ur5e专题
ROS 手眼标定 realsense435i+ur5e
手眼标定的原理 基坐标系(base_tree)和相机(camera_tree)两个坐标系属于不同的tree,通过将标签贴到手上,相机识别出标签的position和orention,并通过easy_handeye标定包得到tool0(机械手),进一步得到相对于base的位置关系。即子坐标系(camera_rgb_optical_frame)到父坐标系(base_link)之间的关系。 对于手眼

【Ubuntu20.04+Noetic】UR5e+Gazebo+Moveit
环境准备 创建工作空间 mkdir -p ur5e_ws/srccd ur5e_ws/src UR机械臂软件包 UR官方没更新最新的noetic的分支,因此安装melodic,并需要改动相关文件。 安装UR的模型配置包,包里面有UR模型文件,moveit配置等: cd ~/ur5e_ws/srcgit clone -b melodic-devel https://githu
MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
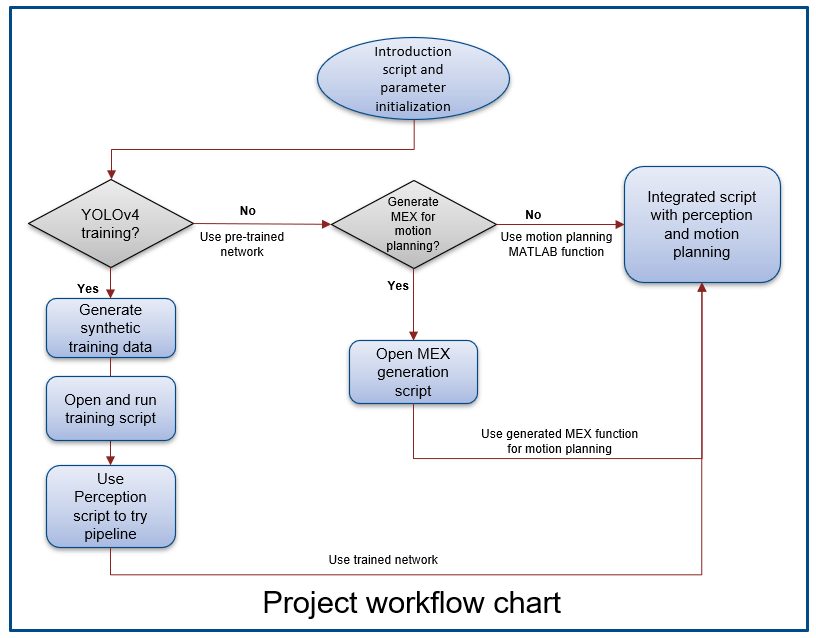
系列文章目录 前言 本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流程。 一、打开项目 要开始使用,请单击文档中的 "打开实时脚本 "或使用 openExample 函数
MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
系列文章目录 前言 本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流程。 一、打开项目 要开始使用,请单击文档中的 "打开实时脚本 "或使用 openExample 函数

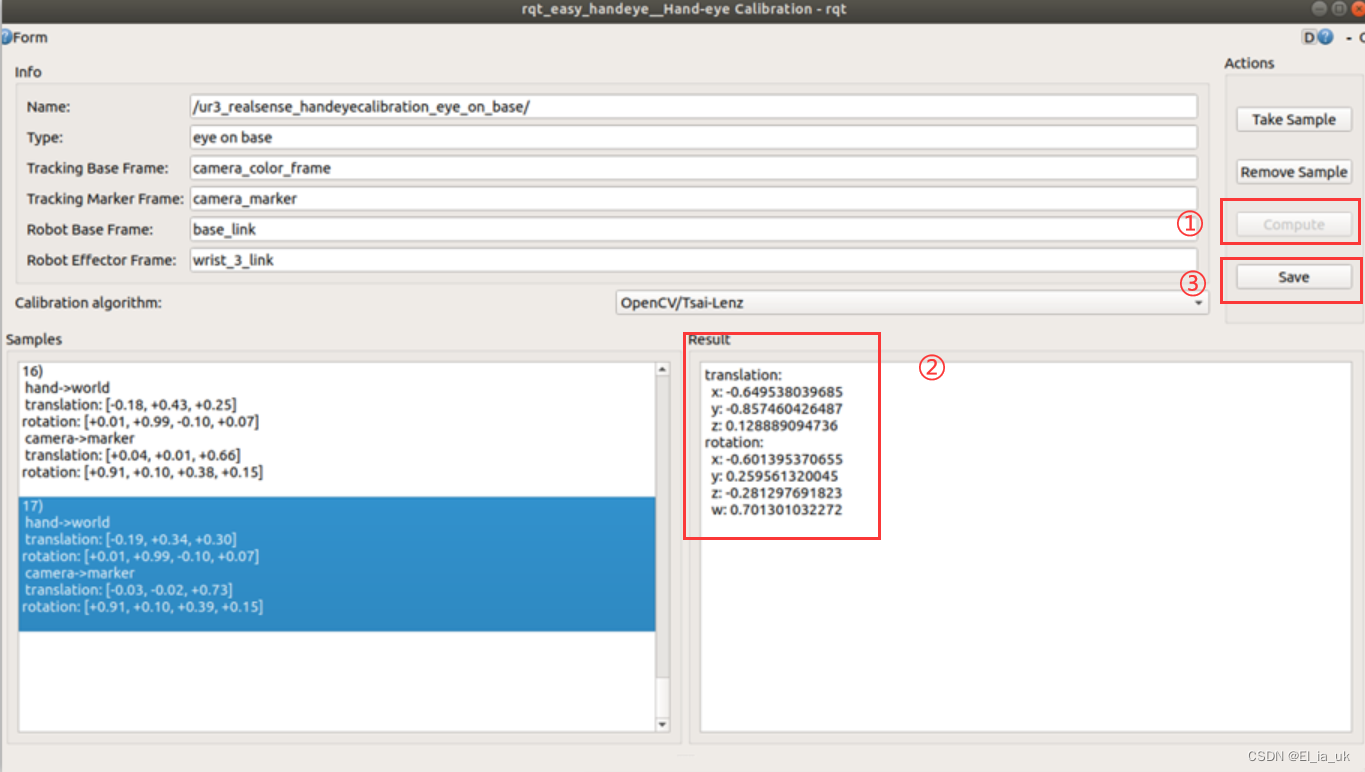
【手眼标定】ros/easy_handeye+ur5e+realsense D435i(eye on/to hand)
前言 此前有尝试过使用Matlab Tsai原理标定珞石工业机械臂,效果不是很好,也没有找到原因在哪里。终于来了北京实验室可以用UR5e在ROS框架下使用easy_handeye标定了,十分简洁哈哈哈哈哈 提示:以下是内容严重参考链接:https://zhuanlan.zhihu.com/p/92339362 十分感谢前人大佬的分享 0. 手眼标定原理 参考大佬深入浅出的解释 重点: