probe专题

k8s-pod 实战三 (Liveness Probe 和 Readiness Probe 详细分析)
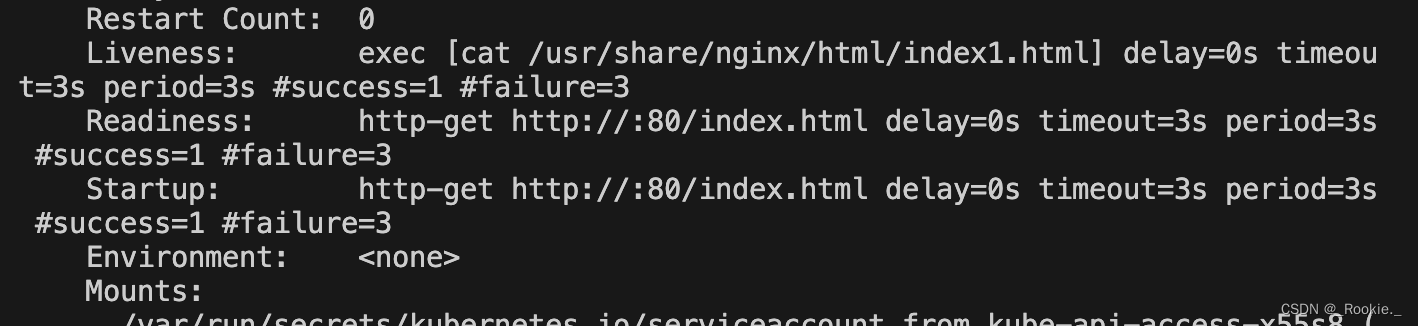
一、Liveness Probe 和 Readiness Probe 详细分析 Liveness Probe Liveness Probe 用于检查容器是否处于健康状态。如果探针失败,Kubernetes 会杀死容器并根据重启策略决定是否重启。这对于检测和恢复应用程序中的死锁或其他致命错误非常有用。 Readiness Probe Readiness Probe 用于检查容器是否准备好接受

linux设备上的Onvif 实现5:实现Probe命令检测设备
学习Onvif的最关键步骤就是设备发现,一般来说开发的设备都是客户端,只要能被服务端正确发现就大功告成啦! 本文分别实现了客户端和服务端的识别流程,可以配合起来运行测试。 第一部分:实现Probe检测实例 代码目录: \\192.168.0.234\work\gaoht\gsoap\test \\192.168.0.234\work\gaoht\gsoap\probe-sample G
Gallery Set与Probe set
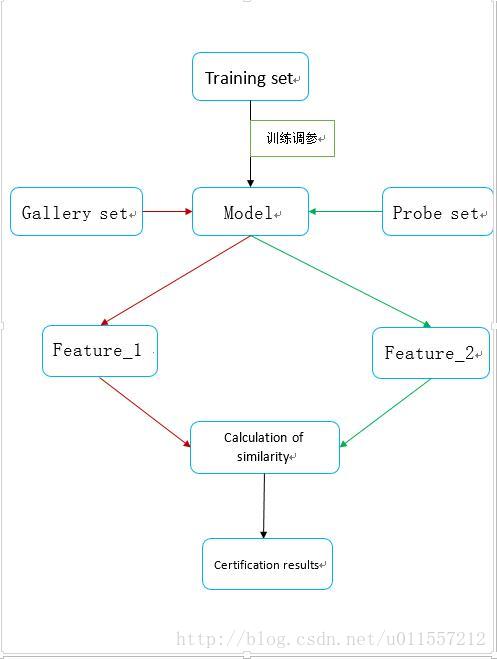
0 前言 在 Face Recognition 数据集一般会经常看到这三个数据集 Training set 、Gallery set and Probe set。第一次看到的时候也是晕晕的懵懵的,然后自己查阅了一些资料以后也是没有明白啊 后来老师给解释了一下是什么意思。在这里就算是给自己Mark一下。 1 解释 我自己大体画了一下这个意思 在FaceRecognition中一般的是训练

