pnp专题

Windows驱动_UMDF驱动之二UMDF电源管理和PNP操作
一、Framework Objects(框架对象) UMDF中一般会使用到如下的框架对象: Driver ObjectIWDFDriver驱动对象Device ObjectIWDFDeivce设备对象File ObjectIWDFFile文件对象Interrupt ObjectIWDFInterrupt中断对象Queue ObjectIWDFIoQueue队列对象Request

SLAM ORB-SLAM2(29)PnP估计姿态
SLAM ORB-SLAM2(29)PnP估计姿态 1. PnP问题2. EPnP算法2.1. 计算4对控制点的世界坐标2.2. 计算齐次质心坐标2.3. 计算4对控制点的相机坐标2.3.1. 构造M矩阵2.3.2. 计算 M T M M^TM MTM的0特征值对应的特征向量2.3.3. 计算零空间的秩2.3.4. 计算线性组合的系数 2.4. 选择最小重投影误差 3. 标题
WDF驱动开发-PNP和电源管理(三)
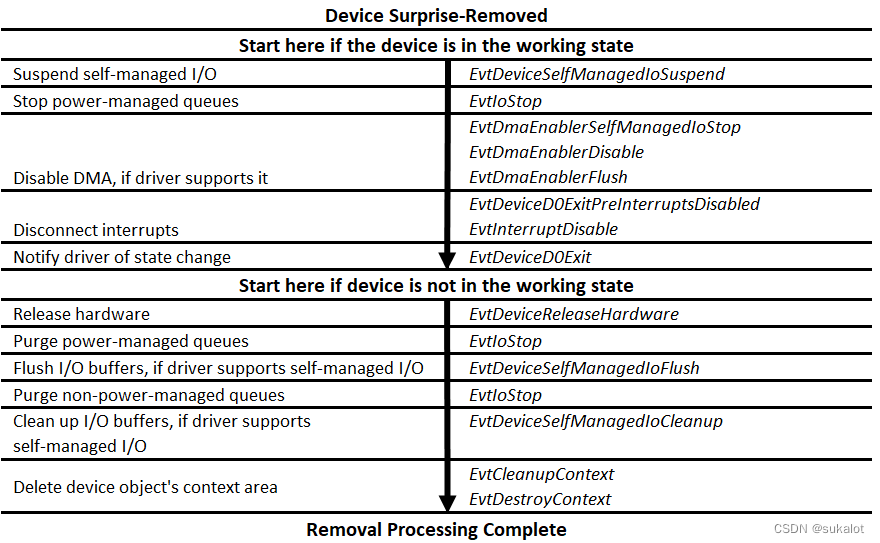
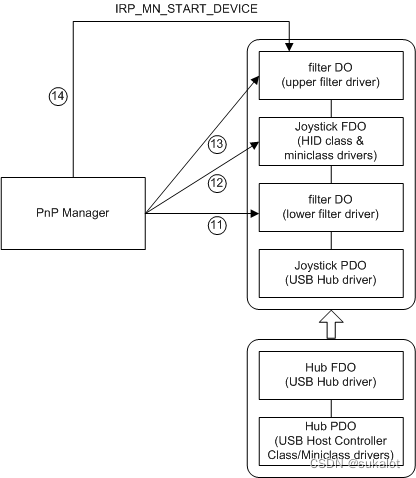
对于PNP设备来说,理解它们的启动和删除顺序,以及意外移除顺序非常重要,在早期,经常有拔插U盘导致windows重启的例子,这就是意外移除带来的问题。 功能或Filter驱动程序的启动顺序 下图显示了框架调用 WDF (KMDF 和 UMDF V2) 功能或Filter驱动程序的事件回调函数的顺序,从图底部的“设备插入”状态开始: 宽横线标记启动设备所涉及的步骤。 图左侧的列描述了步骤,
windows驱动开发-PNP管理器
PNP技术是由Microsoft提出的,英文Plug and play的缩写,中译即插即用,意思是系统自动侦测周边设备和板卡并自动安装设备驱动程序,做到插上就能用,无须人工干预,是Windows自带的一项技术。所谓即插即用是指将符合PNP标准的PC插卡等外围设备安装到电脑时,操作系统自动设定系统结构的技术。这就是说,当用户安装新的硬件时,不必设置任何跳线器开关,也不必用软件配置中断请求、内存地址或

