udacity专题
Udacity机器学习入门笔记——自选算法 随机森林
自选三个算法之一: 随机森林参数调整学习(Google自带翻译ε=(´ο`*)))) http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.RandomForestClassifier.html 在ud120-projects\choose_your_own\your_algorithm.py中添加以下代码 fr
Udacity机器学习入门笔记——决策树
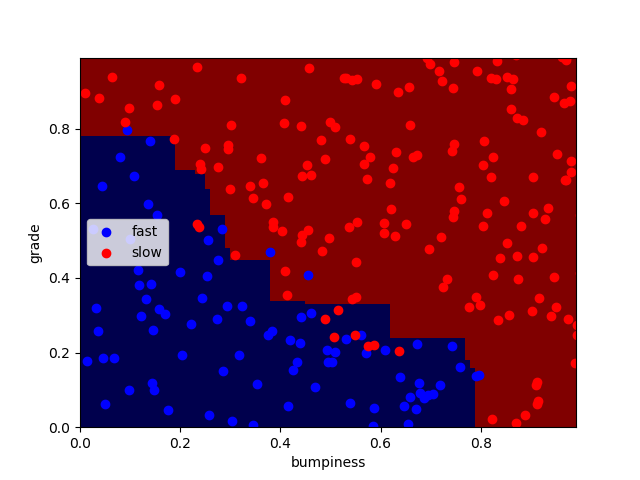
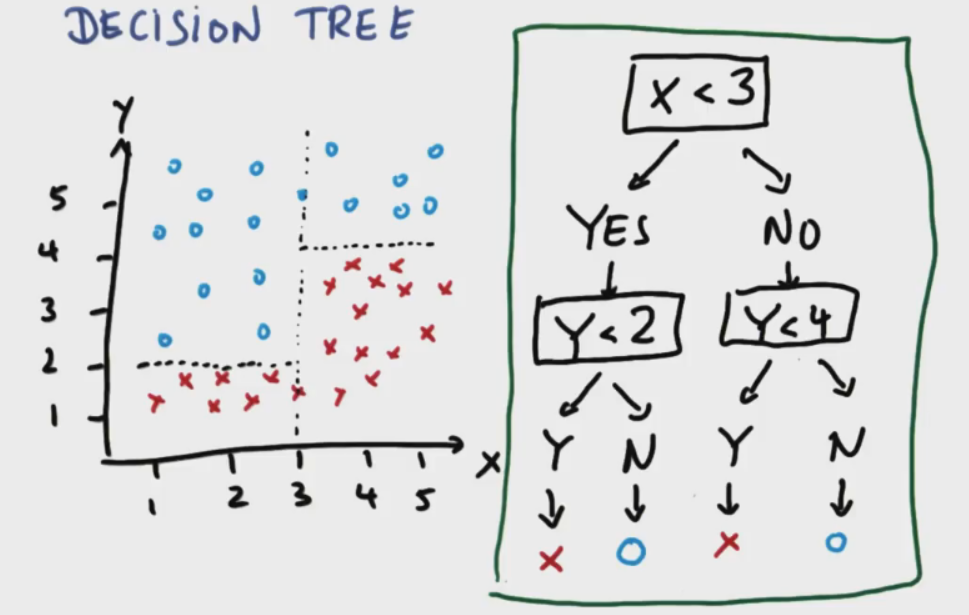
监督学习算法第三种——决策树decision trees 决策树可以通过核技巧把简单的线性决策面转换为非线性决策面 百度百科:决策树是一个预测模型;他代表的是对象属性与对象值之间的一种映射关系。树中每个节点表示某个对象,而每个分叉路径则代表的某个可能的属性值,而每个叶结点则对应从根节点到该叶节点所经历的路径所表示的对象的值 通过坐标数据进行多次分割,找出分界线,绘制决

一些我推荐的和想上的网络课程(Coursera, edX, Udacity)
从面向找工作的角度出发,我觉得以下课程有很大帮助: 首推Robert Sedgewick,也是我觉得对我帮助最大的老师,讲课特点是能把复杂的算法讲解清楚(典型例子:红黑树,KMP算法) 他在Coursera有四门课,循序渐进,也越来越理论,尤其是前三门,非常值得一上。个人认为上完前两门,你的理论基础(当然还要结合刷题的实践)已经可以虐普遍的小公司和大部分的大公司了。上完第三门可以虐一流公

udacity计算机科学导论python - 课程22-15 为什么python代码简单
这课里的fibonacci递归函数,也常称为花瓣序列, 1,1,2,3,5... 后一个数是前两个数之和。 在python中,建议用for函数代替递归函数,效率更高 def fibonacci(n): s1 = 0 s2 = 1 for a in range(0,n): s1, s2 = s2,s1+s2 return s1 可以看见,给
udacity计算机科学导论python - 课程22-4、5递归造词
问题: 如果造词的规则只有1个,word -> counter-word(反词),能造出几个新词 根据程序赋值法, word = counter-word, 第一次运行后,word的值变成counter - word, 第二次运行后, word的值又变回word, 然后, counter - word, word, counter - word ... 始终循环 因此词

