本文主要是介绍R3live:整体分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
R3LIVE相关参考:
R3LIVE(升级R2LIVE):编译与运行https://blog.csdn.net/handily_1/article/details/122271243?spm=1001.2014.3001.5502
R3live:整体分析
https://blog.csdn.net/handily_1/article/details/122360134?spm=1001.2014.3001.5502
运行代码报错:Failed to load module “canberra-gtk-module“
https://blog.csdn.net/handily_1/article/details/122359275
R3live笔记:(图像处理)视觉-惯性里程计VIO部分
https://blog.csdn.net/handily_1/article/details/122377514
编译
编译运行R3LIVE参考文章:R3LIVE(升级R2LIVE):编译与运行
https://blog.csdn.net/handily_1/article/details/122271243?spm=1001.2014.3001.5502
目录
- 编译
- 1. rviz分析
- 2. ros节点与话题
- 3. launch文件分析
- 4. r3live_config文件分析
- 5. cmakelists.txt
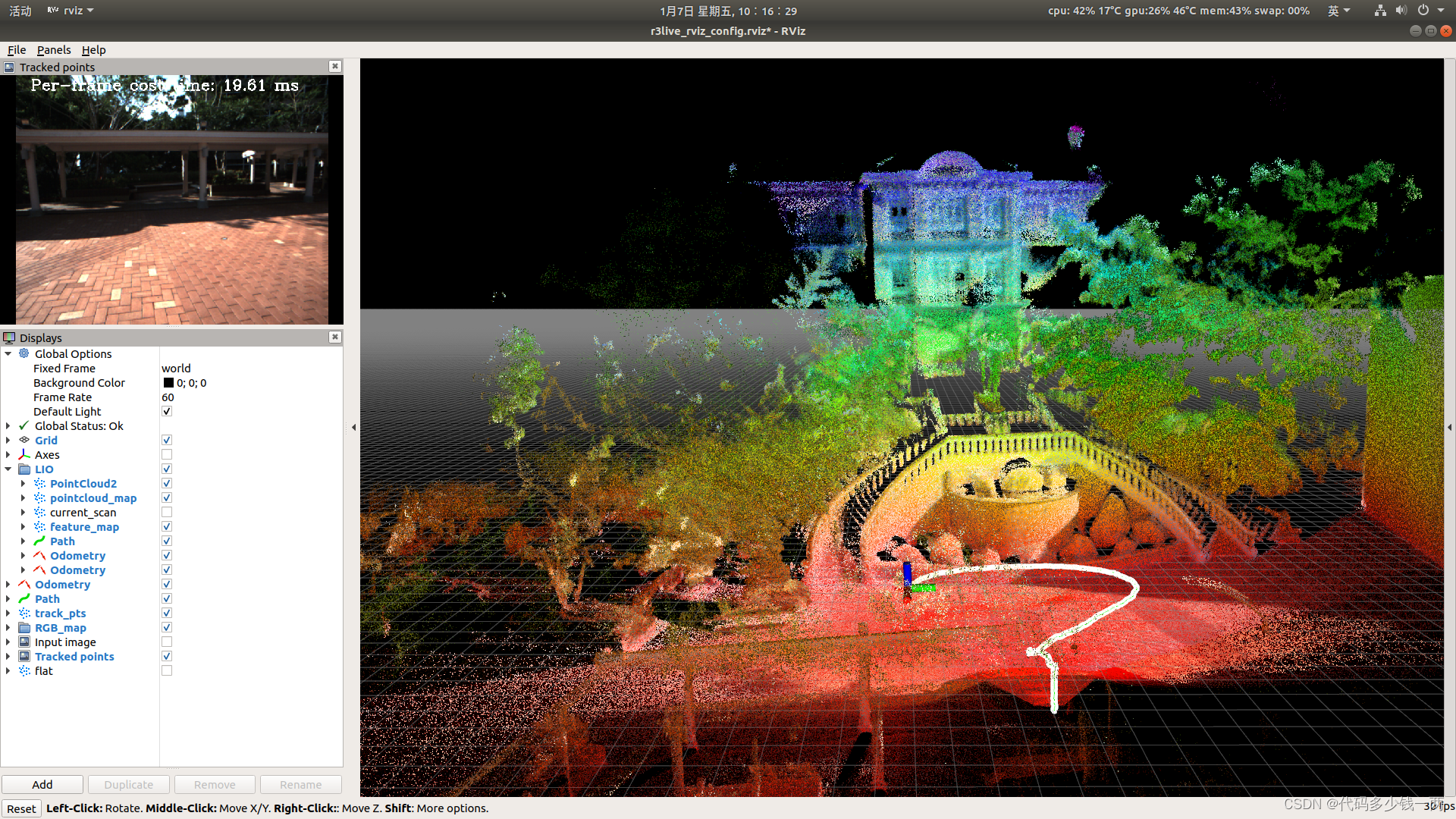
1. rviz分析
简单分析一下rviz中都显示什么内容
- Global Options坐标系:world
- Grid:栅格
- Axes:Fixed Frame的坐标系,不能添加相对于其他坐标系的Axes
- LIO文件夹
pointcloud_map: 订阅的是/cloud_registered,这个就是处理后的全部点云了
current_scan:当前扫描到的全部点,订阅的也是/cloud_registered,Size是5,Alpha是1,Decay是0
feature_map:特征点地图,订阅的是/Laser_map
Path:r3live计算出来的轨迹,订阅的是/path
Odometry:/r2live/odometry 没用到
Odometry:建图的时候的位姿,订阅的是/aft_mapped_to_init
Odometry:相机位姿,订阅的是/camera_odom
Path:视觉计算出的轨迹,订阅的是/camera_path
track_pts:应该是视觉计算出的点云,跑代码的时候"/track_pts"这个话题并没有数据输出 - RGB_map文件夹
这里面全是由不同的 /RGB_map_*话题组成的一张RGB地图 - Input image:rviz显示输入图像
- Tracked points:rviz显示视觉追踪图像
2. ros节点与话题
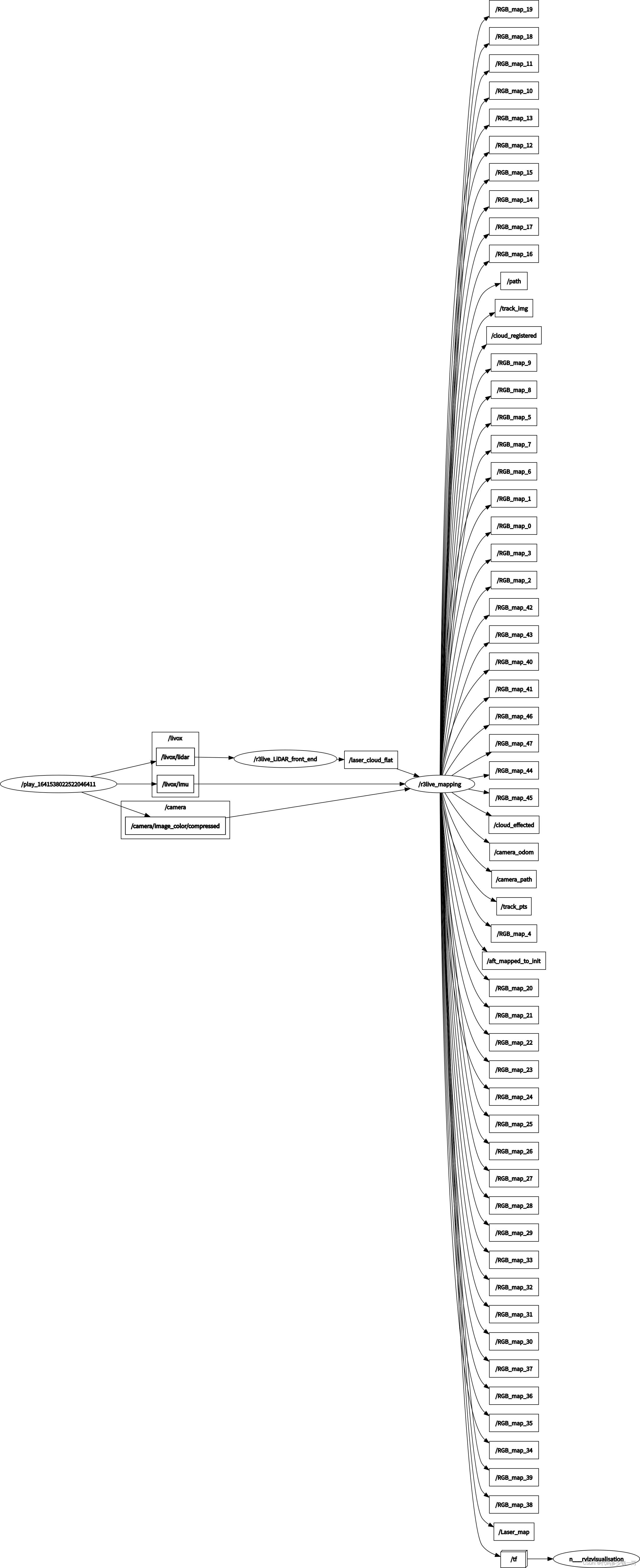
/RGB_map_*话题计较长哈,回头处理一下图片,其实r3live节点与话题和还是很清晰明了的, 一共就/r3live_LiDAR_front_end和/r3live_mapping两个节点:
/r3live_LiDAR_front_end节点算法来自于经典算法LOAM中的特征提取部分,其实也是R2live、fast-lio中都使用到的,他订阅/livox/lidar雷达话题信息,经过处理后发布点云/laser_cloud,平面点/laser_cloud_flat和角点/laser_cloud_sharp信息。
/r3live_mapping节点就订阅平面点/laser_cloud_flat、imu话题/livox/imu和相机(这里的图片是compressed格式)话题/camera/image_color/compressed。发布的话题是前面rviz订阅的所有。
