stanley专题
Stanley-系列二
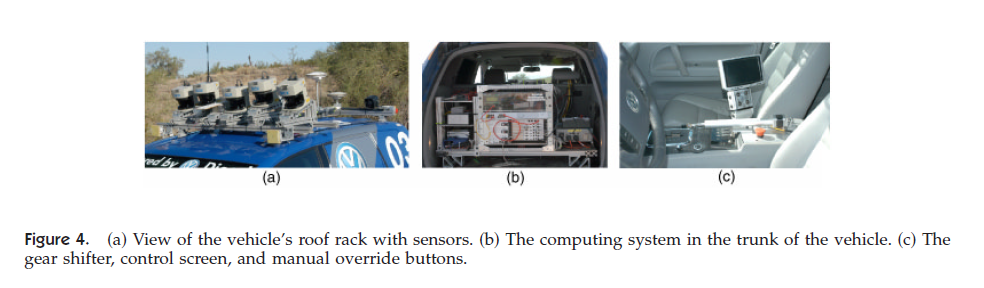
汽车 Stanley是基于一个柴油动力的大众途锐R5。途锐有四轮驱动(4WD),可变高度的空气悬挂和自动电子锁差速器。为了避免环境对汽车的影响,Stanley配备了防滑板和强化的前保险杠。一个自定义接口实现了直接电子驱动油门和刹车。连接到转向杆上的直流电机提供了电子转向控制。连接到齿轮切换器上的线性致动器控制汽车前进,倒退和停车(图4c)。汽车的数据(例如单个车轮的速度和转向角度)由感应器自动测

《C++ Primer 》第五版 Stanley B.Lippman
C++ Primer是非常非常有名的, 当时在读书的时候, 很多同学都买了这本书, 我也不例外, 那时应该是第四版, 毕业后就送人了。 2015年打算换工作, 所以就提前买了一本新的,慢慢啃,补补C++中的一些盲点。 在我换工作之前, 已经非常认真仔细地看了一大半。 换工作后, 看这类书的时间就少了些, 但也陆续地看看, 算是基本扫尾了。

《Evolving Neural Networks through Augmenting Topologies》by Kenneth O. Stanley and Risto Miikkulainen
Abstract 要解决的问题:网络的结构和参数一起进化 优势:①提出了一种在不同结构之间交叉的方法;②通过种族(speciation)来保障种群的创新性;③从一个最小的拓扑结构进行进化。 实验:①通过对比实验证明,在加强学习的任务上,增长性的结构比固定结构性能更好;②通过剪切实验证明NEAT算法的各个部分不可或缺。 贡献:①证明GA可以同时优化和复杂化(这里的复杂化应该指的是多样化)解

路径跟踪之Stanley控制算法
Stanley控制算法是一种基于横向误差(cross-track error)的跟踪算法,对该算法的相关解释可以参考下图。 上图中相关变量的含义如下: 1)为横向误差,是车辆前轮到给定轨迹最近点的距离; 2)为给定轨迹上点的切线方向与车身航向之间的夹角; 3)为前轮线速度方向与车身航向之间的夹角。 如果不考虑横向误差,要保持车辆沿给定轨迹运动,则前轮转角需要时刻保持与给定轨迹上点的切
【OpenAI】Python:基于 Gym-CarRacing 的自动驾驶项目(4) | 车辆控制功能的实现 | 开环控制 | 闭环控制 | 启停式控制 | PID 控制 | Stanley 控制器
猛戳!跟哥们一起玩蛇啊 👉 《一起玩蛇》🐍 💭 写在前面:本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2D 物理引擎的一个版本,经过修改以支持模拟汽车在赛道上行驶的物理过程。模块化组件 (Modular Pipeline) 分为 低层次感知与场景解析