splatam专题
论文复现《SplaTAM: Splat, Track Map 3D Gaussians for Dense RGB-D SLAM》
前言 SplaTAM算法是首个开源的基于RGB-D数据,生成高质量密集3D重建的SLAM技术。 通过结合3DGS技术和SLAM框架,在保持高效性的同时,提供精确的相机定位和场景重建。 代码仓库:spla-tam/SplaTAM: SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM (CVPR 2024) (githu

【三维重建】【SLAM】SplaTAM:基于3D高斯的密集RGB-D SLAM
题目:SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM 地址:spla-tam.github.io 机构:CMU(卡内基梅隆大学)、MIT(美国麻省理工) 总结:SplaTAM,一个新的SLAM系统,利用3D Gaussian Splatting作为底层map表示,渲染和优化更快,明确的地图空间范围,和流线型的地图
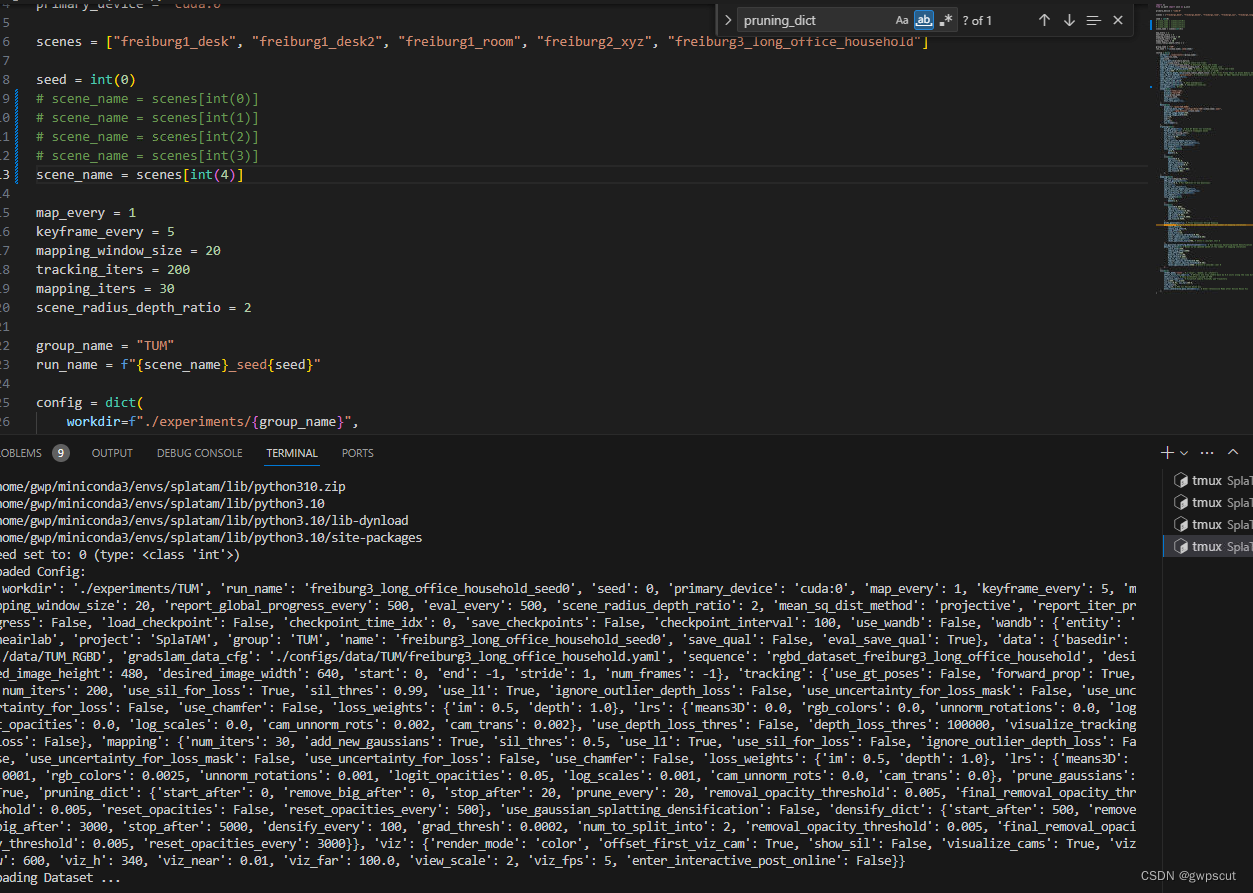
实验笔记之——基于TUM-RGBD数据集的SplaTAM测试
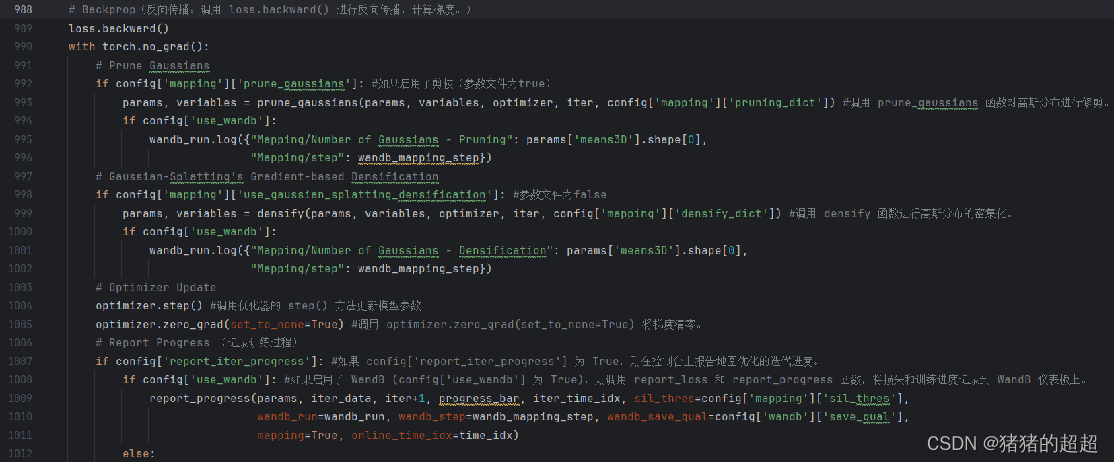
之前博客对SplaTAM进行了配置,并对其源码进行解读。 学习笔记之——3D Gaussian SLAM,SplaTAM配置(Linux)与源码解读-CSDN博客SplaTAM全称是《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》,是第一个(也是目前唯一一个)开源的用3D Gaussian Splatting(3DGS

【SplaTAM】基于RGB-D类型SplaTAM的定位与重建
SplaTAM ubuntu配置与运行记录 1. 资料收集2. 环境配置与运行注意问题3. 在线运行 近期各种定会涌现出一种新的基于高斯的方法,备受关注,这里我们也来学习下sota效果的slam用于定位和重建。 1. 资料收集 coda link3D Gaussians 2.1 Dynamic 3D Gaussians 2.2 3D Gaussian SplatingBa