Baumer工业相机堡盟工业相机如何通过NEOAPISDK使用相机的Plug-and-Play(即插即用PnP)技术(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK使用相机的Plug-and-Play(即插即用PnP)技术(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和相机即插即用技术的技术背景Baumer工业相机通过NEOAPISDK使用相机的即插即用技术1.引用合适的类文件2.通过NEOAPISDK在相机中使用相机的即插即用技术 Baumer工业相机通过SDK使用相机

3D视觉(六):PnP问题(pespective-n-point)
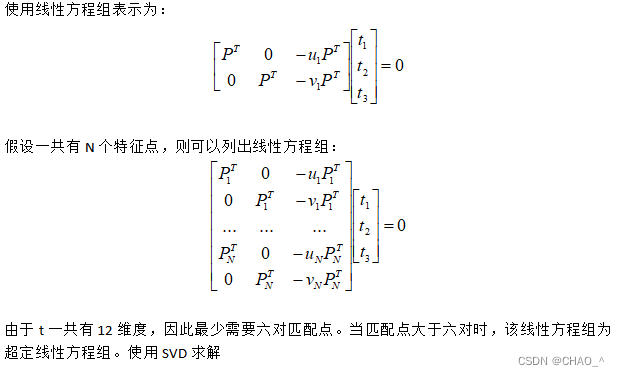
3D视觉(六):PnP问题(pespective-n-point) PnP问题,是指已知3D点(x, y, z)及其在相机上的投影(u,v),求解相机位姿变换R、T。 投影方程可表示为: 这里K为相机内参矩阵,是已知的。我们要做的就是,从n对这样的2D-3D对应关系中,恢复出相机姿态变换,即旋转矩阵R和平移向量t。 文章目录 3D视觉(六):PnP问题(pespective-n-poin

多路NPN信号转TTL电平/PNP/TTL电平转0-24V电平
特点: ● 8路NPN信号转PNP信号高速转换 ● 8路0-5V电平转0-24V电平 ● 8路TTL电平转0-24V电平 ● 8路NPN信号转TTL电平 ● 8路0-24V电平转0-5V电平 ● 支持输入信号和输出信号电平翻转。 ● 电平转换速度可达1MHz ● 信号输入 / 输出之间隔离耐压3000VDC ● 宽电源供电范围:8 ~ 32VDC ● 标准DIN35导轨安装,方便集中布线 典型应