Tomcat性能监控工具Probe Quick Start
Tomcat版本:6.0.41 Probe版本:2.3.3 一,Tomcat没有默认用户账号,故首先需要添加Tomcat用户账号 修改$CATALINA_HOME/conf/tomcat-users.xml: [html] view plain copy <tomcat-users> <!-- 用户角色 --> <role rolename="manager"/>
vivado HW_ILA_DATA、HW_PROBE
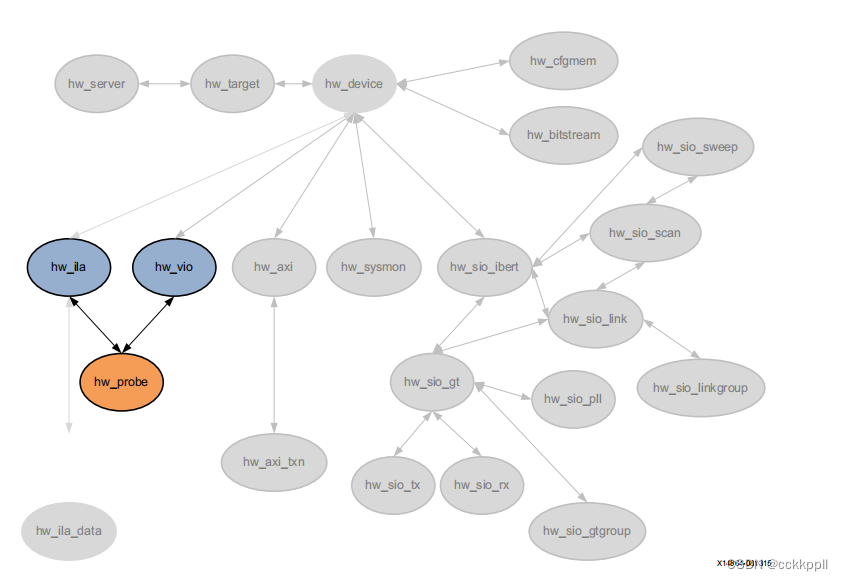
HW_ILA_DATA 描述 硬件ILA数据对象是ILA调试核心上捕获的数据的存储库 编程到当前硬件设备上。upload_hw_ila_data命令 在从ila调试移动捕获的数据的过程中创建hw_ila_data对象 核心,hw_ila,在物理FPGA上,hw_device。 read_hw_ila_data命令还可以在读取 来自磁盘的ILA数据文件。 hw_ila_data对象可以在Vivado

