tnt专题

【TNT】Transformer in Transformer
这是今年中科院计算机科学实验室、华为和澳门大学联合写的一篇文章,题目非常硬核,TNT,像是多么爆炸性的产出。话不多说,直接开始学习吧。 论文:https://arxiv.org/pdf/2103.00112.pdf 代码:https://github.com/huawei-noah/CV-Backbones 目录 1.背景 2.网络 2.1网络结构 2.2网络计算 2

海上“沉睡的氢弹”,等于112.7万吨TNT,航母见了也得绕着走
天然气是我们日常生活中必不可少的清洁能源,它在防止雾霾、温室气体减排,大气污染治理等方面起到了关键的重要作用,由于天然气是气体,大规模的天然气生产、储存、运输占用了大量的空间体积, 这是国际国内天然气销售运输的一大瓶颈。 由此,LNG液化天然气技术油然而生,LNG是什么意思呢?它是英文液化天然气的缩写。LNG是在低温高压状态下由天然气压缩而成的,同等质量的LNG体积是标准状态下气态天然气的625

Transformer主干网络——TNT保姆级解析
前言 论文地址:arxiv 代码地址:github 接收单位:NeurIPS 2021 系列文章 Transformer主干网络——ViT保姆级解析 Transformer主干网络——DeiT保姆级解析 Transformer主干网络——T2T-ViT保姆级解析 Transformer主干网络——TNT保姆级解析 Transformer主干网络——PVT_V1保姆级解析 Transforme
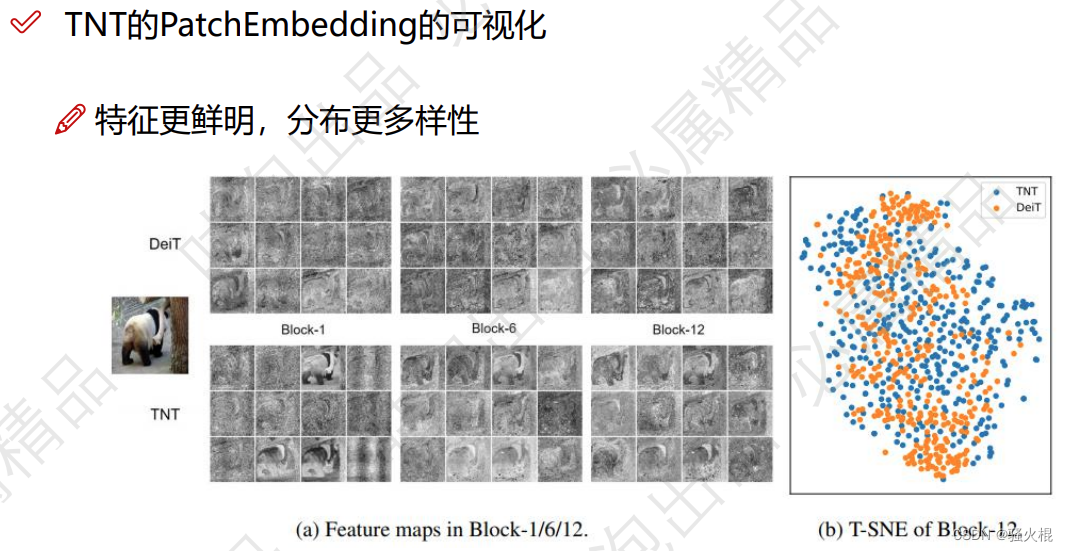
ViT(Vision Transformer) TNT(Transformer in Transformer)
ViT(Vision Transformer) ViT的结构 ViT将输入图片分为多个patch(16x16),再将每个patch投影为固定长度的向量送入Transformer,后续encoder的操作和原始Transformer中完全相同。但是因为对图片分类,因此在输入序列中加入一个特殊的token,该token对应的输出即为最后的类别预测。 (1) patch embedding 例
【单目标轨迹预测】TNT: Target-driveN Trajectory Prediction(翻译+笔记)
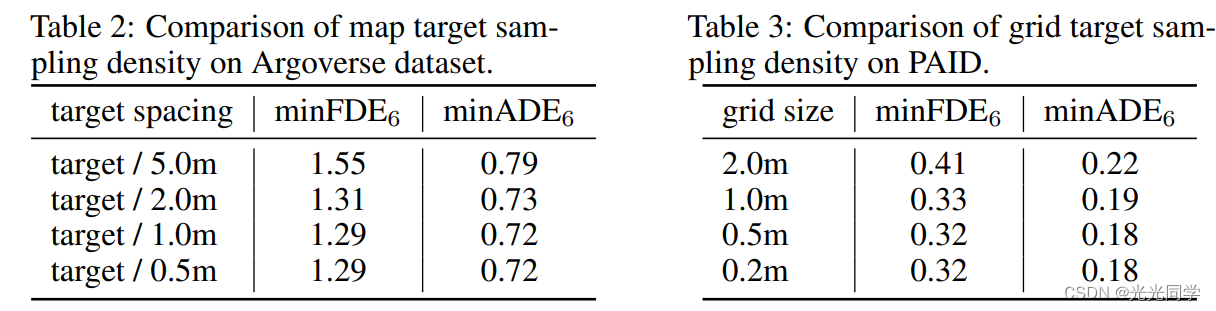
摘要 问题: 智能体未来的行为意图难以预测且是多模态性的。思路:在中等时间步长的预测中,目标未来的模式可以通过一组目标状态来有效的捕获方法:第一步,通过编码智能体与环境和其他智能体的交互,来预测智能体未来T步长可能的目标状态;第二步,生成以目标为条件的轨迹状态序;第三步,估计轨迹可能性和最后选择一个紧凑的轨迹预测集。区别:(1)之前的工作将智能体意图建模为潜在变量,并依赖于测试时间采样来生成不同

【论文翻译】TNT: Target-driveN Trajectory Prediction
文章目录 1. 前言2. 相关工作3. 公式4. 目标驱动轨迹预测4.1 场景背景编码4.2 目标预测4.3 目标条件运动估计4.4 轨迹评分和选择4.5 训练和推理细节 5. 实验5.1 数据集5.2 实现细节5.3 消融研究 TNT:目标驱动的轨迹预测 摘要: 预测移动代理的未来行为,对于现实世界的应用至关重要。这是具有挑战的,因为代理的意图和相应的行为是未知的并且