r3live专题

r3live 使用前提 雷达-相机外参标定 livox_camera_lidar_calibration
标定的是相机到雷达的,R3live下面配置的雷达到相机的,所以要把得到外参旋转矩阵求逆,再填入,平移矩阵则取负 港科大livox_camera_calib虽然操作方便,但是使用mid360雷达会有视角问题(投影三维点到相机),尝试了很多场景,标定效果都不理想(推荐场景是楼梯间),看来港大的更适合avia之类窄角度的雷达。livox_camera_lidar_calibration标定效果还不错,但

r3live使用记录-一些大家不说的细节
roslaunch r3live r3live_reconstruct_mesh.launch 三维重建会覆盖运行程序Control panel保存的地图,原始点云做好备份 在r3live_output目录下运行 meshlab textured_mesh.ply 可以查看重建后的地图 关于时间戳的问题(livox_ros_driver_for_R2LIVE) 使用livox官方的livox_
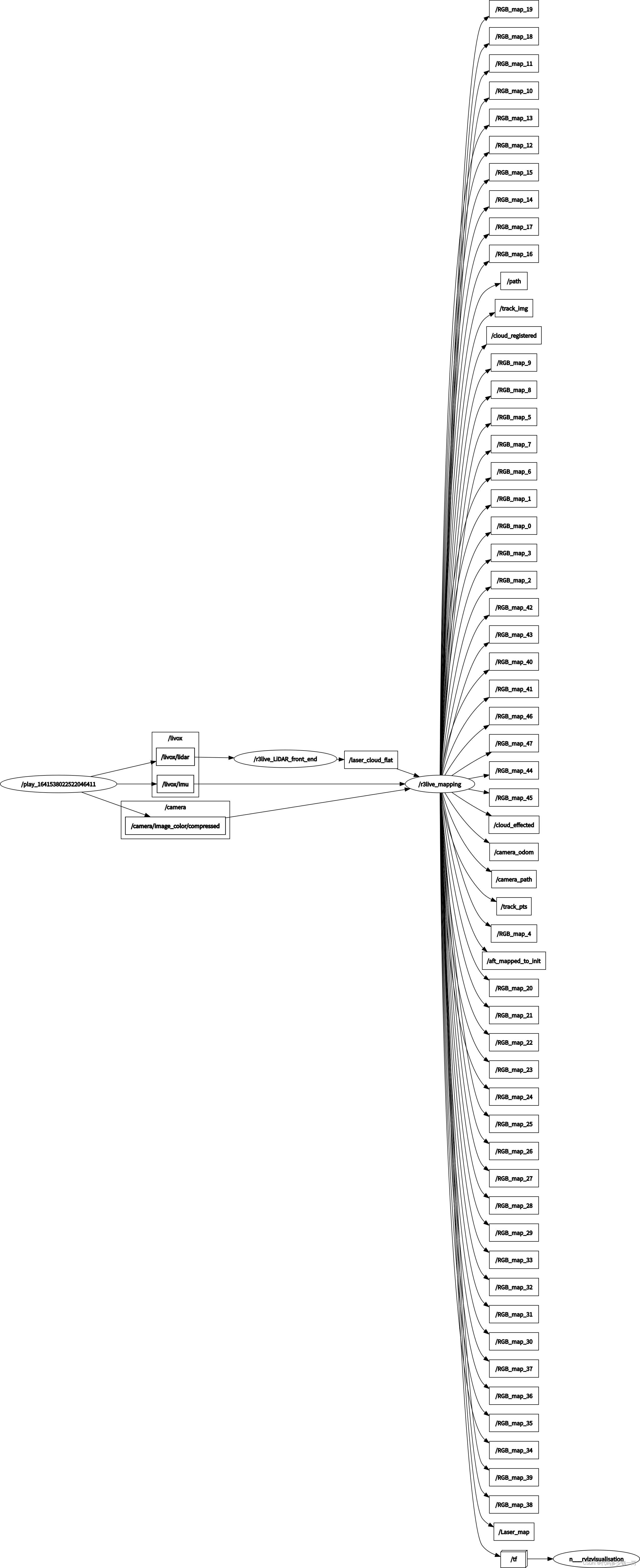
R3live:整体分析
R3LIVE相关参考: R3LIVE(升级R2LIVE):编译与运行 https://blog.csdn.net/handily_1/article/details/122271243?spm=1001.2014.3001.5502 R3live:整体分析 https://blog.csdn.net/handily_1/article/details/122360134?spm=1001.201

R3LIVE编译运行和代码分析
R3LIVE编译运行和代码分析 说在前面编译运行opencv4编译安装和使用cv_bridge和高版本opencv的适配 代码分析LiDAR_front_endLIOVIO数据结构Image_frameCamera_Lidar_queueMeasureGroupStatesGroupRGB_ptsRGB_VoxelRgbmap_trackerGlobal_map 说在前面 最

R3live+PaddleYOLO同步建图和目标检测
1.硬件环境 显卡2080ti,nvidia驱动470.141.03 系统ubuntu18.04,cuda-11.1,TensorRT-7.2.1.6, opencv-3.4.16 Python IDE: Anaconda、Pycharm 2.paddleyolo 2.1 环境搭建 1.源码下载git clone https://github.com/PaddlePaddle/Padd

R3LIVE:一个实时鲁棒、带有RGB颜色信息的激光雷达-惯性-视觉紧耦合系统(香港大学)
目录 基本情况 摘要 I 引言 II 系统框架 III. 数学符号 A.state B. Maps representation<