socially专题
论文阅读笔记《Training Socially Engaging Robots Modeling Backchannel Behaviors with Batch Reinforcement Lea
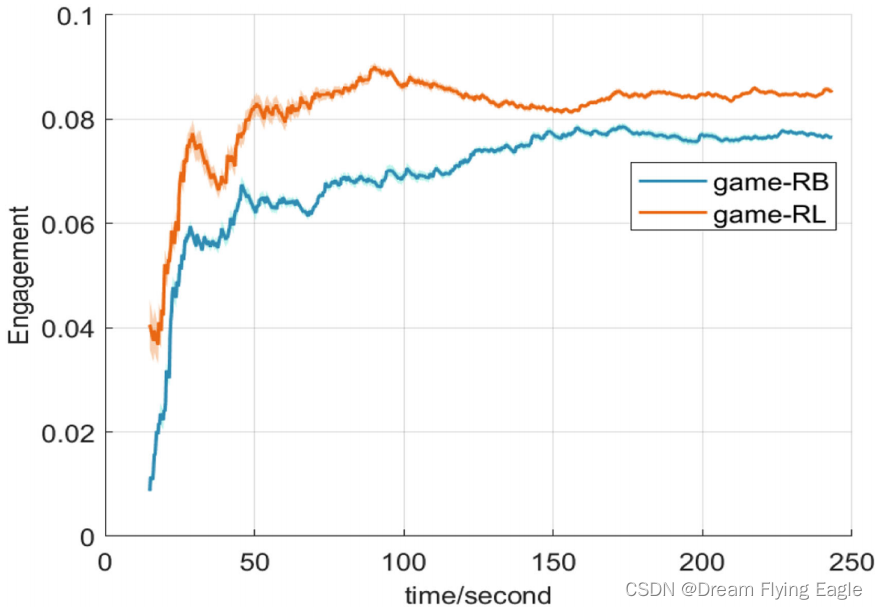
Training Socially Engaging Robots Modeling Backchannel Behaviors with Batch Reinforcement Learning 训练社交机器人:使用批量强化学习对反馈信号行为进行建模 发表于TAC 2022。 Hussain N, Erzin E, Sezgin T M, et al. Training Sociall
Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks
社会GAN:生成对抗网络的社会接受轨迹 1 引言 对于自动驾驶汽车或与人类共享同一个生态系统的社交机器人等自主移动平台来说,预测行人的运动行为至关重要。人类可以有效地进行复杂的社会互动,这些机器也应该能够做到这一点。为此,一项具体而重要的任务如下:给定观察到的行人运动轨迹(过去的坐标,如3.2秒),预测所有可能的未来轨迹(图1)。 由于拥挤场景中人类运动的固有特性,预测人类行为具有挑战性:
Codeforces B. Most socially-distanced subsequence (构造 / 模拟) (Round #649 Div.2)
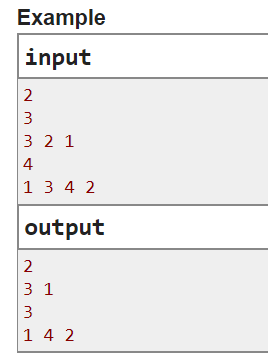
传送门 题意: 给出一个长度为n的序列a,找到其长度至少为2的子序列(不一定连续)。若子序列长度为k,要求子序列的特定值:|a[1] - a[2]| + |a[2] - a[3]| + …… + |a[k - 1] - a[k]|最大,且长度k最小。 思路: 由于需要求的特定值是子序列的连续差之和,所有我们可以O(n)遍历一遍,将不符合条件的元素踢掉即可。单独处理n == 2的情况。然后将a
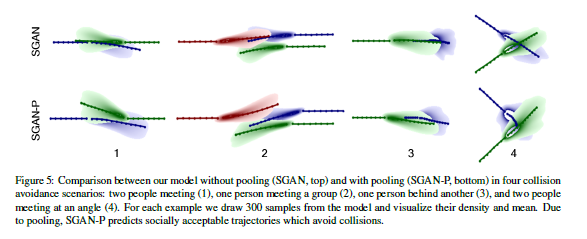
文献阅读报告 - Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks...
paper:Gupta A , Johnson J , Fei-Fei L , et al. Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks[J]. 2018.code:https://github.com/agrimgupta92/sgan 概览 文章提出了一种采用GAN