【电路笔记】-PNP晶体管
PNP晶体管 文章目录 PNP晶体管1、概述2、PNP晶体管电路示例3、PNP晶体管识别 1、概述 PNP 晶体管与我们在上一篇教程中看到的 NPN 晶体管器件完全相反。 在这种类型的 PNP 晶体管结构中,两个互连的二极管相对于之前的 NPN 晶体管是相反的。 这会产生正-负-正类型的配置,箭头也定义了 PNP 晶体管符号中指向内的发射极端子。 此外,PNP 晶体管的所
EPnP和PnP问题
EPnP:https://zhuanlan.zhihu.com/p/59070440 PnP (DLT):https://zhuanlan.zhihu.com/p/58648937
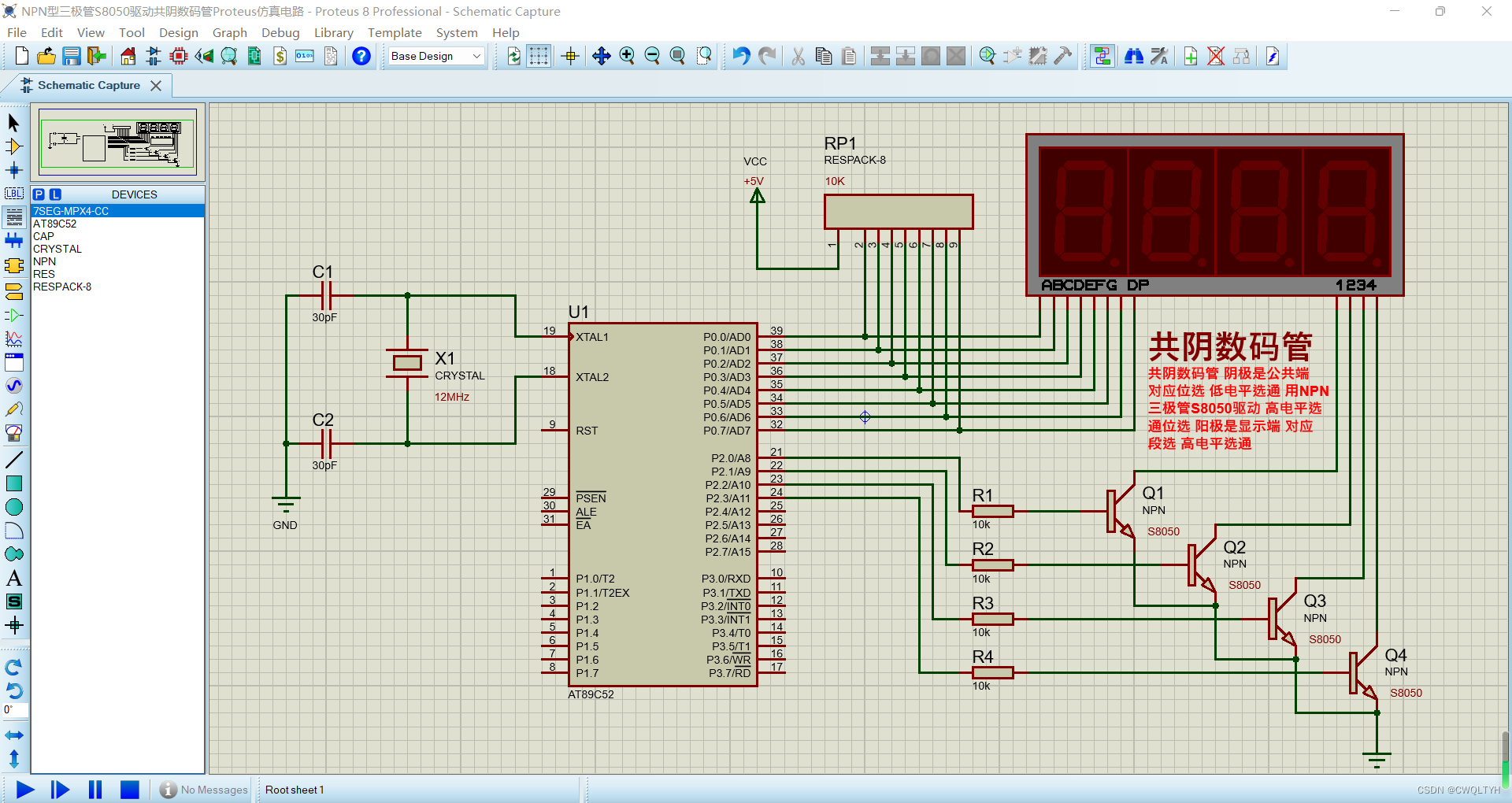
基于STC系列单片机实现PNP型三极管S8550驱动共阳数码管或NPN型三极管S8050驱动共阴数码管功能
Digitron.c #include "Digitron.h"//#include "Key.h"#define uchar unsigned char//自定义无符号字符型为uchar#define uint unsigned int//自定义无符号整数型为uint//uchar code DigitronBitCodeArray[] = {0x01,0x02,0x04,0x08,
NPN型三极管与PNP型三极管基本原理
NPN型三极管与PNP型三极管基本原理 文章目录 NPN型三极管与PNP型三极管基本原理一、三极管二、结构三、工作原理四、基本应用五、总计 一、三极管 三极管是电子电路中最基本、最常见、重要的器件,其主要功能是对电流的放大和开关作用,从半导体结构上可以分为NPN型和PNP型,本文简单介绍其原理、区别及基本用法: 二、结构 NPN型三极管: 由两块N型半导体和一块P型
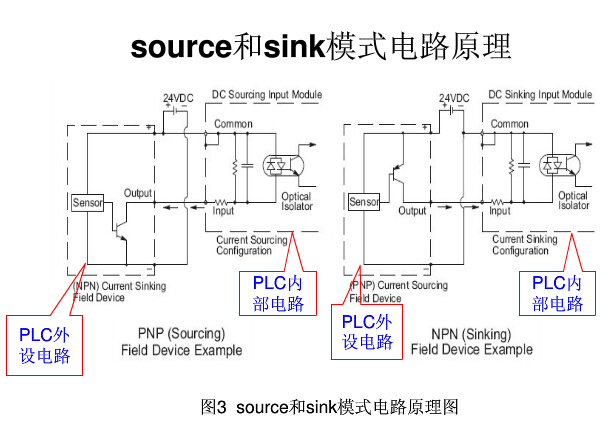
输入/输出 PNP/ NPN SOURCE/SINK的问题
1.什么是输入,什么是输出? 判断输入和输出端 和电流方向是没有关系的。 接受外界信号改变的一端是输入端。由输入端引起的变化,就可以叫做输出。 例如:传感器要接受信号,可以说传感器是输入端。但是PLC要读取传感器的电平,此时 传感器输出的信号相对于PLC,就叫输出端。 2.什么是NPN,什么是PNP? 一般说NPN,PNP指的是输出类型。 传感器分NPN型和PNP型:一般三级管指

