vrep专题
构建VREP和MATLAB联合仿真实验平台,控制机械臂末端按照固定轨迹移动
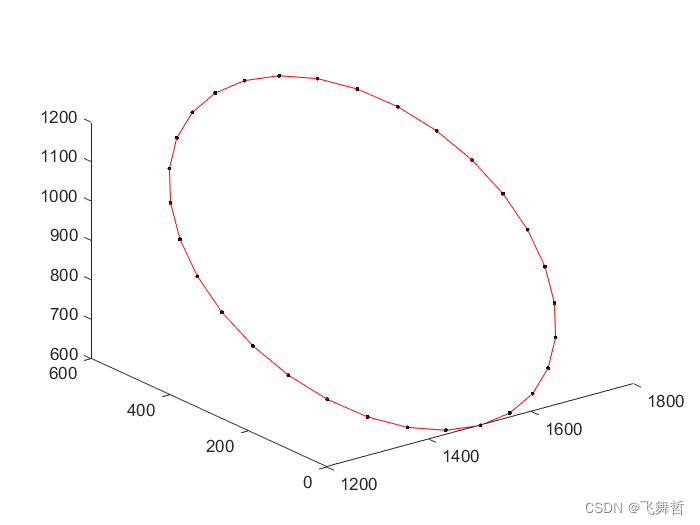
构建VREP和MATLAB联合仿真实验平台,控制机械臂末端按照固定轨迹移动。主要工作如下: (1)solidworks构建机械臂模型; (2)将solidworks中构建的模型导入VREP中建立机械臂的多体动力学模型; (3)建立VREP和MATLAB之间的通信; (4)构建DH坐标系,建立机械臂的正运动学模型; (5)求解机械臂的逆运动学模型; (6)规划末端执行器运动轨迹; (7)编写MATL

indigo 安装 V-REP和vrep_ros_bridge
首先,感谢Top Liu 和zhangrelay,本文是学习这两位老师文章之后,实践操作,写之,作为日后参考之用。在此,贴出两位老师的文章,供大家参考: ROS与Matlab系列2:连接vrep仿真器 机器人操作系统ROS(indigo)与三维仿真软件V-Rep(3.2.1)通信接口使用笔记 正文: vrep_ros_bridge提供了V-Rep和ROS之间的通信接口,可以实现使用
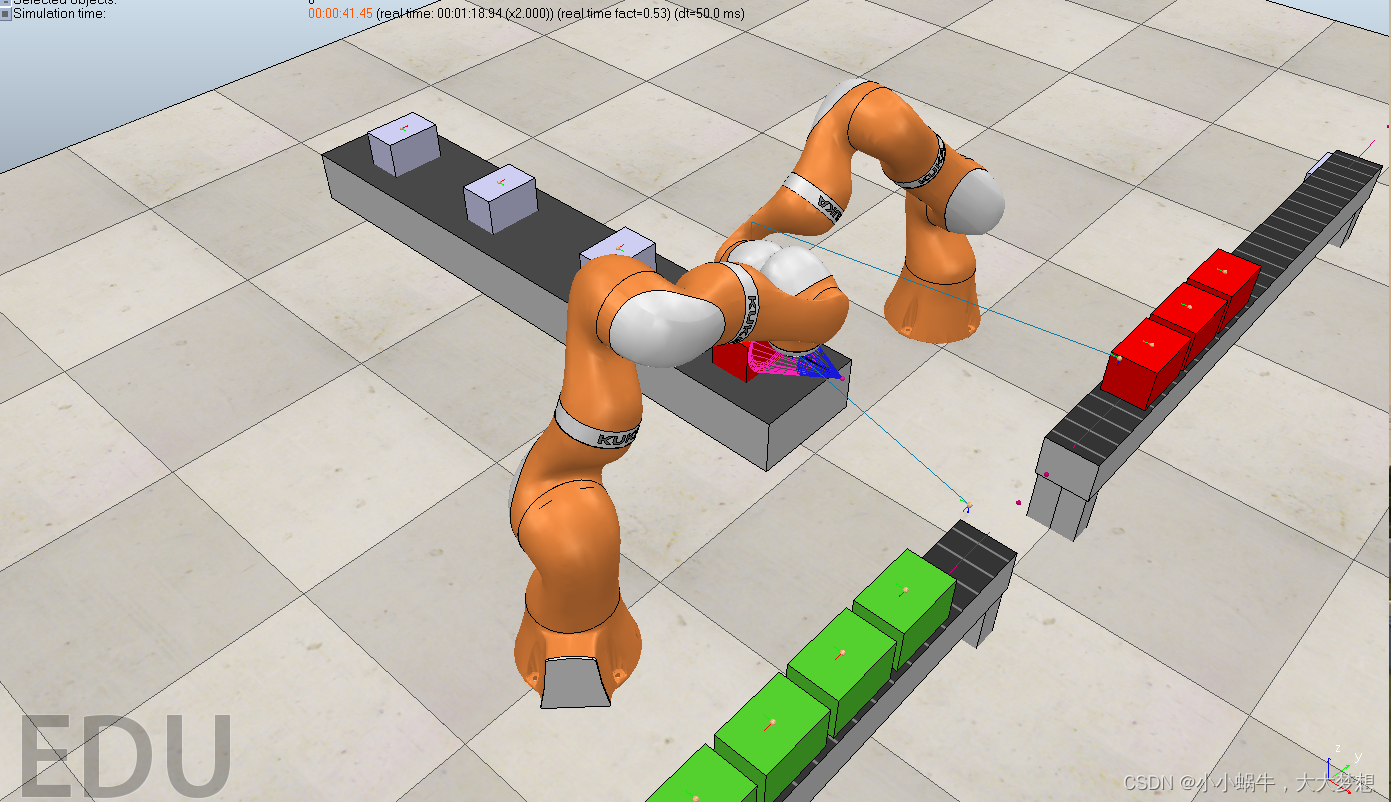
机械臂+传送带(vrep仿真)
https://github.com/xiaowan1117/vrep_belt_kukahttps://github.com/xiaowan1117/vrep_belt_kuka