probe和 match
草稿: platform_driver_register __platform_driver_register driver_register bus_add_driver driver_attach bus_for_each_dev (有如下调用:fn(dev, data);指的就是__driver_attach) __driver_attach driver_match_d
K8S哲学 - probe 探针
探针分类: liveness probe readiness probe startup probe Liveness Probe:用于检查容器是否还在运行。如果 Liveness Probe 失败,Kubernetes 会杀死容器,然后根据你的重启策略来决定是否重新启动容器。常见的做法是使用与 Readiness Probe 相同的低成本 HTTP 端点,但是设置更高的 failureT
如何判断驱动中probe是否执行
在我们调试驱动程序的时候需要查看probe函数是否执行,我们只需要在其probe函数写一个printk函数即可,在驱动和设备匹配之后就会执行这个probe里面的打印函数 但是前提我们需要降低内核的打印级别,否则是看不到的,我们可以降到最低: 执行这句 : echo 8 > /proc/sys/kernel/printk ,就可以看到相应的打印信息了 补充: 这里有八个级别,0-7,数字越
uvc的VS_PROBE_CONTROL和VS_COMMIT_CONTROLOL数据格式分析工具
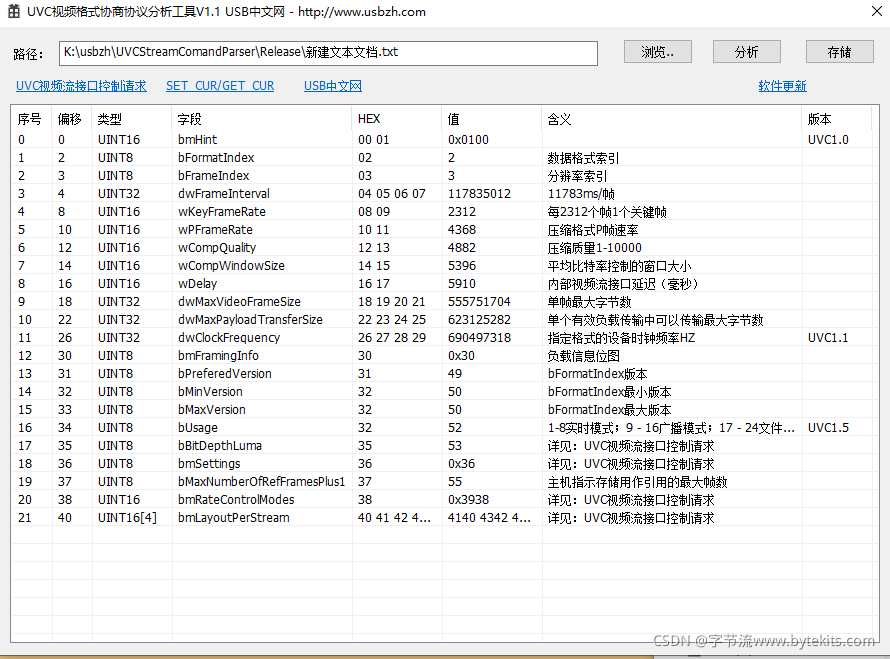
直接拖一下UVC枚举过程中的GET_CUR或SET_CUR数据,然后存成文件,打开分析即可见到这个格式的分析。支持文件拖拽功能。 更多关于可见USB中文网:http://www.usbzh.com/article/detail-668.html

SQL 术语:Join 中的 Build 和 Probe 是什么意思?
博主历时三年精心创作的《大数据平台架构与原型实现:数据中台建设实战》一书现已由知名IT图书品牌电子工业出版社博文视点出版发行,点击《重磅推荐:建大数据平台太难了!给我发个工程原型吧!》了解图书详情,京东购书链接:https://item.jd.com/12677623.html,扫描左侧二维码进入京东手机购书页面。 我们可能在一些介绍数据库 Join 档中看到 Build 和 Probe,分别代
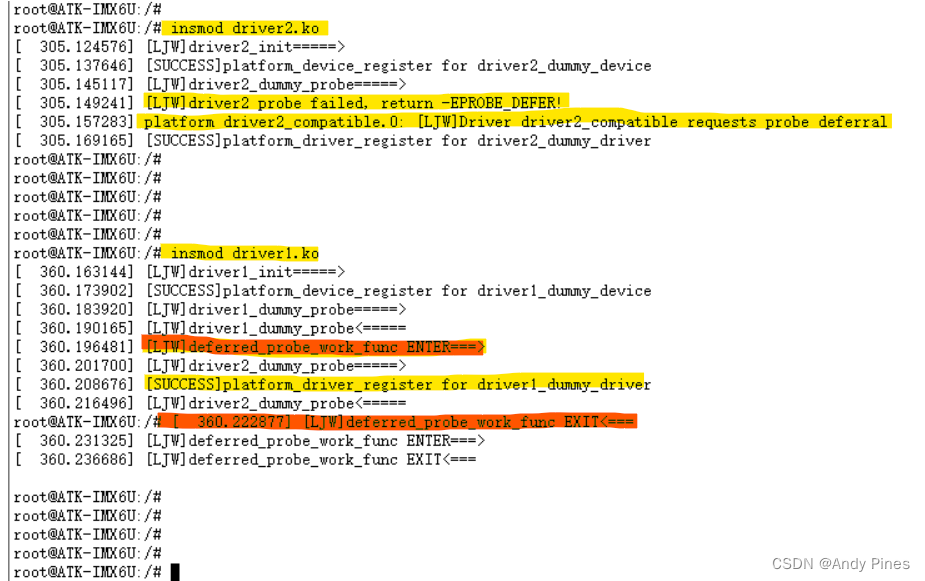
linux driver probe deferral 机制
1. 背景介绍 在偶然的一次实验中(具体是pinctrl实验),我发现有些平台的pincontroller驱动起得很晚,而pinctrl client驱动却起得很早,在设备驱动模型中probe之前又会进行管脚复用的相关设置,按照常理来讲,这就产生了某种依赖性: pincontroller必须尽早启动,否则pinctrl client无法使用管脚复用功能,但实际上的效果并非如此,尽管pincont