常用函数两个C函数 pnp_log basename
不使用 printf的时候用 #include <unistd.h> #include <fcntl.h> static void pnp_log(const char *s) { int fd,size; fd=open("/tmp/pnp_check",O_WRONLY|O_APPEND|O_CREAT); write(fd,s,strlen(s)+1); write(fd,"

好记性不如烂笔头--PNP NPN区别及 S8050 S8550
NPN是用B→E 的电流(IB)控制C→E 的电流(IC),E极电位最低,且正常放大时通常C 极电位最高,即VC > VB > VE PNP是用E→B 的电流(IB)控制E→C 的电流(IC),E极电位最高,且正常放大时通常C 极电位最低,即VC NPN电路中,E最终都是接到地板(直接或间接),C最终都是接到天花板(直接或间接)。PNP电路则相反,C最终都是接到地板(直接或间接),E最终都
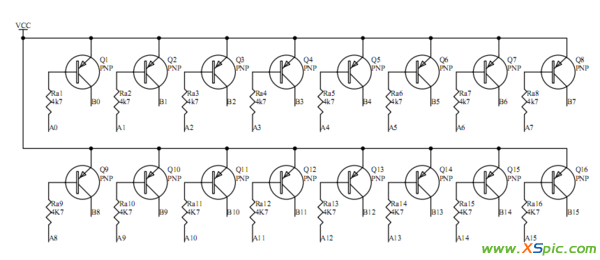
多路NPN信号转TTL电平/PNP/TTL电平转0-24V电平
特点: ● 8路NPN信号转PNP信号高速转换 ● 8路0-5V电平转0-24V电平 ● 8路TTL电平转0-24V电平 ● 8路NPN信号转TTL电平 ● 8路0-24V电平转0-5V电平 ● 支持输入信号和输出信号电平翻转。 ● 电平转换速度可达1MHz ● 信号输入 / 输出之间隔离耐压3000VDC ● 宽电源供电范围:8 ~ 32VDC ● 标准DIN35导轨安装,方便集中布线 典型应

