scharr专题

Sobel算子,Scharr算子和Laplacian算子
图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。有许多方法用于边缘检测, 绝大部分可以划分为两类:基于搜索和基于零穿越。 基于搜索:通过寻找图像一阶导数中的最大值来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并利用此方向找到局部梯度模的最大值,代表算法是Sobel算子和Scharr算子 基于零穿越:通过寻找图像二阶导数零穿越来寻找边

十六、计算机视觉-Scharr算子 和 Laplacian算子
文章目录 一、Scharr算子二、Laplacian算子 一、Scharr算子 Scharr算子和Sobel算子原理都一样,它是由Scharr在2002年提出的一种改进的Sobel算子。Scharr算子的优点在于它相对于Sobel算子有更好的旋转不变性和更小的边缘响应误差。 我们看下Scharr算子的水平卷积核: 可以看到其卷积核中的值比Sobel算子的对应值大,这使得Sc
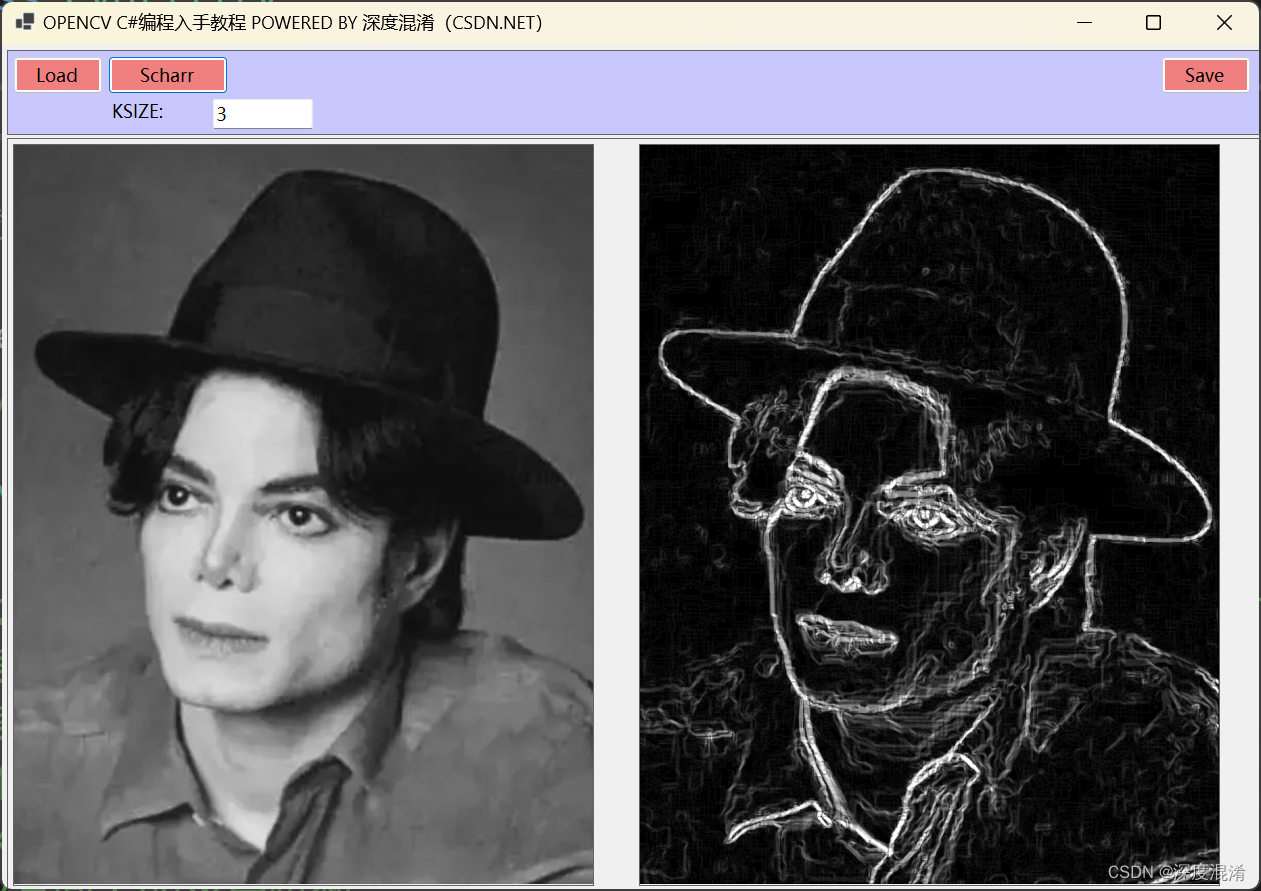
C#图像处理OpenCV开发指南(CVStar,09)——边缘识别之Scharr算法的实例代码
1 边缘识别之Scharr算法 算法文章很多,不再论述。 1.1 函数原型 void Cv2.Scharr(src,dst,ddepth,dx,dy,scale,delta,borderType) 1.2 参数说明 src 代表原始图像。dst 代表目标图像。ddepth 代表输出图像的深度。CV_16Sdx 代表x方向上的求导阶数。dy 代表y方向上的求导阶数。scale 代

