yolov1专题

YOLOV1-V3详细介绍(新手向、超详细)
本文主要是根据我自己的学习情况来进行讲解,以一个初学者的角度进行阐释,如果有更深层次的点没有涉及到,还请大家多多包涵。 计算机视觉 主流算法 目标检测算法比较流行的算法可以分为两类: 一类是基于Region Proposal(候选区域)的R-CNN系算法(R-CNN,Fast R-CNN, Faster R-CNN),它们是t

Tiny_Yolov1_VOC2007目标检测
Tiny_Yolov1_VOC2007目标检测 相较于YOLO模型,Tiny_YOLO版本将网络压缩了许多,不管是训练还是移植速度都比较快,更加适用于业界应用。 文章目录 Tiny_Yolov1_VOC2007目标检测一、 Tiny_Yolov1结构二、VOC2007数据集上的训练过程三、模型检测效果四、深入思考五、源码六、相关链接 一、 Tiny_Yolov1结构 网络输入

经典目标检测YOLOV1理论基础的编码实现(通过编码理解原理)
目录 正文: 1、前期准备 1.1 创建目录结构 1.2 数据集介绍与下载 1.2.1 数据集介绍 1.2.1 数据集下载 1.3. 数据集处理 1.4. 构建数据加载器 1.4.1定义初始化方法 1.4.2 定义增强图片方法 1.4.3 定义编码器 1.4.4 完整代码 1.5、定义主函数 2构建网络 2.1 ResNet架构介绍 2.2 构建ResNet

【目标检测】原始的 YOLOv1 网络结构(GoogLeNet 作为 backbone 的实现)
现在看网上的很多 YOLOv1 的代码实现,基本都是使用新的 backbone,例如 ResNet 或者 VGG 来实现的,因为这些后面的通用的 backbone 可能比较方便的获得预训练模型,不需要从头开始训练。 但是我就是想看一下,一开始 YOLOv1 网络结构是咋样的,所以就当做学习了,来还原一下最初的 YOLOv1 网络结构。 比较常见的图有两张: 这张是原论文里面的图片,我后面根
YoLo进化史《A COMPREHENSIVE REVIEW OF YOLO: FROM YOLOV1 TOYOLOV8 AND BEYOND》
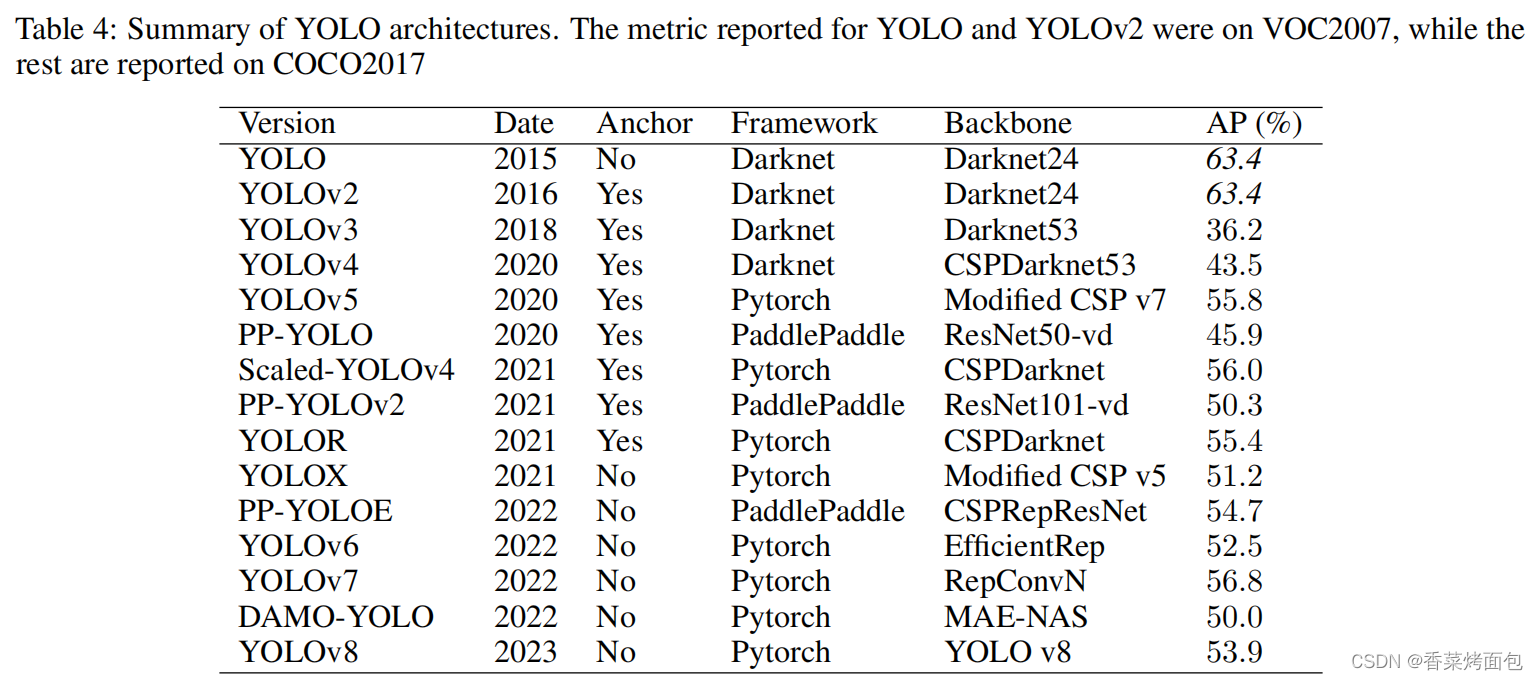
Abstract YOLO已成为机器人、无人驾驶汽车和视频监控应用的核心实时目标检测系统。我们对YOLO的发展进行了全面的分析,研究了从最初的YOLO到YOLOv8的每次迭代中的创新和贡献。我们首先描述标准指标和后处理;然后,我们讨论了网络架构的主要变化和每个模型的训练技巧。最后,我们总结了YOLO发展的重要经验教训,并对其未来发展进行了展望,强调了增强实时目标检测系统的潜在研究方向。 1 I
【全文翻译】YOLOv1:统一的实时目标检测
YOLO:统一的实时目标检测 摘 要 我们提出了YOLO,一种新的目标检测方法。以前的目标检测工作使用分类器来执行检测。相反,我们是将目标检测框架看作是一个从空间上分割边界框和相关的类别概率的回归问题。单个神经网络在一次评估中直接从完整图像预测边界框和类别概率。由于整个检测路线(pipeline 渠道;路线)是单个网络,因此可以直接在检测性能上进行端到端优化。 我们的统一架构非常快。我们的基础

