站项目,却发现可以使用了。通过对比网页代码发现没有差别,后来隔了一个周末后突然想到是不是部署的 网站.NET Framework版本不对。我把网站的.NET Framewor

Weex在苏宁移动办公开发中是如何实践的?
Weex 是什么? Weex 是一套简单易用的跨平台开发方案,能以 web 的开发体验构建高性能、可扩展的 native 应用,为了做到这些,Weex 与 Vue 合作,使用 Vue 作为上层框架,并遵循 W3C 标准实现了统一的 JSEngine 和 DOM API,打造三端一致的 native 应用。其架构如下所示: 将 weex 工程文件编译成 JS bundle,发布到云端,由客户
Android 手机 应用管理 中是如何获取到 应用信息的
Android对这种方法进行了封装,我们没有权限去调用这个方法,所以我们只能通过AIDL,然后利用Java的反射机制去调用系统级的方法。 下面上代码:(注释比较详细) ? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29

计算机内什么叫函数,【计算机内功心法】八:函数运行时在内存中是什么样子?...
在开始本篇的内容前,咱们先来思考几个问题。nginx 咱们先来看一段简单的代码: void func(int a) { if (a > 100000000) return; int arr[100] = {0}; func(a + 1); } 你能看出这段代码会有什么问题吗?程序员 咱们在以前的文章《高性能高并发服务器是如何实现的》一中提到了一项关键技术——协程,你知道协程的本质是什么吗?有的同

什么是依赖注入(Dependency Injection)?它在 C++ 中是如何实现的?
什么是依赖注入(Dependency Injection)?它在 C++ 中是如何实现的? 依赖注入(Dependency Injection,DI)是一种设计模式,用于减少软件组件之间的耦合度,提高代码的可测试性、可维护性和可扩展性。在依赖注入中,组件的依赖关系不是在组件内部创建或硬编码的,而是通过外部提供的方式注入到组件中。 实现方式: 在 C++ 中,依赖注入可以通过以下几种方式实现:
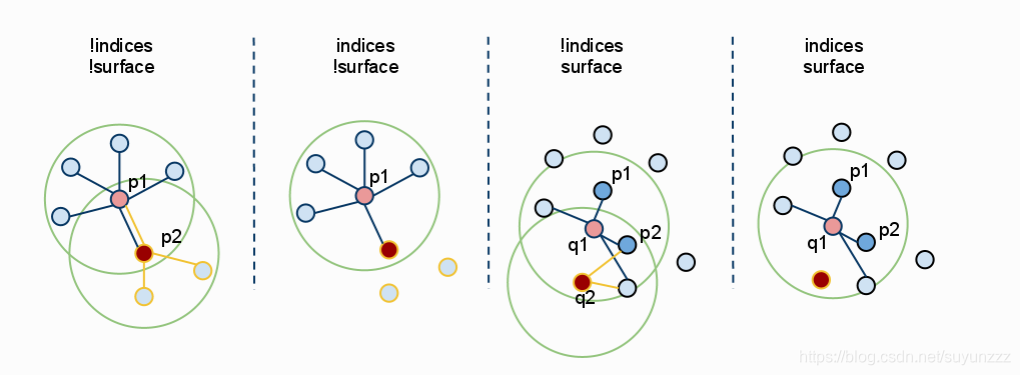
【PCL】pcl中是怎么计算特征的
目录 写在前面四种计算特征的方法1. !indices & !isurface2. indices & !isurface3. !indices & isurface4. indices & isurface 三个接口辨析1. setInputCloud(PointCloudConstPtr &)2. setIndices(IndicesConstPtr &)3. setSearchSurf
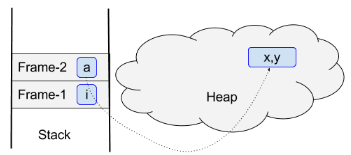
Java数组在内存中是什么样子的?
小伙伴们注意了! 小编在这里给大家送上关注福利: 转发本文,关注+私信小编“资料”即可领取小编精心准备的资料一份! 在Java中,数组存储原始值(int, char,…)或引用(a.k。 一个指针)到对象。 当使用“new”创建对象时,将在堆中分配内存空间并返回引用。 数组也是如此,因为数组是Java中的对象。 1. 一维数组 int[] arr只是对包含3个整数的数组的引用。 如

WPF 【十月的寒流】学习笔记(2):MVVM中是怎么实现通知的
文章目录 前言相关链接代码仓库项目配置代码初始代码ViewPersonViewModel 尝试老办法通知解决方案ObservableCollectionBindingListICollectionView 总结 前言 我们这次详细了解一下列表通知的底层是怎么实现的 相关链接 十月的寒流 MVVM实战技巧之:可被观测的集合(ObservableCollecti

【前沿技术杂谈:人机交互 】将人机交互 (HITL) 集成到机器学习应用程序中是必要的,而不是选择。
来源 — 照片由 安迪·凯利 on Unsplash @[TOC](【前沿技术杂谈:人机交互 】将人机交互 (HITL) 集成到机器学习应用程序中是必要的,而不是选择。) Machine Learning 机器学习 将人在环 (HITL) 集成到机器学习中是必要的,而不是选择。这是为什么? 要在机器学习中集成人机交互 (HITL),首先要了解 HITL、其需求、优势和方法。 什么
错误警告:self.result = depth > self.result ? depth : self.result这样在python中是错误的!!!!!
self.result = depth > self.result ? depth : self.result (×) 这是一个三元运算符(ternary operator)在Python中的使用。它的基本格式是: value_if_true if condition else value_if_false 在您给出的代码片段 self.result = depth > self.resul
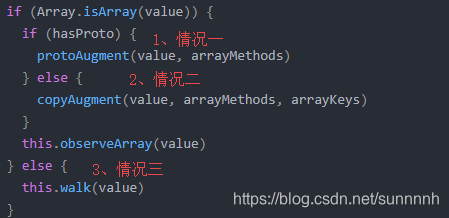
40、Vue 中是如何检测数组变化?
数组没有使用Object.defineProperty() 定义数组每项的setter和getter方法。 (1)问题:调用的数组的push、splice、pop等方法改变数组元素时并不会触发数组的setter,这就会造成使用上述方法改变数组后,页面上并不能及时体现这些变化,也就是数组数据变化不是响应式的。 (2)解决:vue重写了数组的push、splice、pop等方法。 1、重写