Linux Device和Driver注册过程中的Probe时机
转载本文解释linux下设备和驱动的不同注册顺序时设备probe的时机;增加两个case以解决PCI/USB等可热插拔设备不同插入过程的probe时机的疑问。 Linux 2.6的设备驱动模型中,所有的device都是通过Bus相连。device_register() / driver_register()执行时通过枚举BUS上的Driver/Device来实现绑定,本文详解这一过程。这是整个L
linux中 probe函数的何时调用的?
linux中 probe函数何时调用的 所以的驱动教程上都说:只有设备和驱动的名字匹配,BUS就会调用驱动的probe函数,但是有时我们要看看probe函数里面到底做了什么,还有传递给probe函数的参数我们就不知道在哪定义(反正不是我们在驱动里定义的),如果不知道传递进的参数,去看probe函数总是感觉不求甚解的样子(你对系统不求甚解,系统也会对你的要求不求甚解的),心里

linux中probe函数传递参数的寻找(下)
linux中probe函数传递参数的寻找(下) 通过追寻driver的脚步,我们有了努力的方向:只有找到spi_bus_type的填充device即可,下面该从device去打通,当两个连通之日,也是任督二脉打通之时。先从设备定义去查看,在mach-smdk6410.c中定义了硬件设备信息,从这作为突破口。 /* for mx25lx*/ static void c

linux中probe函数中传递的参数来源(上)
linux中probe函数传递参数的寻找(上) 上一篇中,我们追踪了probe函数在何时调用,知道了满足什么条件会调用probe函数,但probe函数中传递的参数我们并不知道在何时定义,到底是谁定义的,反正不是我们在驱动中定义的(当然,驱动中也不会定义设备的详细信息),但也不是在我们设备信息定义时的结构体。这就相当于武林绝学中只打通了任脉,而督脉还没打通,要想成为武林高手还
probe()何时被调用
1:新设备注册后,总线先match() device id, 绑定合适的驱动后,调用驱动的probe(). 2:新驱动注册后,总线先match() device id,给驱动支持的, 未绑定驱动的设备绑定驱动,并把设备添加到驱动支持的设备链表尾部.然后调用probe(). --> driver_register()--> bus_add_driver()--> driver_attach()

Error initializing emulator: The XDS200 update cannot work if more than one XDS2xx probe is attached
更换成2020年的新版本CCS,再次去调试DSP程序的时候报错:Error initializing emulator: The XDS200 update cannot work if more than one XDS2xx probe is attached. 此时 选择Continue直接完毕,如果选择update选项则: 继续,得到另外的提示:Error initializing emu