逐渐了解python搜索原理 - 笔记:udacity计算机科学导论18/1-12
在python中,经过 建立索引index, 即关键词、网址按[[keyword1, [url11,url12...]],[keyword2, [url21,url22...]]...[keywordN, [urlN1,urlN2...]]] 搜索公式lookup(index, keyword)还需要把关键词keyword按首字母顺序分类排列, 以加快检索速度,像字典一样。p

udacity android 实践笔记: lesson 4 part b
udacity android 实践笔记: lesson 4 part b 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八(短信最佳) 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者

udacity android 实践笔记: lesson 4 part a
udacity android 实践笔记: lesson 4 part a 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八(短信最佳) 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者

udacity android 学习笔记: lesson 4 part b
udacity android 学习笔记: lesson 4 part b 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者及出处。

udacity android 学习笔记: lesson 4 part a
udacity android 学习笔记: lesson 4 part a 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者及出处。

udacity android学习笔记: lesson 3
udacity android学习笔记: lesson 3 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者及出处。 tips:htt

udacity 之 android学习笔记:lesson 2
udacity android lesson 2 学习笔记 作者:干货店打杂的 /titer1 /Archimedes 出处:https://code.csdn.net/titer1 联系:1307316一九六八 声明:本文采用以下协议进行授权: 自由转载-非商用-非衍生-保持署名|Creative Commons BY-NC-ND 3.0 ,转载请注明作者及出处。 tips:htt
挑战8门UDACITY课程学习方法总结
一开始由于我本身软件开发的基础,短期内很快就完成了前端开发纳米学位的学习。但这招“闪电战”在机器学习面前立马不管用了。“强化学习”和“深度学习”这些课题都很难,大大超出了我目前的能力范围,我卡了很久。最后决定看不懂的暂时跳过,先坚持自己的计划,把纳米学位修完,然后再慢慢消化和复习学过的内容。 https://zhuanlan.zhihu.com/p/45502088

环境配置:Udacity的Self-Driving项目安装运行
前言 Udacity的自动驾驶工程师纳米学位项目(Self-Driving Car Engineer Nanodegree Program)是一项面向学习者的前沿技术项目,旨在提供全面的自动驾驶工程师培训。该项目由Udacity与自动驾驶领域的领先公司和专业人士合作开发,涵盖了从传感器融合到深度学习等多个方面的内容。本篇内容将介绍此项目如何在自己的环境中进行配置。希望大家通过这个项目,能够在自动

【Computational Photography】Udacity LESSON 3 01-03 Dual Photography
春天的花是冬天的梦 Novel Illumination Novel Camera Dual Photography Reflective Properties of Ray of Light Stanford Dual Photography See: http://graphics.stanford.edu/papers/dual_photography/ We present

【Computational Photography】Udacity LESSON 2 01-02 What is Computational Photography?
春天的花是冬天的梦 What is Photography? http://en.wikipedia.org/wiki/Photography a process of taking light and store it. What is Computatitonal Photography? The Frankencamera: An Experimental Platform for
【Computational Photography】Udacity LESSON 1 01-01 Introduction
春天的花是冬天的梦 Computational Photography is an emerging new field created by the convergence of computer graphics, computer vision and photography. Its role is to overcome the limitations of the traditi

Udacity CEO,Google X实验室(Google眼镜)创始人Sebastian Thrun:移动教育
摘要:作为Google X实验室创始人,Sebastian Thrun通过视频向观众介绍了Google X的科研成果:无人驾驶汽车和Google眼镜。其中无人驾驶汽车是在普通汽车的基础上制造的,速度达到300迈/小时。Sebastian Thrun目前关注的是教育领域,他认为中国市场在移动以及教育方面有很多的商机和机会。 在全体大会上,Udacity CEO,Google X实验室(
【机器学习】 Udacity 笔记 01
因本人刚开始写博客,学识经验有限,如有不正之处望读者指正,不胜感激;也望借此平台留下学习笔记以温故而知新。这篇博客是复盘整理 Udacity 机器学习工程师课程的学习笔记。 在 scikit learn 中训练模型 在此部分,我们依然使用在前几个部分使用的数据集。 正在上传…重新上传取消 我们知道机器学习领域的一些最重要的分类算法,包括以下算法: 逻辑回归神经网络决策树支持向量机 练习
基于Udacity模拟器的端到端自动驾驶决策
1 端到端自动驾驶决策 端到端自动驾驶决策的输入为车辆的感知信息,如摄像头信息,输出为车辆的前轮转角和摄像头等信息。 如上图所示,为英伟达公司的端到端自动驾驶决策框架,其CNN网络如下图所示,其中包括一个归一化层、5个卷积层和3个完全的全连接层。 2 Udacity 模拟器介绍 Udacity self-driving-car-sim是Udacity开源的一个汽车模拟器,主要用于自动驾

