voxel专题

Voxel Map for Visual SLAM(ICRA2020)
文中提到,使用slam中传统的关键帧技术有时候并不是最优的,比如纹理少、没有结构信息, 特别是有遮挡的情况等等。。。 A. Voxel hashing data structure 存储地图点使用的是hash表,首先将地图分割成voxel,然后每个voxel中都存放很多的3dpoint,同时3dpoint中携带feature信息(descritor or 2d detector)

Unifying Voxel-based Representation with Transformer for 3D Object Detection
Paper name Unifying Voxel-based Representation with Transformer for 3D Object Detection Paper Reading Note URL: https://arxiv.org/pdf/2206.00630.pdf TL;DR NIPS 2022 文章,提出了在 voxel 特征空间统一多模态输入的方式(U
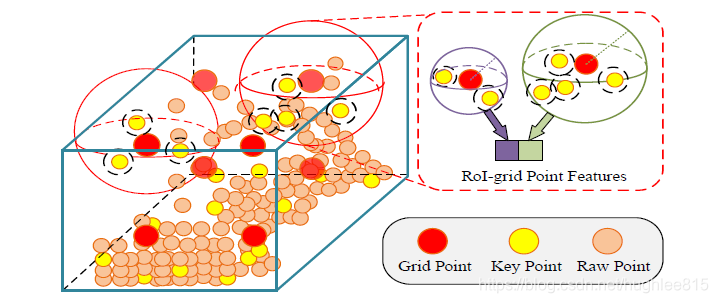
一文读懂PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
为了致敬*一文读懂Faster RCNN*,本文取名如此。希望能帮助大家以轻松的姿态理解这一霸榜kitti大半年的3D目标检测算法。 0. 立论依据 按照点云的前处理方法划分,通常3D目标检测可以分为基于体素和基于点的方法。文中提到二者有其各自的特点:基于体素的方法能有效地进行region proposal,但是感受野受到卷积核大小的限制。而基于点的方法恰好能够获得灵活的感受野,更捕获更精确的上下
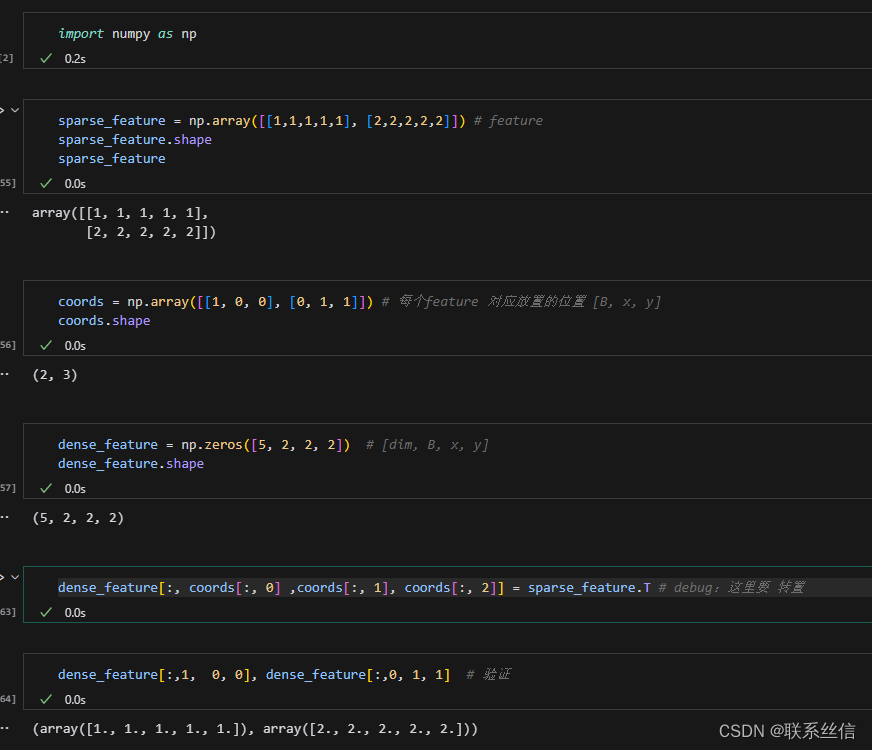
【代码学习】voxel 或者 pillar,稀疏张量 转 稠密张量 的代码理解,理解了很久
