xtdrone专题
一、基于xtdrone的仿真无人机学习:定点飞行 (用ego_planner
参考三维运动规划 · 语雀 零·基础知识 MAVROS(MAVLink to ROS)是一个ROS(Robot Operating System)节点,用于在ROS系统中与PX4飞控系统进行通信。 它通过将MAVLink消息转换为ROS消息,实现了ROS系统与无人机之间的数据交换和控制。 在PX4 SITL(Software-in-the-Loop)仿真环境中,无人机模型通过PX4飞控
xtdrone用键盘控制无人机飞行 无法起飞
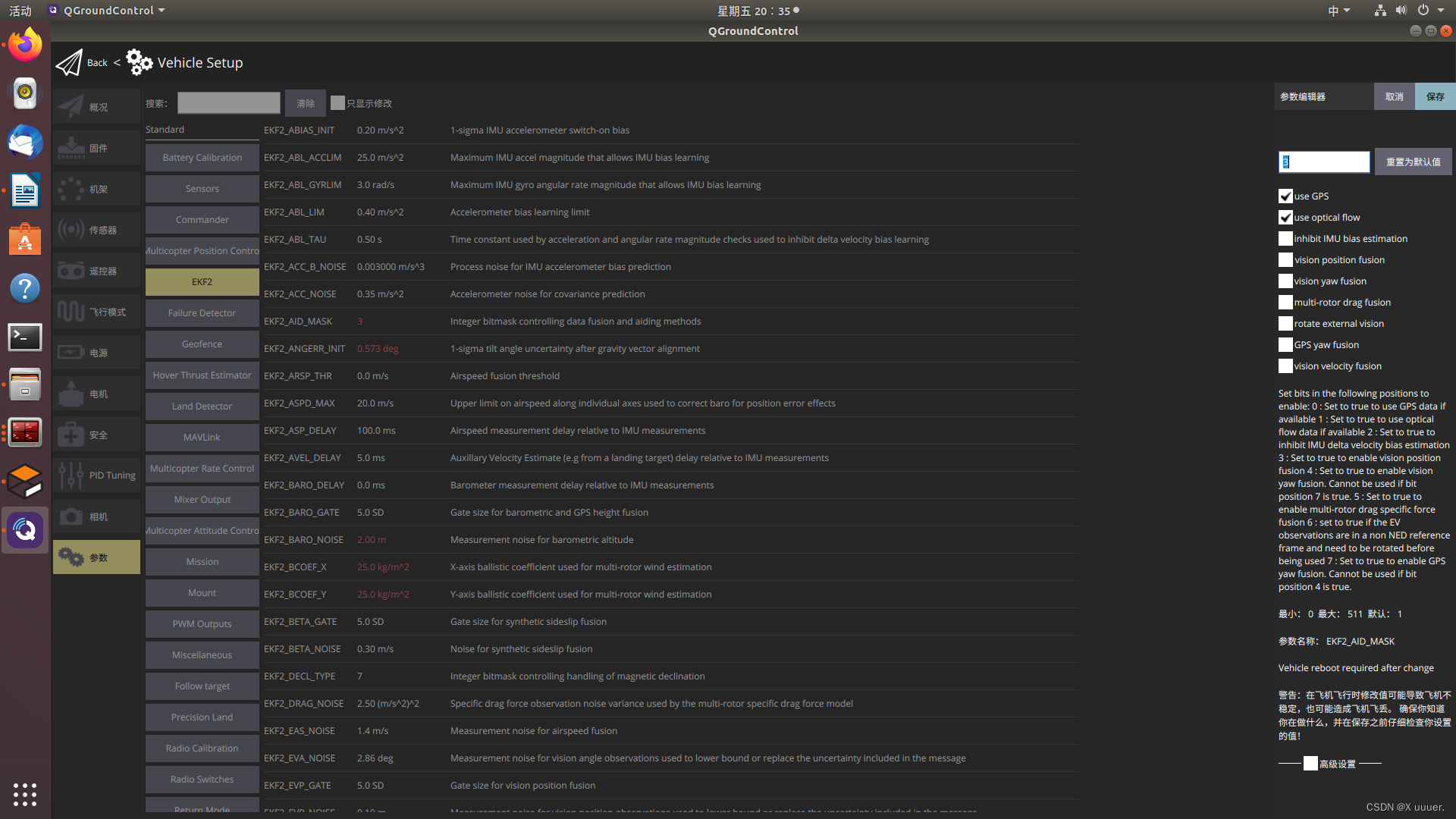
运行案例 解锁无人机螺旋桨转动但无法起飞 也未报错 解决方法: 在QGC中修改:PX4飞控EKF配置 将PX4使用的EKF配置为融合GPS的水平位置与气压计高度。 如果我们想使用视觉定位,就需要把修改配置文件。 此修改意味着EKF融合来自mavros/vision_pose/pose的数据,并不是修改完无人机就可以视觉定位了,需要相关程序提供mavros/vision_pose

