两片专题

Open3D 获取两片点云的公共重叠区域(24)
Open3D 获取两片点云的公共重叠区域(24) 一、算法介绍二、算法实现1.代码2.结果 一、算法介绍 要获取两片点云的公共重叠区域,使用以下步骤: 对每一片点云构建 KD 树。 遍历第一片点云的每一个点,并使用 KD 树在第二片点云中找到最近邻点。 通过比较最近邻点之间的距离与阈值来确定是否属于重叠区域。 将符合条件的点保存下来,即为两片点云的公共重叠区域。 二、
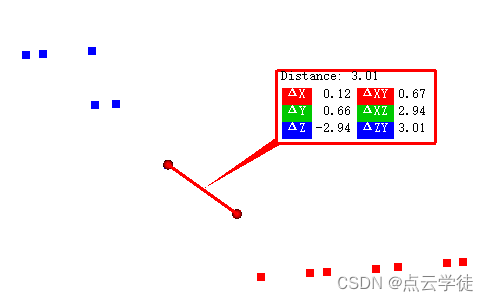
MATLAB 计算两片点云间的最小距离(2种方法) (39)
MATLAB 计算两片点云间的最小距离 (39) 一、算法介绍二、算法实现1.常规计算方法2.基于KD树的快速计算 一、算法介绍 假设我们现在有两片点云 1 和 2 ,需要计算二者之间的最小距离,这里提供两种计算方法,分别是常规计算和基于KD树近邻搜索的快速计算方法,使用的测试数据如下: 二、算法实现 1.常规计算方法 代码如下(示例): % 两组三维点云数据ptC


擎泰 USB3.0主控SK6221 +JS29F32B08JAME1_I2_DDR 两片 64G的U盘三驱三启
(已经将本文章发布到了数码之家上,开始遇到的问题数码之家的高手们给了解答,在此谢谢他们) 由于经常维护电脑,各种主板兼容的U盘启动也不一样。 于是在某宝买了两片擎泰 USB3.0主控(SK6221)和 两片intel颗粒(JS29F32B08JAME1_I2_DDR )做成了 64G的U盘,三驱三启。 开始焊接一个颗粒,为方便焊接发光二极管也取了下来,量产工具扫描到

PCL点云处理之从两片点云中获取具有匹配关系的同名点对 (二百一十八)
PCL点云处理之从两片点云中获取具有匹配关系的同名点对 (二百一十八) 一、算法介绍二、算法实现1.代码2.效果 一、算法介绍 点云配准的前提是,我们知道或者预测了一些匹配对,我们认为这些匹配对就是两片点云中的同名点,同名点就是由于激光扫描存在误差的关系,导致同一地物在两片点云中的位置存在一些偏差,代表同一位置的两个点即为同名点,当有多个这样的匹配点对时,我们就可以估计两片点云

阿里MQTT物联网平台“云产品流转”实战——两片ESP32通过物联网平台实现远程互操作
关键词:阿里,物联网,MQTT,ESP32,ARDUINO,云产品流转。 摘要:本文介绍了阿里MQTT物联网平台关于“规则引擎”中“云产品流转”设置方法,以及利用“云产品流转”消息转发机制,选用两片ESP32,使用ARDUINO软件编程实现MQTT设备远程互连互通。项目包含硬件说明、平台设置、ARDUINO代码及演示资料。 资源下载地址:阿里MQTT物联网平台“云产品流转”实战(设备间远程互操