如何解决 DNS 解析错误(DNS_PROBE_FINISHED_NXDOMAIN)问题
如何解决 DNS 解析错误(DNS_PROBE_FINISHED_NXDOMAIN)问题 导语: 当你在访问网站时遇到 DNS 解析错误(DNS_PROBE_FINISHED_NXDOMAIN)时,可能是由于本地 DNS 缓存导致的问题。这里介绍一种简单且常见的解决方法,即通过刷新本机的 DNS 缓存来解决该问题。 步骤 1:打开命令提示符 首先,我们需要打开命令提示符。你可以按下 Wi
Linux驱动 device 的probe函数是怎么被调用的
今天正好有空,研究了一下platformdevice的probe函数时如何被调用的。我觉得这个过程应该可以推广到一般设备的探测函数的调用。 以mini2440中的watchdog为例。 先看配置文件中对watchdog的设置: [cpp] view plain copy print ? static struct resource s3c_wdt_resource[]
platform_driver_register()--如何match之后调用probe
int platform_driver_register(struct platform_driver *drv) { drv->driver.bus = &platform_bus_type;/*关联总线*/ /*关联driver的设备方法*/ if (drv->probe) drv->driver.probe = platform_
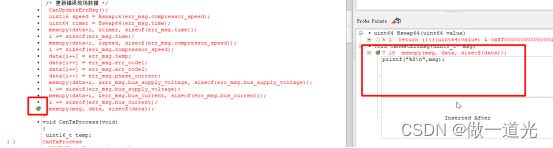
vectorCast——Probe point 功能实现故障注入,局部变量打印,断点调试。
选择一个测试用例,选择coverage窗口进行查看。点击edit probe point,如图所示绿色的小圆圈。选代码中选择需要打断点的地方进行点击。黑色的小圆点都可以选。点击黑色小圆点,小圆点变绿,表示打断点成功。此时就可以根据自己的需求在打断点的位置编写一些C语言的命令语句。点击编译,成功会弹出窗口显示编译成功,

RK3399平台入门到精通系列讲解(USB篇)UDC 层 usb_gadget_probe_driver 接口分析
🚀返回总目录 文章目录 一、UDC:usb_gadget_probe_driver函数分析二、usb_gadget_driver 结构详细介绍三、usb_udc 结构详细介绍 一、UDC:usb_gadget_probe_driver函数分析 UDC层的一项基本任务是向上层提供usb_gadget_probe_driver()接口函数。 上层调用者为composit
嵌入式 linux中probe函数中传递的参数来源(上)
应该是设备注册的时候,内核将设备信息挂到上面去的,按照这个猜想,我们应该先从设备注册入手,但是这么多函数到底朝哪个方向努力呀?所以,先从传递的参数入手,查看下,等走不通了在去从设备注册入手,起码有了努力的方向了。 调用probe函数的是:static int really_probe(struct device *dev, struct device_driver*drv),里面有调用ret
嵌入式 linux中probe函数传递参数的寻找(下)
通过追寻driver的脚步,我们有了努力的方向:只有找到spi_bus_type的填充device即可,下面该从device去打通,当两个连通之日,也是任督二脉打通之时。先从设备定义去查看,在mach-smdk6410.c中定义了硬件设备信息,从这作为突破口。 /* for mx25lx*/ static void cs_set_level(unsigned line_id, int
嵌入式 probe()函数是什么时候被调用,设备和驱动是怎么联系起来的
probe()函数是什么时候被调用,设备和驱动是怎么联系起来的?? platform_add_devices(ldd6410_devices, ARRAY_SIZE(ldd6410_devices)); //这是bsp中添加所有的设备--》 platform_device_register(devs[i]);//注册平台设备---》platform_device_add(pdev);将
邻居表项的delay_probe_time时长
delay_probe_time控制首次发送邻居请求报文的等待时长,对于arp协议,内核默认的delay_probe_time时长为5秒钟。 struct neigh_table arp_tbl = {.family = AF_INET,.key_len = 4,.protocol = cpu_to_be16(ETH_P_IP),.hash = arp_hash,.