深度学习||YOLO(You Only Look Once)深度学习的实时目标检测算法(YOLOv1~YOLOv5)
目录 YOLOv1: YOLOv2: YOLOv3: YOLOv4: YOLOv5: 总结: YOLO(You Only Look Once)是一系列基于深度学习的实时目标检测算法。 自从2015年首次被提出以来,YOLO系列不断发展,推出了多个版本,包括YOLOv1, YOLOv2, YOLOv3, YOLOv4, 和YOLOv5等。下面是对YOLO系列的详解: YOLOv
P1-YOLO学习1.1-YOLOV1
目录 一.YOLOV1 1.Abstract 2.Core 3.NetWork 4.Training 5.Experiments 6.WebNet 7.Innovation point 一.YOLOV1 1.Abstract
YOLO系列详解(YOLOV1-YOLOV3)
YOLO算法 简介 本文主要介绍YOLO算法,包括YOLOv1、YOLOv2/YOLO9000和YOLOv3。YOLO算法作为one-stage目标检测算法最典型的代表,其基于深度神经网络进行对象的识别和定位,运行速度很快,可以用于实时系统。了解YOLO是对目标检测算法研究的一个必须步骤。 目标检测思路 目标检测属于计算机视觉的一个中层任务,该任务可以细化为目标定位与目标识别两个任务,简单

解读YOLOv1-YOLOv8的原理与网络结构
目标检测——Yolo系列(YOLOv1/2/v3/4/5/x/6/7/8)_yolo目标检测_zyw2002的博客-CSDN博客 膜拜!YOLO目标检测竟被讲的如此简单!(完整版)YOLOv1-v8,草履虫都能听懂!这么好的课程还没人看?我不更了!!!_哔哩哔哩_bilibili YOLO V1 简介 【论文解读】Yolo三部曲解读——Yolov1 - 知乎 (zhihu.

