teb专题

move_base 调参记录(局部使用teb算法)
个人做实验时move_base的调参记录 文章目录 local_costmap_params.yaml1、width: height: base_global_planner_params.yaml1、use_grid_path:2、use_quadratic: teb_local_planner_params.yaml1、max_vel_x: 3.02、xy_goal_tolera

TEB teb_local_planner 构建超图过程error cost分析
G2O 背景 G20 边和顶点的定义 https://blog.csdn.net/weixin_43013761/category_11647404.html 使用G20优化器 优化 路径 https://blog.csdn.net/qq_29598161/article/details/115414732 https://zhuanlan.zhihu.com/p/121628349 buil


ROS局部路径规划器插件teb_local_planner规划流程概括总结
本部分文章主要用于对ROS局部路径规划器插件teb_local_planner的规划流程进行梳理,并概括总结,本部分计划包含5~6篇文章,各文章主要内容如下: ☆第一篇:主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相关流程,并对其进行梳理概括 文章链接如下: ROS导航包Navigation中的 Movebase
【Navigation】teb_local_planner 源码解析
ROS局部路径规划器插件teb_local_planner流程梳理(上) ROS局部路径规划器插件teb_local_planner流程梳理(下) 主要文件: test_optim_node.cppteb_planner_ros.cppoptimal_planner.cpp
teb planner error
roslaunch teb_local_planner_tutorials robot_diff_drive_in_stage.launch 的时候遇到下面问题: [FATAL] [1557372871.915458637, 2.200000000]: Failed to create the global_planner/GlobalPlanner planner, are you sure
【调试技术】用户态查看PEB和TEB
概述:用户态查看进程 PEB 和 TEB(通过windbg附加或启动调试的exe) 0x01 用户态查看 TEB 和 PEB 在双机调试的时候,可以直接使用 !PEB PID 和 !TEB TID 获取进程和线程的相关信息,在用户态这两个命令就会失效。原因就是用户态不支持大写的 !TEB 和 !PEB 命令。 在用户态调试时获取 teb 和 peb 的命令是小写的。 #获取 peb
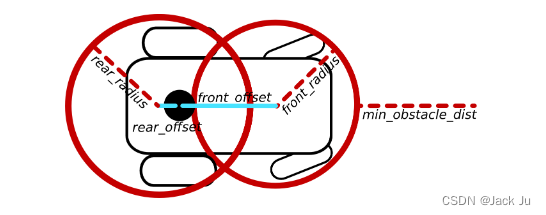
机器人控制算法——TEB算法障碍物检测分析
1.Background 在规划路线的时,需要机器人路线附近的障碍物距离,机器人控制系统需要知道当前机器人与障碍物最短的距离。本文主要是分析如何计算机器人与障碍物的距离,如果将机器人和障碍物分别考虑成质点,机器人与障碍物的距离就很容易求解了,但是事实上,障碍物与机器人在实际工程中不可能是质点。因此,本文需要解决的是: 机器人形状分别圆形、线性、多边形,障碍物也分别是圆形、线性、多边形时,二者的最
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束