3. launch文件分析
以r3live_bag.launch为例:
<launch><!-- Subscribed topics --><param name="LiDAR_pointcloud_topic" type="string" value= "/laser_cloud_flat" /><param name="IMU_topic" type="string" value= "/livox/imu" /><param name="Image_topic" type="string" value= "/camera/image_color" /><param name="r3live_common/map_output_dir" type="string" value="$(find r3live)/../r3live_output" /><rosparam command="load" file="$(find r3live)/../config/r3live_config_r3live.yaml" /><node pkg="r3live" type="r3live_LiDAR_front_end" name="r3live_LiDAR_front_end" output="screen" required="true"><remap from="/livox/lidar" to="/livox/lidar" /></node><node pkg="r3live" type="r3live_mapping" name="r3live_mapping" output="screen" required="true" /><arg name="rviz" default="1" /><group if="$(arg rviz)"><node name="rvizvisualisation" pkg="rviz" type="rviz" output="log" args="-d $(find r3live)/../config/rviz/r3live_rviz_config.rviz" /></group>
</launch>
- 第一个参数是设置r3live处理的雷达话题,不是livox话题
- 定义imu、Image的topic和地图保存路径
- 加载配置文件r3live_config_r3live.yaml
- 启动r3live_LiDAR_front_end节点和r3live_mapping节点
- 启动rviz
4. r3live_config文件分析
Lidar_front_end:lidar_type: 0 # 1 for Livox-avia, 3 for Ouster-OS1-64N_SCANS: 6using_raw_point: 1point_step: 1r3live_common:if_dump_log: 0 # If recording ESIKF update log. [default = 0]record_offline_map: 1 # If recording offline map. [default = 1]pub_pt_minimum_views: 3 # Publish points which have been render up to "pub_pt_minimum_views" time. [default = 3]minimum_pts_size: 0.01 # The minimum distance for every two points in Global map (unit in meter). [default = 0.01] image_downsample_ratio: 1 # The downsample ratio of the