Apollo Udacity自动驾驶课程笔记——高精度地图、厘米级定位
前言:目前 Apollo 内部高精地图主要应用在高精定位、环境感知、决策规划、仿真运行四大场景,帮助解决林荫道路GPS信号弱、红绿灯是定位与感知以及十字路口复杂等导航难题。 1 高精度地图 1、高精地图与传统地图 1.1 定义:高精地图是当前无人驾驶车技术不可或缺的一部分。它包含了大量的驾驶辅助信息,最重要是包含道路网的精确三维表征,例如交叉路口布局和路标位置。

sensor fusion of Udacity
文章目录 Radar Principles01 why use Radar02 the radar sensor Camera06 Combining Camera and Lidar Radar Principles 01 why use Radar 同时Radar能够在多雨多雪的环境下使用 02 the radar sensor Camera 06
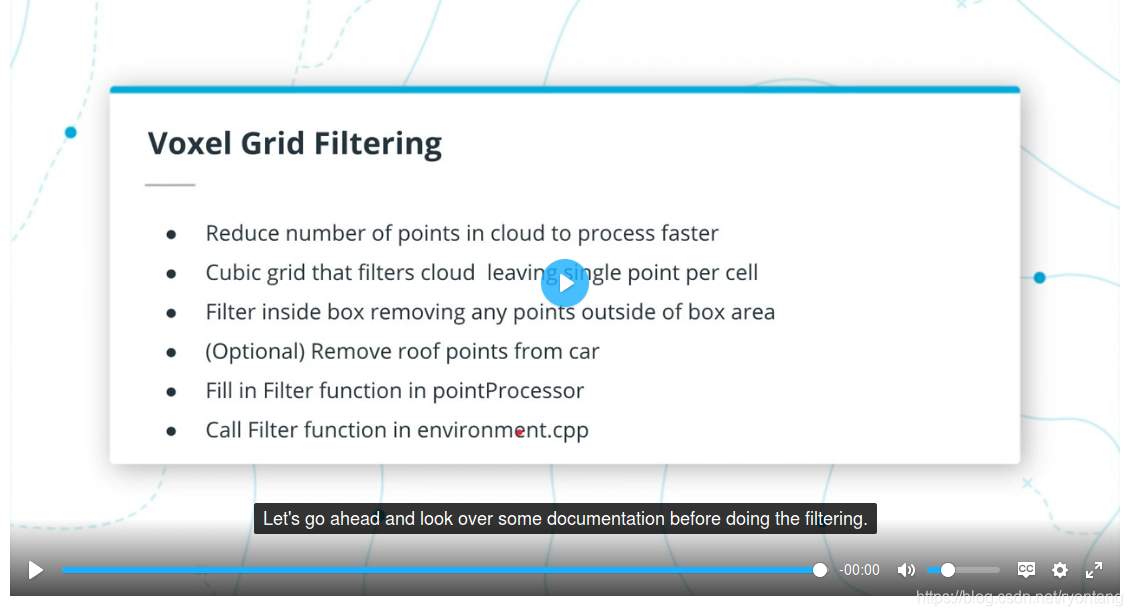
udacity sensor fusion(1)Lidar Obstacle Detection学习记录
INTRODUCE TO LIDAR AND POINTS CLOUDS 10 The course starter code 告诉了这一部分代码的主要作用 13 The PCL Viewer 解释了PCL库中的VIEWER,在environment.cpp中,将初始化的viewer传引用到两个函数中 15 ~ 16 使用lidar.h中的structure 初始化struct p

Udacity自动驾驶课程笔记(一)
前言 最近在Udacity 上报名参加了自动驾驶工程师的课程,抱着对无人驾驶的喜爱,我满怀热情的参加了此次课程,希望在本次课程之后,能够对无人驾驶技术能够有一个基本的了解。 Udacity 的无人驾驶课程应该是Udacity最有权威的课程了吧,因为Udacity的共同创始人兼CEO–Sebastian Thrun是谷歌X实验室创立者,自动驾驶汽车和谷歌眼镜的研发负责人,当年在斯坦福做教授的时候