prewitt专题


prewitt算子实现
原理: 实现: /*** @description: prewitt算子* @param src 输入图像* @param dst 输出图像*/void prewitt(cv::Mat& src, cv::Mat& dst){cv::Mat getPrewitt_horizontal = (cv::Mat_<float>(3, 3) << -1, -1, -1, 0, 0, 0, 1,

《opencv实用探索·十一》opencv之Prewitt算子边缘检测,Roberts算子边缘检测和Sobel算子边缘检测
1、前言 边缘检测: 图像边缘检测是指在图像中寻找灰度、颜色、纹理等变化比较剧烈的区域,它们可能代表着物体之间的边界或物体内部的特征。边缘检测是图像处理中的一项基本操作,可以用于人脸识别、物体识别、图像分割等多个领域。 边缘检测实质上是计算当前点和周围点灰度的差别。 图像边缘检测流程主要分为以下几个步骤: (1)读取待处理图像; (1)图像滤波,例如使用高斯滤波器,平滑图像,去除噪声; (2

OpenCV 笔记(9):常用的边缘检测算子—— Roberts、Prewitt、Sobel
在本文开始之前,我们先了解一下算子的概念。 算子英语是 Operator,它是一个函数空间到函数空间上的映射 O:X→X。广义上的算子可以推广到任何空间。 函数是从数到数的映射。 泛函是从函数到数的映射。 算子是从函数到函数的映射。 算子不等同于函数,也不等同于算法。算法是更为广泛的概念,它包含了算子。 Part11. Roberts 算子 我们知道用 L1 范数来近似梯度的幅度: 其中,
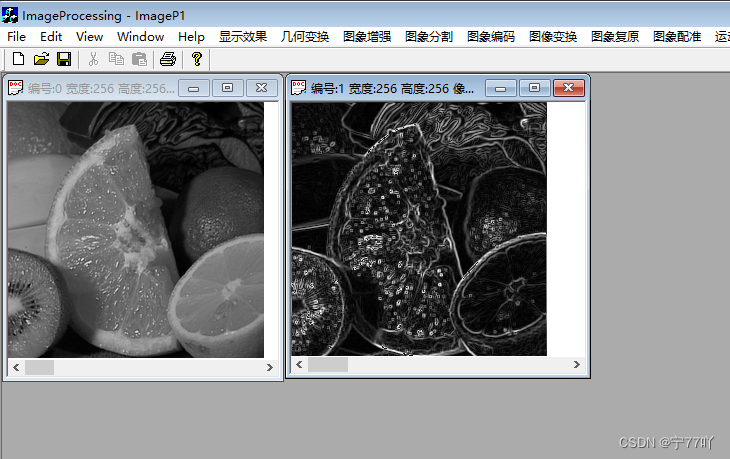
使用VC++实现锐化处理(使用Sobel算子、Prewitt算子、Isotropic算子)
使用VC++实现锐化处理(使用Sobel算子、Prewitt算子、Isotropic算子) 获取源工程可访问gitee可在此工程的基础上进行学习。 该工程的其他文章: 01- 一元熵值、二维熵值 02- 图像平移变换,图像缩放、图像裁剪、图像对角线镜像以及图像的旋转 03-邻域平均平滑算法、中值滤波算法、K近邻均值滤波器 04-分段线性变换,直方图均衡化、锐化处理 05-基于拉普拉斯算子、Ca