input image. [default = 1]estimate_i2c_extrinsic: 1 # If enable estimate the extrinsic between camera and IMU. [default = 1] estimate_intrinsic: 1 # If enable estimate the online intrinsic calibration of the camera lens. [default = 1] maximum_vio_tracked_pts: 600 # The maximum points for tracking. [default = 600]append_global_map_point_step: 4
r3live_vio:camera_intrinsic: # 相机内参[863.4241, 0.0, 640.6808,0.0, 863.4171, 518.3392,0.0, 0.0, 1.0 ] camera_dist_coeffs: [-0.1080, 0.1050, -1.2872e-04, 5.7923e-05, -0.0222] # 畸变系数k1, k2, p1, p2, k3
# 相机外参camera_ext_R:[-0.00113207, -0.0158688, 0.999873,-0.9999999, -0.000486594, -0.00113994,0.000504622, -0.999874, -0.0158682]camera_ext_t: [0,0,0] r3live_lio: lio_update_point_step: 4 # Point step used for LIO update. max_iteration: 2 # Maximum times of LIO esikf.lidar_time_delay: 0 # The time-offset between LiDAR and IMU, provided by user. # 体素大小filter_size_corner: 0.30 filter_size_surf: 0.30filter_size_surf_z: 0.30filter_size_map: 0.30
5. cmakelists.txt
- 生成r3live_LiDAR_front_end可执行文件
add_executable(r3live_LiDAR_front_end src/loam/LiDAR_front_end.cpp)
target_link_libraries(r3live_LiDAR_front_end ${catkin_LIBRARIES} ${PCL_LIBRARIES})
- 生成r3live_cam_cali_create_cali_board可执行文件
if(Ceres_FOUND)message(STATUS "===== Find ceres, Version ${Ceres_VERSION} =====") include_directories(${CERES_INCLUDE_DIRS})add_executable(r3live_cam_cali src/r3live_cam_cali.cpp)target_link_libraries(r3live_cam_cali ${catkin_LIBRARIES} ${OpenCV_LIBRARIES} ${CERES_LIBRARIES})add_executable(r3live_cam_cali_create_cali_board src/r3live_cam_cali_create_cali_board.cpp)target_link_libraries(r3live_cam_cali_create_cali_board ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})
