realtime专题

Deep Sort目标跟踪论文梗概SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC
DeepSort是跟踪算法中非常好用的一个,速度快,准度高。 本文为CVPR2017的跟踪算法。 论文:https://arxiv.org/pdf/1703.07402.pdf 代码:https://github.com/nwojke/deep_sort 摘要 简单在线和实时跟踪Simple Online and Realtime Tracking (SORT)是一种注重简单、高效的多目标跟踪

Realtime_Multi-Person_Pose_Estimation训练问题
https://blog.csdn.net/kkae8643150/article/details/102711101 前言 最近在研究Realtime_Multi-Person_Pose_Estimation的训练和再训练的过程。 参考 https://blog.csdn.net/qq_38469553/article/details/82119292 以及官方github https://
策略为王股票软件源代码\StkUI\View\RealTime.cpp------分时行情界面------程序代码基本都在里面
搜索 '成交'... C:\Users\Administrator\Desktop\源代码\策略为王股票软件源代码\StkUI\StkUI.rc(395): MENUITEM "以成交均价为准(&A)", ID_VIEW_MAINDATAAVERAGE C:\Users\Administrator\Desktop\源代码\策略为王股票软件源代码\StkUI\

Openpose翻译 Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields
openpose 论文 实现代码 中文翻译 Abstract 我们提出了一种有效检测多人图像中的2D姿势的方法。 该方法使用非参数表示,我们称之为部分亲和力 字段(PAF),用于学习将图像中的身体部位与个体联系起来。 该体系结构编码全局上下文,允许贪婪的自下而上解析步骤,无论图像中的人数多少,同时实现高精度和实时性能。 架构旨在将学习关节点和关节点之间的连接融合起来,通过相同顺序的两个

《Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields》论文笔记
《Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields》论文笔记 原论文: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 源码:ZheC/Realtime_Multi-Person_Pose_Estimation


【论文阅读】Realtime multi-person 2d pose estimation using part affinity fields
OpenPose:使用部分亲和场的实时多人2D姿势估计。 code:GitHub - ZheC/Realtime_Multi-Person_Pose_Estimation: Code repo for realtime multi-person pose estimation in CVPR'17 (Oral) paper:[1611.08050] Realtime Multi-Person
Verilog基础:$time、$stime和$realtime系统函数的使用
相关阅读 Verilog基础https://blog.csdn.net/weixin_45791458/category_12263729.html $time、 $stime和$realtime这三个系统函数提供了返回当前仿真时间方法。注意,这里的仿真时间的最小分辨能力是由仿真时间精度决定的,简单来说,可以理解为仿真时间精度是仿真器维护的仿真时间的最小单位(没有小数部分)
论文翻译2(凝练):Deep SORT: Simple Online and Realtime Tracking with a Deep Association Metric
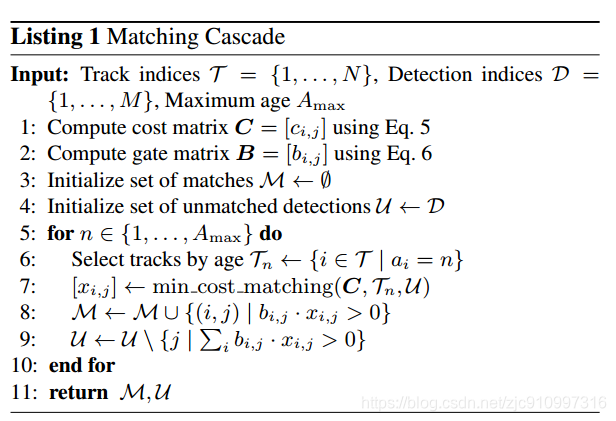
分配 匹配自然是指:当前有效的轨迹和当前的detections之间的匹配。 有效的轨迹:是指那些还存活着的轨迹,即状态为tentative和confirmed的轨迹。 轨迹和detection之间的匹配程度:结合了运动信息和表观信息。 运动匹配度 使用detection和track在kalman 滤波器预测的位置之间的马氏距离刻画运动匹配程度。 表示第j个detection和
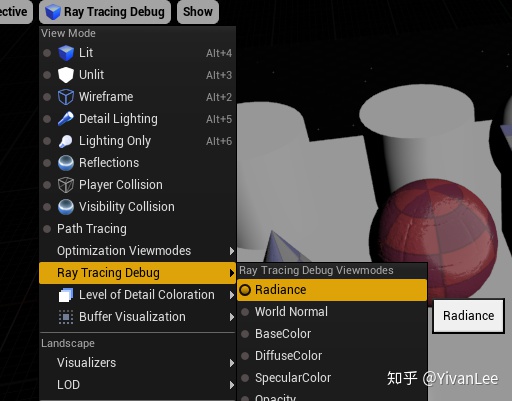
虚幻4渲染编程(光线追踪篇)【第四卷:Realtime Raytracing In UE4】
MY BLOG DIRECTORY: YivanLee:专题概述及目录 INTRODUCTION: 【1】 realtime raytracing overview 我们渲染一个东西需要一个渲染管线,渲染管线就是一系列操作把输入的数据渲染成最终的图片。最开始我们使用固定管线,然后再发展到可编程管线,其实还是相对固定的,我们只能控制整个渲染管线的一部分比如VS,PS,GS等,大部分流水