论文笔记:YOLOv1
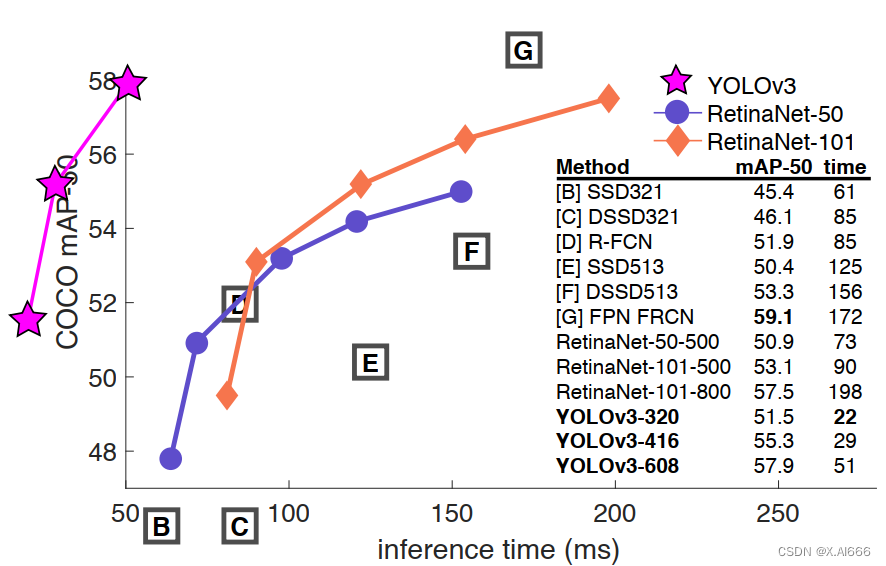
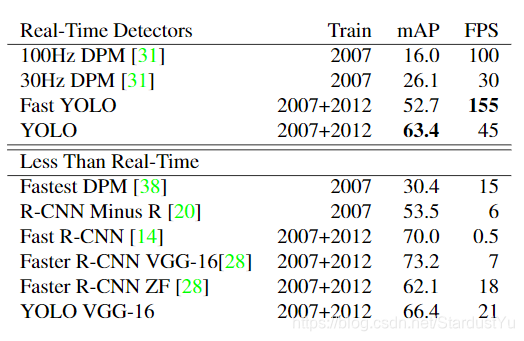
针对当前目标检测速度慢而无法做到实时检测的问题,作者提出了YOLO。YOLO直接将目标检测转化到回归问题上,直接用一张图片得到bounding box和类别。 作者提出YOLO的优点: 1、YOLO检测物体非常快。 因为没有复杂的检测流程,只需要将图像输入到神经网络就可以得到检测结果,YOLO可以非常快的完成物体检测任务。标准版本的YOLO在Titan X 的 GPU 上能达到45 FPS。更
目标检测(五)之YOLOv1
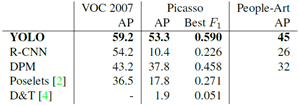
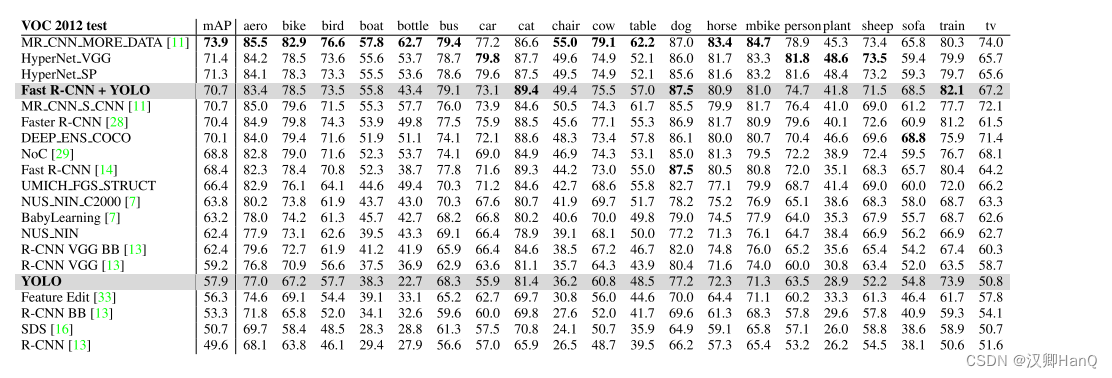
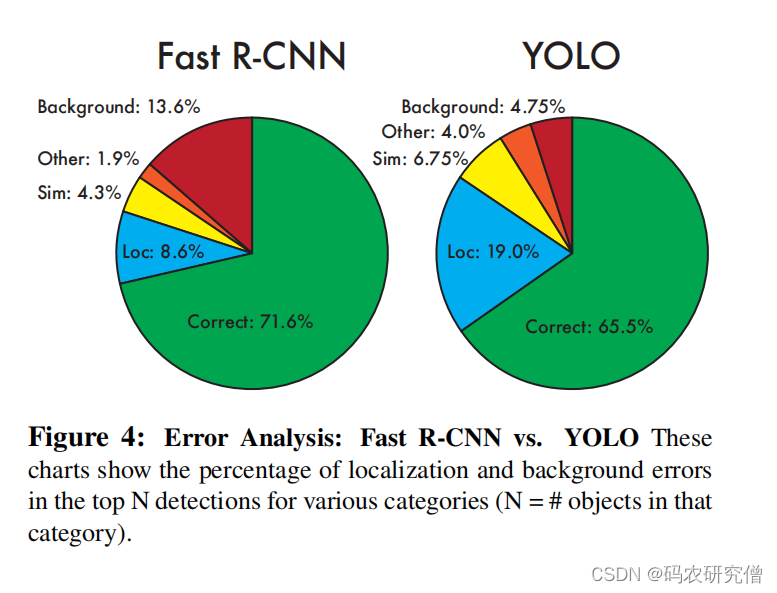
文章目录 一、论文相关信息 1.论文题目 2.论文时间 3.论文文献 4.论文源码 二、论文背景及简介三、知识储备 1、YOLOv1的思想 四、test阶段五、train阶段 1、Loss的确定 六、实验结果七、论文细节与思考 1、YOLO相比于RCNN系列对背景分类错误的更少,可以配合Faster RCNN一起使用 八、论文优缺点 优点 缺点 一、论文相关信