原来XTDrone也可以用Docker部署!!!!那这样就不用担心环境问题了啊,GAAS也有docker
原来XTDrone也可以用Docker部署!!!!那这样就不用担心环境问题了啊,这让我想起之前GAAS也是说准备出个docker版本,更正一下,GAAS也出了docker的,刚刚看以前的博文看到的。 https://blog.csdn.net/sinat_16643223/article/details/107609073 我感觉普罗米修斯也可以弄一个docker版本,我之前也这么想

XTDrone也是主要利用offborad模式,板载计算机给飞控发送期望运动
https://www.yuque.com/xtdrone/manual_cn/vehicle_config https://blog.csdn.net/sinat_16643223/article/details/114042279 。

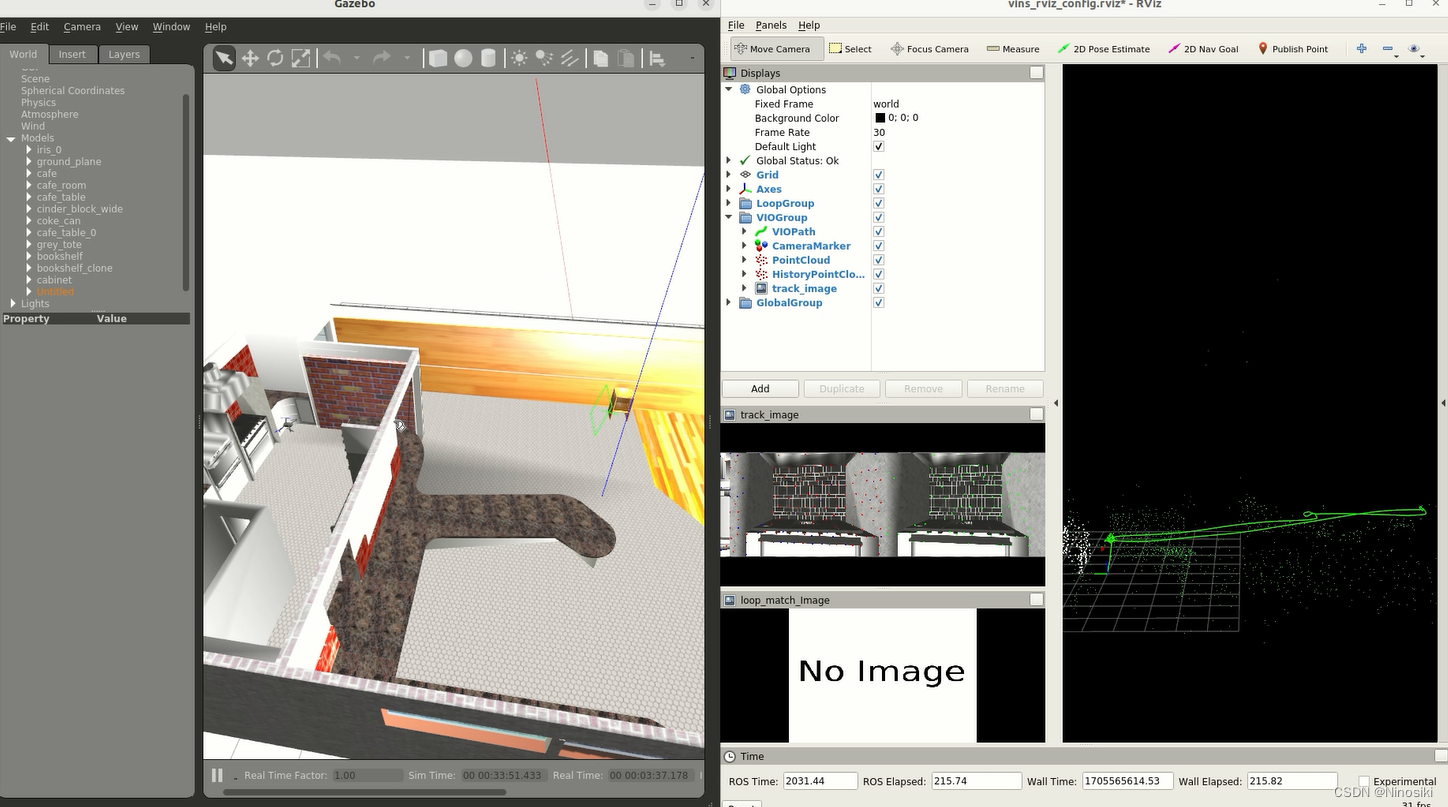
XTDrone里面就有现成的基于vins-Fusion的无人机定点的仿真,也确实和我想的一样只需要把vins-Fusion发布的odemetry类型话题转为对应给mavros的话题发给飞控就可以了。
XTDrone里面就有现成的基于vins-Fusion的无人机定点的仿真,也确实和我想的一样只需要把vins-Fusion发布的odemetry类型话题转为对应给mavros的话题发给飞控就可以了。 这上面我觉得XTDrone是做得比普罗米修斯好的 https://www.yuque.com/xtdrone/manual_cn/vio
Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 仿真平台配置
一、依赖安装 sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawk pip2 ins
飞行机器人(六)仿真平台- XTDrone Simulation Platform
ubuntu18.04安装Cereshttps://www.cnblogs.com/qilai/p/13654810.html Installation — Ceres Solverhttp://ceres-solver.org/installation.h