endif()
- 生成r3live_mapping可执行文件
add_executable(r3live_mapping src/r3live.cpp src/r3live_lio.cppsrc/loam/include/kd_tree/ikd_Tree.cppsrc/loam/include/FOV_Checker/FOV_Checker.cpp src/loam/IMU_Processing.cppsrc/rgb_map/offline_map_recorder.cpp#From VIOsrc/r3live_vio.cppsrc/optical_flow/lkpyramid.cppsrc/rgb_map/rgbmap_tracker.cppsrc/rgb_map/image_frame.cppsrc/rgb_map/pointcloud_rgbd.cpp)
target_link_libraries(r3live_mapping ${catkin_LIBRARIES}${Boost_LIBRARIES}${Boost_FILESYSTEM_LIBRARY}${Boost_SERIALIZATION_LIBRARY} #serialization${OpenCV_LIBRARIES}#${OpenMVS_LIBRARIES}pcl_common pcl_io)
- 生成r3live_meshing可执行文件
FIND_PACKAGE(CGAL REQUIRED)
if(CGAL_FOUND)include_directories(${CGAL_INCLUDE_DIRS})add_definitions(${CGAL_DEFINITIONS})link_directories(${CGAL_LIBRARY_DIRS})ADD_DEFINITIONS(-D_USE_BOOST -D_USE_EIGEN -D_USE_OPENMP)SET(_USE_BOOST TRUE)SET(_USE_OPENMP TRUE)SET(_USE_EIGEN TRUE)
#生成r3live_meshing可执行文件add_executable(r3live_meshing src/r3live_reconstruct_mesh.cpp src/rgb_map/image_frame.cppsrc/rgb_map/pointcloud_rgbd.cpp # Commonsrc/meshing/MVS/Common/Common.cppsrc/meshing/MVS/Common/Log.cppsrc/meshing/MVS/Common/Timer.cppsrc/meshing/MVS/Common/Types.cppsrc/meshing/MVS/Common/Util.cpp# MVS src/meshing/MVS/Mesh.cppsrc/meshing/MVS/PointCloud.cppsrc/meshing/MVS/Camera.cppsrc/meshing/MVS/Platform.cppsrc/meshing/MVS/PLY.cppsrc/meshing/MVS/OBJ.cppsrc/meshing/MVS/IBFS.cpp)
target_link_libraries(r3live_meshing ${catkin_LIBRARIES}${Boost_LIBRARIES}${Boost_FILESYSTEM_LIBRARY}${Boost_SERIALIZATION_LIBRARY} # serialization${CGAL_LIBS}${OpenCV_LIBRARIES}${JPEG_LIBRARIES} gmppcl_common pcl_iopcl_kdtree)endif()
这篇关于R3live:整体分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