yolov1:背景介绍与算法精讲
目录 一、背景介绍1.1 yolo发展历史1.2 作者介绍 二、算法精讲2.1 预测阶段2.2 训练阶段 三、论文细节 一、背景介绍 其实在写这篇博客的时候yolov1~yolov8的所有网络结构以及算法思想和源码都已经研究很久了,回过头继续读v1会发现有很多细节是自己没有留意的,也算是对自己的学习进行总结了。 1.1 yolo发展历史 yolo最开始是在2015

经典目标检测YOLO系列(一)复现YOLOV1(5)模型的训练及验证
经典目标检测YOLO系列(一)复现YOLOV1(5)模型的训练及验证 之前,我们依据《YOLO目标检测》(ISBN:9787115627094)一书,提出了新的YOLOV1架构,继续按照此书进行YOLOV1的复现。 1 YOLOV1模型的训练 1.1 Yolov8Trainer类 作者为了代码具有更好的复用性,参考一些开源的工作单独实现了若干个训练所用的Trainer类。YOLOv1训练使
CV之DL之Yolo:计算机视觉领域算法总结—Yolo系列(YoloV1~YoloV8各种对比)的简介、安装、案例应用之详细攻略
CV之DL之Yolo:计算机视觉领域算法总结—Yolo系列(YoloV1~YoloV8各种对比)的简介、安装、案例应用之详细攻略 导读:近期,博主应太多太多的网友的私信,要求让博主总结一下目标检测领域算法的发展历史和最新算法的技术架构,尤其是Yolo系列这一块内容,网友私信的太多了,有可能是博主粉丝中计算机视觉方向的,尤其是搞视频监控这个领域的粉丝占了很大一部分的缘故吧。那么,为了满足广大
经典目标检测YOLO系列(一)复现YOLOV1(4)VOC2007数据集的读取及预处理
经典目标检测YOLO系列(一)复现YOLOV1(4)VOC2007数据集的读取及预处理 之前,我们依据《YOLO目标检测》(ISBN:9787115627094)一书,提出了新的YOLOV1架构,并解决前向推理过程中的两个问题,继续按照此书进行YOLOV1的复现。 经典目标检测YOLO系列(一)YOLOV1的复现(1)总体架构 经典目标检测YOLO系列(一)复现YOLOV1(2)反解边界框及后

yolov1, yolo v2 和yolo v3系列分析
目标检测模型主要分为two-stage和one-stage, one-stage的代表主要是yolo系列和ssd。简单记录下学习yolo系列的笔记。 1 yolo V1 yolo v1是2015年的论文 you only look once:unified,real-time object detection 中提出,为one-stage目标检测的开山之作。其网络架构如下:(24个卷积层和两个

