turtlesim专题
ROS 2边学边练(2)-- 咱也玩玩Turtlesim
同ROS 1一样,Turtlesim(小海龟)例程往往是大家首次熟悉ROS世界的唯一不二之选(如同刚接触编程的同学,老师会让大家打出“Hello World”的道理一样),很多教学视频及书籍也同样如此,为何?麻雀虽小五脏俱全呗。其不光包含了ROS核心的节点、主题(topic)、服务(service)、动作(action)等等概念及功能,还涵盖了一些基本工具的使用体验,在普及知识点的
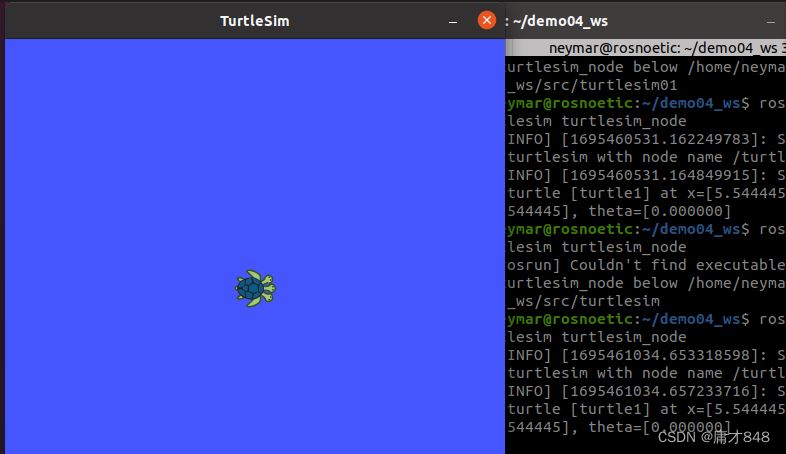
ROS解决小乌龟无法运行报错:Couldn‘t find executable named turtlesim_node below /home/xxx/xxx/src/turtlesim
根据报错,在home的xxx工作空间下的src文件中,找不到turtlesim的执行文件。 这个报错是因为在建立工作空间的过程中建立了一个与小乌龟turtlesim重名的文件,将该文件删除即可,也可将该工作空间一并删除即可 如果源文件中有比较重要的配置或者代码,建议将代码备份再删除工作空间。
![[ROS2 Foxy]#1.3 安装使用 turtlesim](https://img-blog.csdnimg.cn/direct/c9ba075619fe4bf1927da1ca594b6395.png)
[ROS2 Foxy]#1.3 安装使用 turtlesim
官网教程: https://docs.ros.org/en/foxy/Tutorials/Turtlesim/Introducing-Turtlesim.html 1.turtlesim安装和使用 turtlesim是一个轻量级的模拟程序,用来学习ROS2 .通过turtlesim来介绍ROS2在一个基础的水平上都要做了那些事,以此让我们了解将来在真的 robot或者模拟器上使用ROS2要

使用turtlesim小例子
问题1: 问题描述: 文字复制: …… Unable to contact my own server at [http://zhumeiqiang-B85M-D3V-A:34138/]. This usually means that the network is not configured properly. A common cause is that the ma

ubuntu ROS -- activate turtlesim window and control it with keyboard
1. run your roscore: $ roscore 2. run turtlesim in a new terminal: $ rosrun turtlesim turtlesim_node 3. run turtle keyboard teleoperation in a new terminal: $ rosrun turtlesim turtl
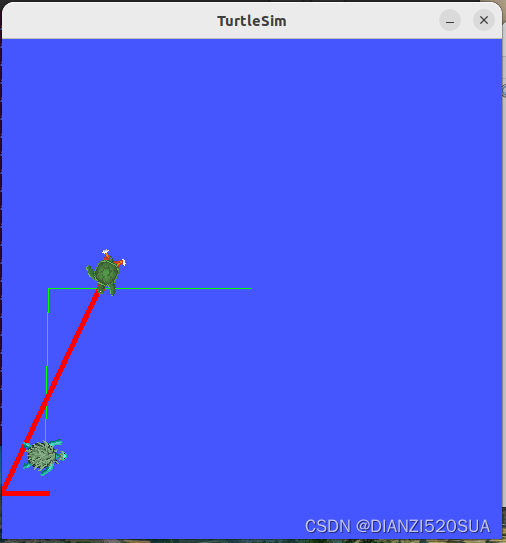
ubuntu下使用XBOX手柄控制ROS中的多个小乌龟turtlesim
文章目录 参考文档操作步骤利用microUSB线连接游戏手柄下载安装游戏手柄驱动库测试游戏手柄连接游戏手柄查看游戏手柄节点信息 编程控制一个小乌龟运动创建ros包创建joystick_example的ros包创建cpp文件:修改CMakeLists文件:新建example.launch文件: 运行测试文件:代码解释cpp代码解释launch代码解释 编程控制两个小乌龟同步运动代码修改cp