wheel专题

使用Python实现生命之轮Wheel of life效果
《使用Python实现生命之轮Wheeloflife效果》生命之轮Wheeloflife这一概念最初由SuccessMotivation®Institute,Inc.的创始人PaulJ.Meyer... 最近看一个生命之轮的视频,让我们珍惜时间,因为一生是有限的。使用python创建生命倒计时图表,珍惜时间

pip 间接通过多个 CPU 来加速安装 wheel
pip 间接通过多个 CPU 来加速安装 wheel pip install 和 wheel 本身并没有直接支持通过多个 CPU 来加速安装。然而,你可以使用以下方法间接加速安装过程: 并行编译: 对于需要编译的 Python 包(比如某些包含 C/C++ 代码的包),可以通过设置环境变量来并行编译,这样就可以利用多个 CPU 核心来加速编译过程。 export MAKEFLA

android-wheel三级联动
在github上面有一个叫做 android-wheel 的开源控件, 代码地址https://github.com/maarek/android-wheel 源码下载地址。。。。 主界面布局 activity_main.xml <LinearLayout xmlns:android="http://schemas.android.com/apk
【playwright篇】page.mouse.wheel/page.mouse.move
page.mouse.wheel(x, y, delta_x=0, delta_y=0) 参数说明 x: 鼠标指针的 X 坐标(相对于页面的左边缘)。y: 鼠标指针的 Y 坐标(相对于页面的顶部边缘)。delta_x (可选): 水平方向上的滚动距离(单位为像素)。正值表示向右滚动,负值表示向左滚动。默认为 0。delta_y (可选): 垂直方向上的滚动距离(单位为像素)。正值表示向下滚动,

轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,
Failed building wheel for sasl解决方案
今天安装superset依赖时报错: Failed building wheel for sasl 单独安装pip install sasl也报一样的错。 执行以下命令解决: sudo apt-get install libsasl2-dev
Windows环境下Python 安装库 is not a supported wheel on this platform解决办法【转】
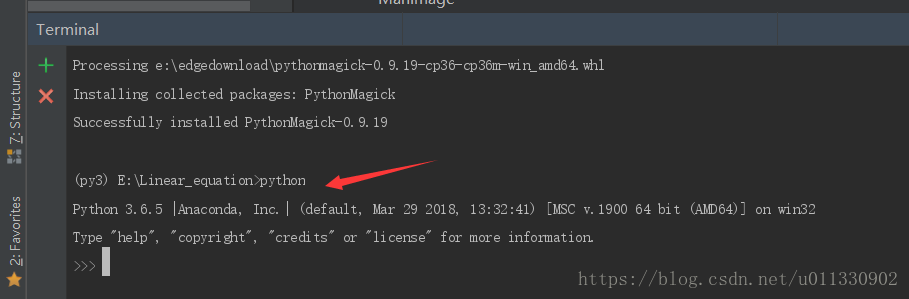
Windows环境下Python 安装库 is not a supported wheel on this platform解决办法 在使用python进行pdf转换图片时,需要PythonMagick库,但下载了许多whl都无法解决 解决方案 可能的原因1:安装的不是对应python版本的库,下载的库名中cp35代表python3.5,其它同理。【本人问题所在】 windows下如果用的是
时间轮片(Timing Wheel)实现心跳机制
在使用长连接的时候,我们通常需要使用心跳机制来防止意外断开的无效连接浪费系统资源。 心跳机制的实现常用的有两种: 第一:每一个客户端连接上时,就创建一个定时器,如果在指定时间内没有收到客户端发来的心跳,那么该定时器就将连接断开。如果收到,则重置定时器,重新计时。 但是在连接数量上万,甚至数十万百万时,定时器的数量也将有数十万甚至百万个,极大的耗费系统资源,甚至拖垮整个系统,因此这种方式适用于

猫头虎分享已解决Error || ERROR: Failed building wheel for XXX
博主猫头虎的技术世界 🌟 欢迎来到猫头虎的博客 — 探索技术的无限可能! 专栏链接: 🔗 精选专栏: 《面试题大全》 — 面试准备的宝典!《IDEA开发秘籍》 — 提升你的IDEA技能!《100天精通鸿蒙》 — 从Web/安卓到鸿蒙大师!《100天精通Golang(基础入门篇)》 — 踏入Go语言世界的第一步!《100天精通Go语言(精品VIP版)》 — 踏入Go语言世界的第二步!