经典目标检测YOLO系列(一)复现YOLOV1(3)正样本的匹配及损失函数的实现
经典目标检测YOLO系列(一)复现YOLOV1(3)正样本的匹配及损失函数的实现 之前,我们依据《YOLO目标检测》(ISBN:9787115627094)一书,提出了新的YOLOV1架构,并解决前向推理过程中的两个问题,继续按照此书进行YOLOV1的复现。 经典目标检测YOLO系列(一)YOLOV1的复现(1)总体架构 经典目标检测YOLO系列(一)复现YOLOV1(2)反解边界框及后处理

经典目标检测YOLO系列(一)复现YOLOV1(2)反解边界框及后处理
经典目标检测YOLO系列(一)复现YOLOV1(2)反解边界框及后处理 在上个博客,我们提出了新的YOLOV1架构,这次我们解决前向推理过程中的两个问题。 经典目标检测YOLO系列(一)YOLOV1的复现(1)总体架构 1、边界框的计算 1.1 反解边界框公式的改变 1.1.1 原版YOLOV1的中心点量化误差的计算公式 如下图,目标狗的中心点所在网格为黄色部分,中心点为图中红点。 在
【深度学习-目标检测】05 - YOLOv1 论文学习与总结
论文地址:You Only Look Once:Unified, Real-Time Object Detection 论文学习 1. 摘要 YOLO的提出:作者提出了YOLO,这是一种新的目标检测方法。与传统的目标检测方法不同,YOLO将目标检测视为一个回归问题,直接从图像像素到边界框坐标和类别概率的映射。方法特点: 统一的架构:YOLO使用单一的神经网络直接从完整图像中预测边界框和类
从YOLOv1到YOLOv8的YOLO系列最新综述【2023年4月】
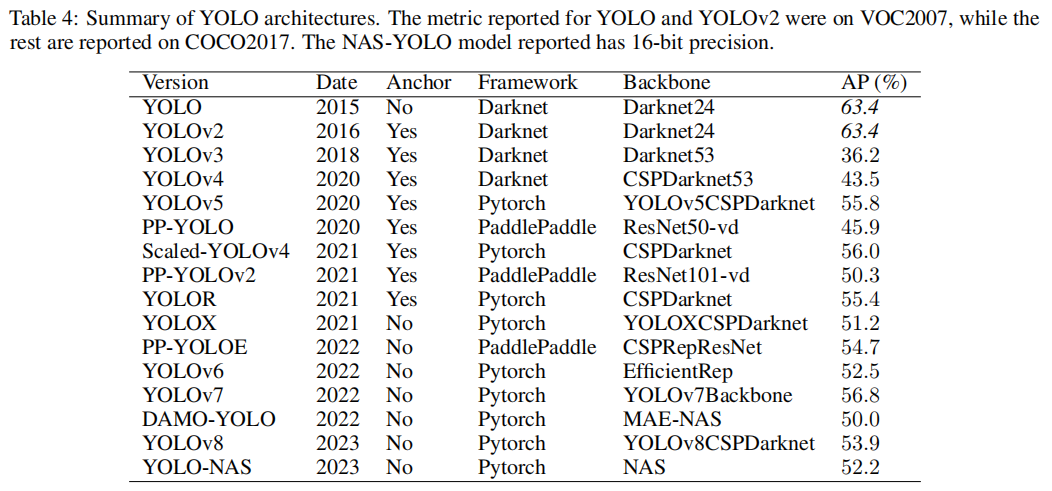
作者:Juan R. Terven 、Diana M. Cordova-Esparaza 摘要:YOLO已经成为机器人、无人驾驶汽车和视频监控应用的核心实时物体检测系统。我们对YOLO的演变进行了全面的分析,研究了从最初的YOLO到YOLOv8每次迭代的创新和贡献。我们首先描述了标准指标和后处理;然后,我们讨论了每个模型的网络结构和训练技巧的主要变化。最后,我们总结了YOLO发展的基本经验,并
pytorch:YOLOV1的pytorch实现
pytorch:YOLOV1的pytorch实现 注:本篇仅为学习记录、学习笔记,请谨慎参考,如果错误请评论指出。 参考: 动手学习深度学习pytorch版——从零开始实现YOLOv1 目标检测模型YOLO-V1损失函数详解 3.1 YOLO系列理论合集(YOLOv1~v3) 代码仓库:https://gitee.com/wtryb/yolov1-pytorch-implement 模型权重
YOLO的全面综述:从YOLOv1到最新版本
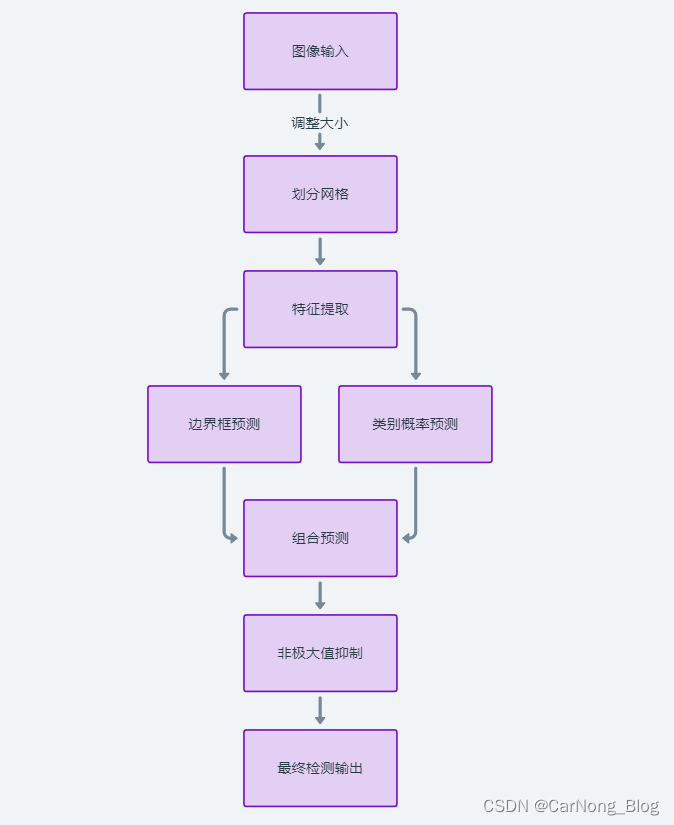
文章目录 摘要1、简介2、YOLO在不同领域的应用3、目标检测的度量标准和非最大值抑制(NMS)3.1. AP如何工作?3.2. 计算AP3.3、非极大值抑制(NMS) 4、YOLO: You Only Look Once4.1、YOLOv1的工作原理4.2、YOLOv1架构4.3、YOLOv1训练4.4、YOLOv1的优点和限制 5、YOLOv2:更好、更快、更强5.1、YOLOv2体系结

