rviz2专题
ros2的nav2_map_server导入地图时,rviz2显示no map received
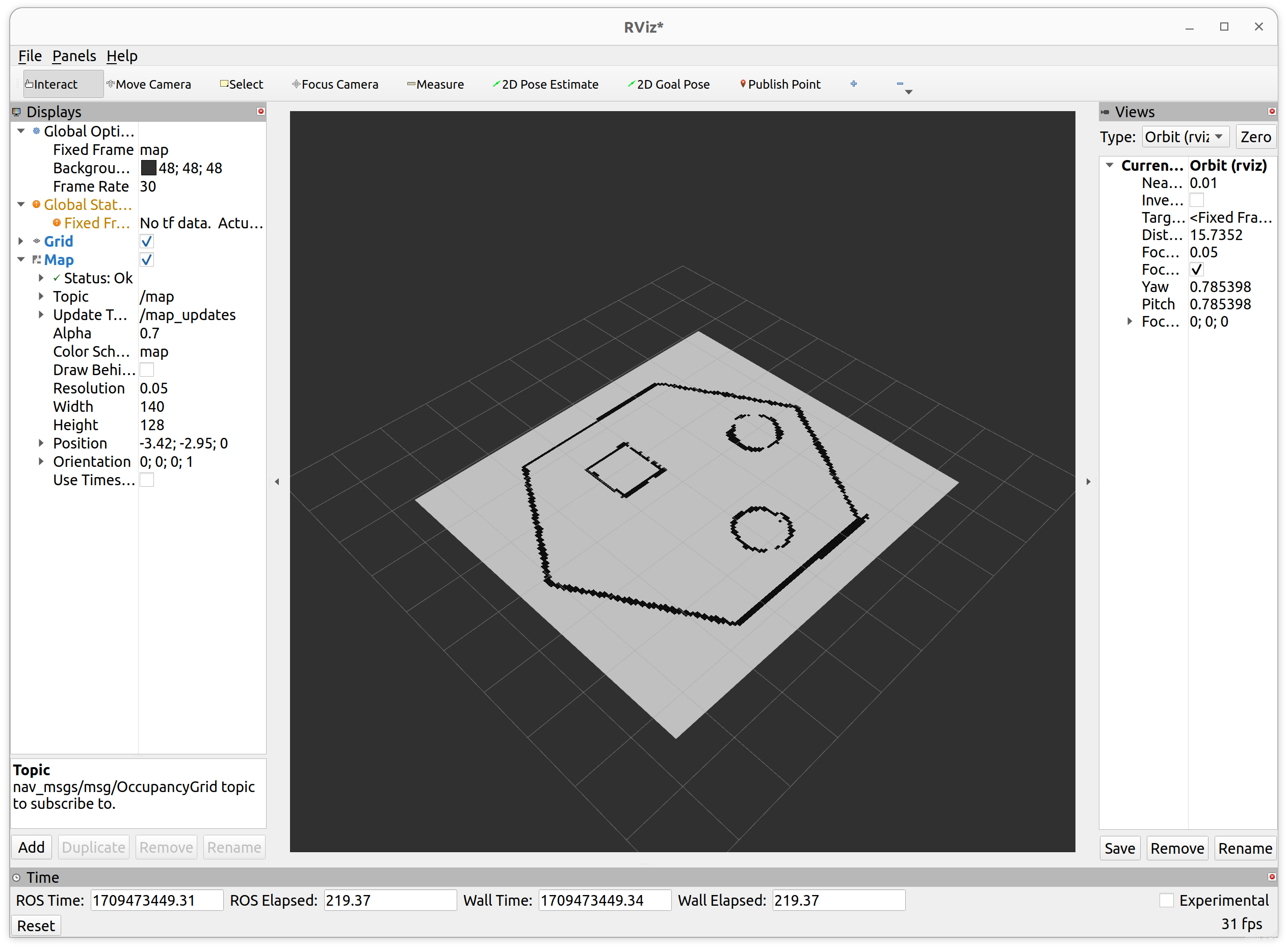
ros2的nav2_map_server导入地图时,rviz2显示no map received 步骤: 1、打开终端,进入src/map/运行下面指令: ros2 run nav2_map_server map_server --ros-args --param yaml_filename:=fishbot_map.yaml 2、打开rviz2 rviz2 通过add->bytop
【ROS】RViz2源码分析(三):核心类VisualizerApp
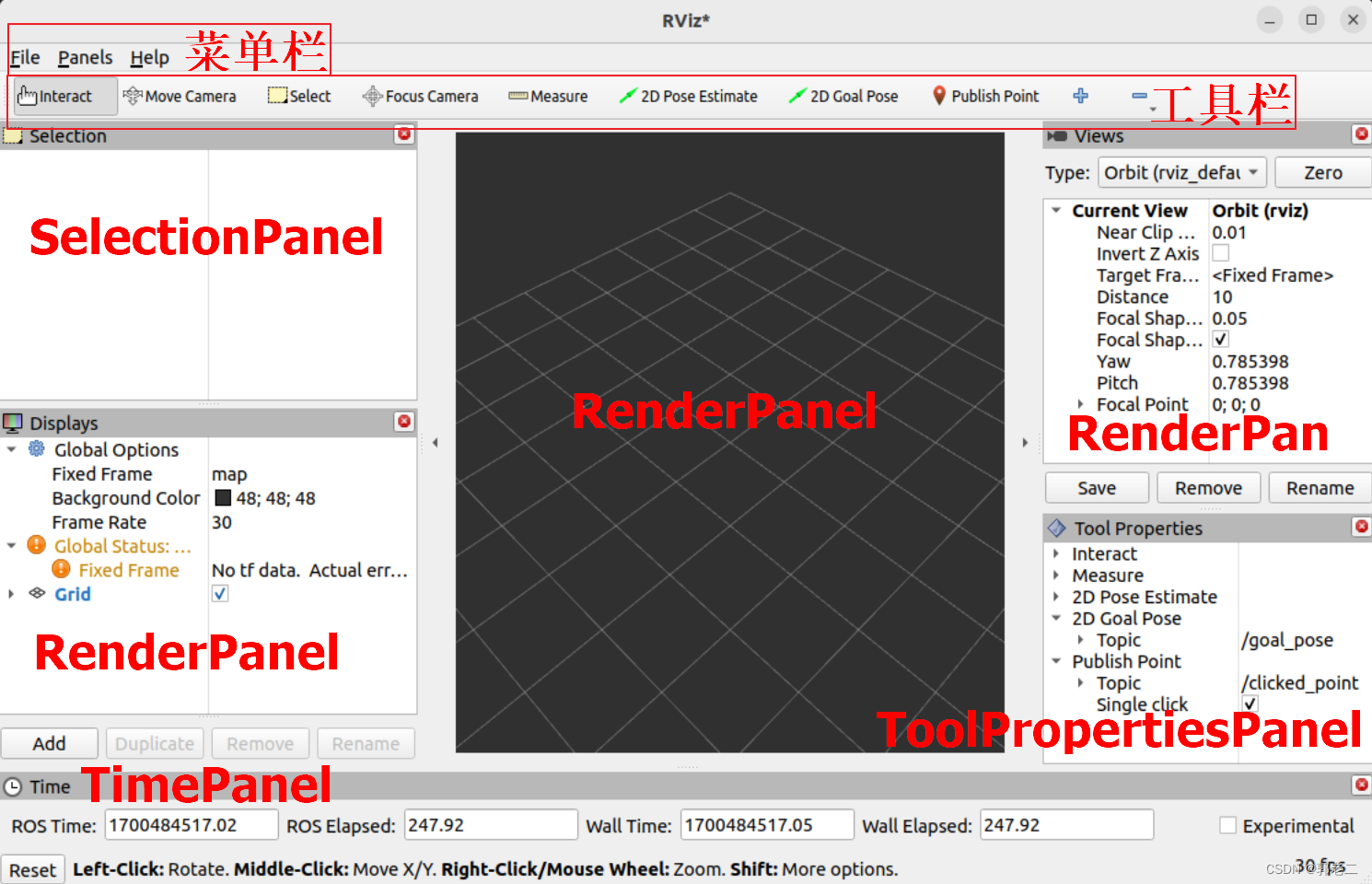
【ROS】郭老二博文之:ROS目录 1、简述 VisualizerApp包含了三个主要的功能: QApplication:程序中主要调用app_->processEvents()来处理刷新界面,处理闪屏VisualizationFrame:窗口类都在此;RosClientAbstractionIface包含rclcpp::Node:代表ROS节点 2、VisualizationFrame

【ROS】RViz2源码下载、编译、运行
1、源码下载 1.1 源码地址 ROS1对应的RViz源码:https://github.com/ros-visualization/rviz ROS2对应的RViz2源码:https://github.com/ros2/rviz 注意:在搜索RViz2源码时,使用傻度搜索的结果是对应ROS1的RViz,使用谷歌的搜索结果是正确的,RViz和RViz2的源码链接上面已列出,注意下载地址。