将python库下载到本地安装—Pypi官网wheel版本选择详解—小白详解版
python库—本地安装文件下载🚀 在项目中需要在内网环境下配置python的环境,因此需要将用于安装python库的文件下载到本地传到内网环境当中然后再安装,通过这契机我开始了解了一下如何离线下载安装python的第三方库,以及配置本地的Nexus镜像源等事项,仔细研究发现这里有很多细节直接推敲的,上网搜了搜相关的教程,看了之后emmm,故有了这篇文章。 文章

Linux禁止非WHEEL用户使用SU命令
通常情况下,一般用户通过执行“su -”命令、输入正确的root密码,可以登录为root用户来对系统进行管理员级别的配置。 但是,为了更进一步加强系统的安全性,有必要建立一个管理员的 组,只允许这个组的用户来执行“su -”命令登录为root用户,而让其他组的用户即使执行“su -”、输入了正确的root密码,也无法登录为root用户。在UNIX和Linux下,这个组的名称通常为“

ORB-SLAM3如何加入GPS和Wheel轮速约束
0. 简介 对于ORB-SLAM3而言。如何将代码融入Wheel和GPS是一个挺有意思的事情。通过GPS和Wheel可以非常有效的约束视觉里程计结果。Wheel这块主要就是将速度等信息融合到前端中,类似IMU和视觉帧间的关系。而GPS由于频率不是很高,所以基本是用于全局修正的作用。这部分我们经常使用松耦合的形式,当然也有工作去做了紧耦合相关的工作。 1. Wheel特征添加 这一部分主要的其
鼠标滚轮滚动事件wheel
鼠标得滚动事件wheel 鼠标的滚轮事件主要有两种: onmousewheel(firefox不支持)DOMMouseScroll(只有firefox支持) wheel 的事件对象得属性: deltaY、detail、wheelDelta ,deltaMode detail deltaX,鼠标滚轮左右摆动,本属性是只读的。 负值,向左;正值,向右。(正负方向,跟系统的x坐标保持一致。)

.whl文件安装时报错-*.whl is not a valid wheel filename
用windows系统用pip install安装Numpy.whl 文件,总安装不上. 不要尝试下面的下载安装方式了. 解决方法在这里
OSError: Command ~/py3.7/bin/python - setuptools pkg_resources pip wheel failed with error code 2
命令:virtualenv --system-site-packages -p python py3.7 试了网上的更新pip的方法,发现还是照样报错,尝试了一下把文件名改一下,py3.7变成py7,就变好了,看来是符号问题。

关于Unity3d组件wheel collider的笔记
Unity3d组件wheel collider基础使用: 配置组件: 插入模型后在汽车内创建两个空物体分别负车轮模型和wheel collider; 注意车轮不要添加别的碰撞器只要wheel collider 另外wheel collider添加在空物体上如 添加完毕后将wheel collider 与车轮模型对齐如 全部处理完成后为车辆添加刚体并将质量调大否则会出现乱跳或者飞出取的情况
pygobject pip3升级问题:ERROR: Failed building wheel for pycairo
问题 这个问题是从很长一段问题中截出来的,全文如下,是使用pip3或者说pip-review升级遇到的问题 pygobject==3.34.0 is available (you have 3.26.1)Defaulting to user installation because normal site-packages is not writeableProcessing /home/