【YOLOv1】的那点事儿
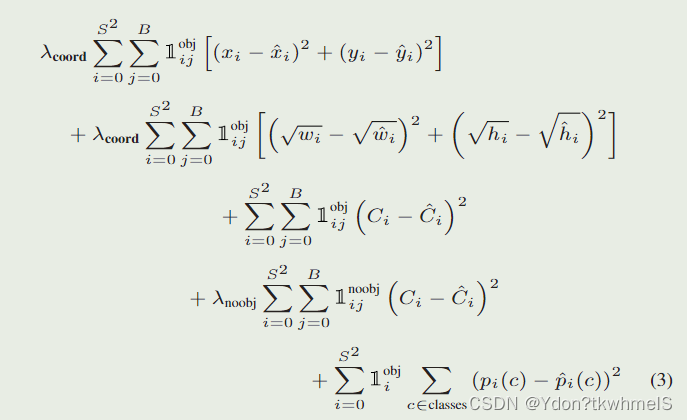
本文主要记录YOLOv1的重要知识点、研读论文时产生的疑问问题及解决过程。 本文出现的图片和部分文字源于网络,侵删~~ 文章目录 1. YOLOv1重要知识点总结2. YOLOv1算法原理介绍3. YOLOv1网络结构图4. YOLOv1损失函数5. YOLOv1存在缺点6. 解决问题 1. YOLOv1重要知识点总结 输入图像尺寸:448×448将图片分成7×7个网格(
You Only Look Once: Unified, Real-Time Object Detection(Yolov1) 论文详细解读
目录 前言1. 简介2. 思想设计3. 模型设计3.1 网络3.2 训练3.3 预测 4. 实验结果 前言 研究目标检测相关的论文,将其文章梳理总结如下 对应的ppt展示可看我这资源:You Only Look Once: Unified, Real-Time Object Detection 目标检测主要分为两类 Region Proposal的R-CNN系(R-CNN、F