Towards-Realtime-MOT源代码学习之build_targets_thres()函数
该函数用于获取真实的置信度、目标框与id,其中目标框为投射到18*10大小特征图上的目标框 def build_targets_thres(target, anchor_wh, nA, nC, nGh, nGw):ID_THRESH = 0.5FG_THRESH = 0.5BG_THRESH = 0.4nB = len(target) # number of images in batchas

IBM Rational Test RealTime为开发人员测试提速
http://www.ibm.com/developerworks/cn/rational/r-realtest/ 软件项目越来越复杂,由于在开发人员对模块测试不充分,导致在集成测试和系统测试阶段耗费大量的时间和人力,甚至导致项目进度的重大延误。因此,为了保证项目质量和进度的可预见性,就要求开发团队对自己开发的代码进行充分测试。但在不借助工具的情况下,开发人员对代码进行完善的测试需要花费50%左
![【笔记】文献阅读[Deep-SORT]-SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC](https://img-blog.csdnimg.cn/c9c466e874204d10bedc2c2211774901.png)
【笔记】文献阅读[Deep-SORT]-SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC
Deep-SORT: SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC 引言1 介绍2 使用深度关联度量的SORT2.1 轨迹处理和状态估计2.2 指派问题2.3 匹配级联2.4 深层外观描述 3 实验4 结论5 个人理解与笔记 引言 文献阅读笔记,有翻译错误欢迎指出,一起讨论! 简单的在线

Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields解读
摘要 我们的方法,能够有效的检测一个图像中的多人。通过Part Affinity Fields来学习身体的各部分及关联性,利用全局纹理信息,自下而上的方法,达到实时性和高精度。通过两个分支来学习到部位的位置和关联性。 引言 一张图中的多人pose的难点: 1. 不知道一幅图有多少人,他们会存在不同的位置和不同的scale。 2. 人与人之间存在接触、遮挡、切断等复杂的空间干扰。 3.

# Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 我们提出了一种高效检测图像中多人二维姿势的方法。该方法使用一种非参数表示法,我们称之为Part Affinity Fields(PAFs),来学习将身体部位与图像中的个人联系起来。该架构对全局上下文进行编码,允许一个贪婪的自下而上的解析步骤,以保持高精度,同时实

【realtime】红帽 RedHat Linux实时内核配置要点全面分析
CentOS Linux实时性配置要点 rtoax 2021年2月 1. 概要 1.1. 实时性补丁 补丁地址:CentOS 7 - RealTime for x86_64: RealTime: kernel-rt-doc 3.10.0-693.2.2.rt56.623.el7.x86_64:下载 3.10.0-1127.rt56.1093.el7.x

zsh: ./realtime.sh: bad interpreter: /bin/bash^M: no such file or directory
zsh: ./realtime.sh: bad interpreter: /bin/bash^M: no such file or directory shell脚本运行出错: 是因为idea中的换行和linux的换行不一致而导致的 解决方案:①改变idea中的换行:改成linux下的 方案2:在脚本下面执行命令: set ff=unix ,然后直接回车即可