mamba-ssm安装building wheel卡着不动后error...避坑解决方法
文章目录 方法1、下载whl文件到本地后pip install安装成功后验证: 方法2、拉取Docker镜像 对于项目中用到MambaIR的小伙伴,需要pip安装 causal_conv1d和 mamba-ssm两个包及其依赖: torchpackagingtransformers MambaIR-Github主页(含installation) This code
Python3.8上安装vtk和mayavi踩坑: Building wheel for mayavi (setup.py) ...
用python3.7时,mayavi貌似很容易安装。 现在彩python3.8,发现安装时有下面的问题: 。。。。 UnicodeDecodeError: 'ascii' codec can't decode byte 0xe2 in position 45: ordinal not in range(128) CCompilerOpt._cache_write[796] : write
“base_l_wheel_joint“ was received but not found in URDF
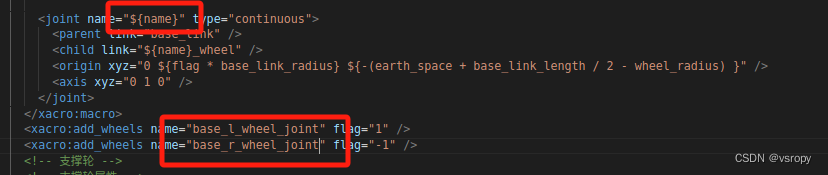
运行demo05_car_base.urdf.xacro文件时报错: [ WARN] [1620731067.801481542]: Joint state with name: "base_l_wheel_joint" was received but not found in URDF 原因: 可能要与下载xacro的文件名称一致 解决: 将left和right(一样会
windows10使用wheel安装tensorflow2.10.0(GPU版本)/2.13.0(最新版本) (保姆级教程)
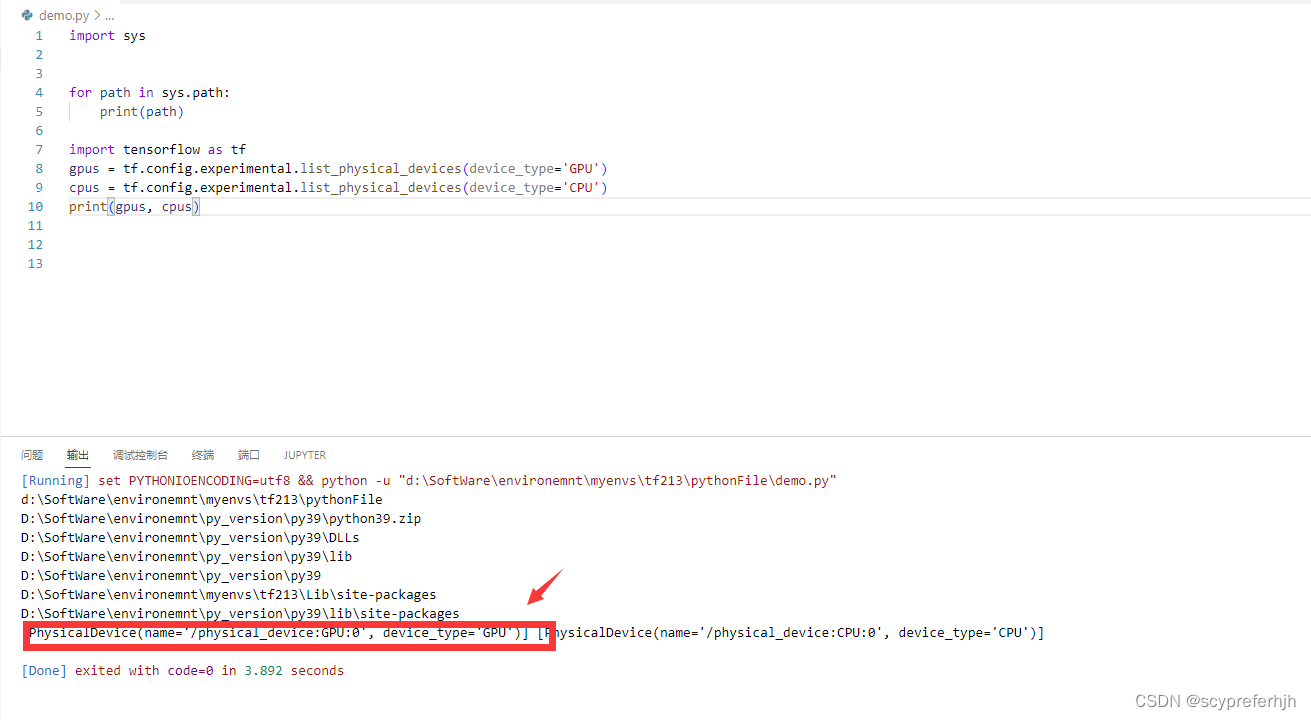
安装过程 安装虚拟环境安装virtualenv安装满足要求的python版本使用virtualenv创建指定python版本的虚拟环境 安装tensorflow安装tensorflow-docs直接下载使用wheel下载 在VSCode编辑器中使用虚拟环境下的python解释器,并使用tensorflow常见错误 注意: tensorflow 2.10.0是最后一个支持GPU的版本

python 解决包安装失败(Building wheel for wrapt (setup.py) ... error的解决办法)
问题: 1、第三方包安装失败 2、提示pip版本不匹配,实则是缺wheel 解决: 1、下载对应的版本的wheel,参考文章解决https://blog.csdn.net/weixin_45556441/article/details/110483622 下载wheel网址https://www.lfd.uci.edu/~gohlke/pythonlibs/#gdal eg:from osg
解决安装3.8虚拟环境时OSError:...setuptools pip wheel failed with error code 1 and No module named '_ctypes'
文章目录 一:遇到的问题(直接查看 二 解决方案即可)1. 安装python3.8之后安装python3.8的虚拟环境出现2.在pycharm中选择环境时安装所需要的包出现 二:解决方案: 一:遇到的问题(直接查看 二 解决方案即可) 1. 安装python3.8之后安装python3.8的虚拟环境出现 OSError:...setuptools pip wheel fai
错误:ERROR: Failed building wheel for pyaudio
问题描述 安装pyaudio的时候报错 $ pip install pyaudio Looking in indexes: https://pypi.tuna.tsinghua.edu.cn/simpleCollecti

安装pyltp问题:pyltp-0.2.1-cp36-cp36m-win_amd64.whl is not a supported wheel on this platfrom
在Anaconda Prompt(anaconda)管理员身份运行下pip install pyltp-0.2.1-cp36-cp36m-win_amd64.whl安装的python版本必须是3.6,而本人的anaconda环境默认是3.8.8,这时可以激活自己anaconda下的python3.6环境安装就可以了图片中python36是本人python3.6环境的名字,F:\pyltp 是轮子的
pytorch中的wheel文件
文章目录 pytorch中的wheel文件什么是wheel文件wheel文件的位置安装完成后wheel文件可以删除吗? pytorch中的wheel文件 什么是wheel文件 .whl 文件是 Python 的一个软件包分发格式,用于在 Python 中安装软件包。它是 Python Wheel 的缩写,也被称为 wheel 文件。这种文件格式旨在简化 Python 软件包的