《opencv实用探索·十二》opencv之laplacian(拉普拉斯)边缘检测,Scharr边缘检测,Log边缘检测
1、Laplacian算子 Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。同时,在图像边缘处理中,二阶微分的边缘定位能力更强,锐化效果更好,因此在进行图像边缘处理时,直接采用二阶微分算子而不使用一阶微分。 通常情况下,其算子的系数之和需要为零。 Laplacian算子具有各方向同性的特点,能够对任意方向的边缘进行提取,具

七、图像边缘检测之 Sobel、Scharr、拉普拉斯算子、Canny
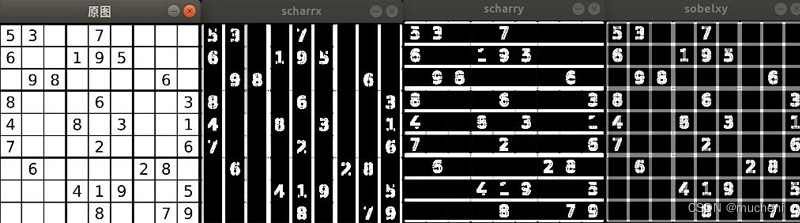
目录 一、Sobel 1、理论基础 2、Sobel算子函数及使用 (1)Sobel算子 (2)代码实例 二、Scharr 三、Sobel和Scharr比较 四、Laphlacian 五、Canny边缘检测 1、原理 2、代码实例 一、Sobel 1、理论基础 p5点处的水平方向梯度计算 p5点处竖直方向的梯度 图像的每一个像素的横向及纵向灰度值通过以下公
迅为RK3568开发板Scharr滤波器算子边缘检测
本小节代码在配套资料“iTOP-3568 开发板\03_【iTOP-RK3568 开发板】指南教程\04_OpenCV 开发配套资料\33”目录下,如下图所示: 在 Sobel 算子算法函数中,如果设置 ksize=-1 就会使用 3x3 的 Scharr 滤波器。Scharr 算子是 Soble 算子在 ksize=3 时的优化,与 Soble 的速度相同,且精度更高。Scharr 算子与
迅为RK3568开发板Scharr滤波器算子边缘检测
本小节代码在配套资料“iTOP-3568 开发板\03_【iTOP-RK3568 开发板】指南教程\04_OpenCV 开发配套资料\33”目录下,如下图所示: 在 Sobel 算子算法函数中,如果设置 ksize=-1 就会使用 3x3 的 Scharr 滤波器。Scharr 算子是 Soble 算子在 ksize=3 时的优化,与 Soble 的速度相同,且精度更高。Scharr 算子与