需要 feature 和 对应 的坐标 coords debug:转置,不然维度不匹配! 对应的代码,向量化 应该 比 for循环快 def voxel_indexing(self, sparse_features, coords): # sparse_features: [N, C], coords:[N, 4]dim = sparse_features.shape[-1]dens
解读:PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
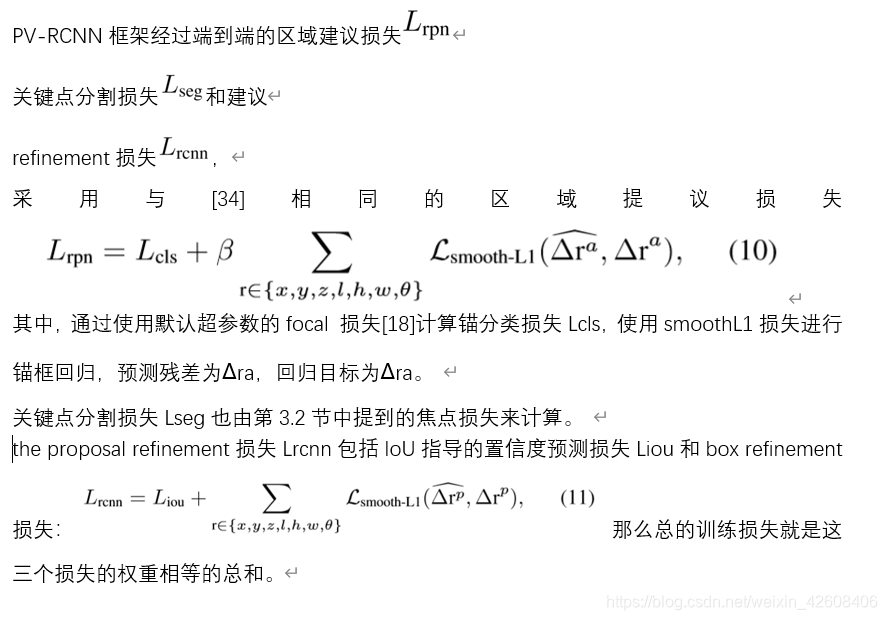
文章目录 1.摘要2.Introduction3.网络结构3.1用于有效特征编码和建议生成的3D Voxel CNN3.2.通过voxel set abstraction进行voxel到关键点场景编码3.3.扩展的VSA模块3.4.预测关键点权重3.5.key point-to-grid RoI特征抽象用于proposal refinement 4.损失 1.摘要 提出了一种
Voxel Map for Visual SLAM(ICRA2020)
文中提到,使用slam中传统的关键帧技术有时候并不是最优的,比如纹理少、没有结构信息, 特别是有遮挡的情况等等。。。 A. Voxel hashing data structure 存储地图点使用的是hash表,首先将地图分割成voxel,然后每个voxel中都存放很多的3dpoint,同时3dpoint中携带feature信息(descritor or 2d detector)
![[论文阅读]Voxel R-CNN——迈向高性能基于体素的3D目标检测](https://img-blog.csdnimg.cn/de54f52aca1c49af9d4c214f39cd5ee8.png)
[论文阅读]Voxel R-CNN——迈向高性能基于体素的3D目标检测
Voxel R-CNN Voxel R-CNN: Towards High Performance Voxel-based 3D Object Detection 迈向高性能基于体素的3D目标检测 论文网址:Voxel R-CNN 论文代码:Voxel R-CNN 简读论文 该论文提出了 Voxel R-CNN,这是一种基于体素的高性能 3D 对象检测框架。作者认为,原始点的精确定位对于准确