我感觉我自己基于pnp原理可以自己写个简单的SLAM了,而且还是VIO的。是的,可以自己推出。
我感觉我自己基于pnp原理可以自己写个简单的SLAM了,而且还是VIO的。 是的,可以自己推出。 我们就把二维码泛化成普通的东西,只是我们不知道边长,如果我们知道了,那就可以用pnp的原理倒推出相机的位姿。 这个边长比如我们是不是可以通过双目深度图得到?这样不就很多问题解决了!!!!! 自己这样就可以推导出一个SLAM了!!! 加上有IMU可以感知自己位姿的

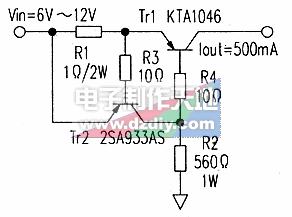
两只PNP晶体三极管和四个电阻组成恒流源电路
晶体管Tr1和电阻R1、R4、R2组成主电路.R2与R4串联后组成晶体管Tr1基极的上偏置电阻。当电源接通之后,由于在基极中有电流流动,Tr1中就会有集电极电流流过,发射极电流流过R1后在R1两端会产生电压降。当R1两端的电压降达到0.6V时,Tr2会随之导通,Tr2的集电极电流流经R2.对Tr1的基极电流形成分流.Tr1的基极电流会随之减小,集电极电流也随之减小。因此Tr2导通之后会对Tr
使用pnp添加或者更新一个field的值
我们知道可以使用如下代码添加一条item,其中add方法接受一个json对象: sp.web.lists.getByTitle("List Title").items.add({EntityPropertyName: value1, EntityPropertyName: value2}).then(r=>{console.log(r);}).catch(e=>{console.log(e);}

活动报名 | CVPR最佳学生论文:通用的概率n点透视(PnP)算法
本期为青源LIVE第48期线上直播活动,参与直播互动有惊喜🎁! 单目物体位姿估计是指通过单张图像确定其中物体在相机坐标系中的位置和朝向。因单张图像只有2D信息,没有直接的深度信息,因此物体的准确定位具有较大的挑战性。现有的基于n点透视(PnP)算法估计物体位姿的方法需要通过深度网络去预测物体的2D-3D关联点,但网络的训练往往是以回归特定点的2D或3D坐标为目标,而不是以最小化物体位姿误差为

【五一硅谷区块链峰会探秘】张首晟院士、ConsenSys、PNP、TechCrunch携手全球名企大咖齐聚2018GDIS峰会!...
GDIS区块链时代即将于2018年5月1日 在美国硅谷盛大召开! 大咖云集、名企荟萃 众多区块链独角兽鼎力加盟 峰会全程干货,主题深入浅出 区块链应用究竟有何奥秘? 在当下区块链技术浪潮来临的时间关口,硅谷商学院(Silicon Valley Business Institute)将举办2018全球颠覆性创新峰会(GDIS):区块链时代,通过爆炸式信息和经验交流,融合东西方前沿资源,以全球
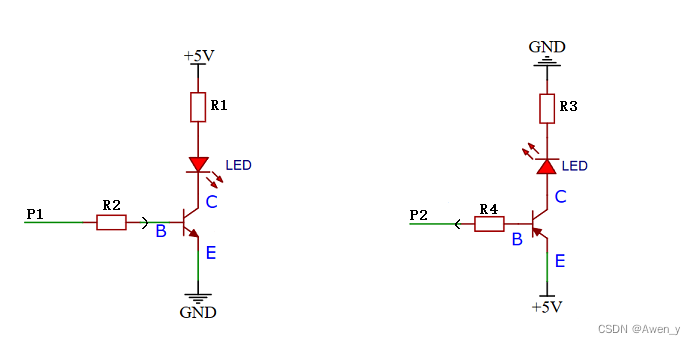
pnp三极管放大时为什么要在基极加上限流电阻啊?这样岂不是等于说把放大的电流又弄小了··~~就是在led点
pnp三极管放大时为什么要在基极加上限流电阻啊?这样岂不是等于说把放大的电流又弄小了··~~就是在led点 信息举报 题目: pnp三极管放大时为什么要在基极加上限流电阻啊?这样岂不是等于说把放大的电流又弄小了··~~就是在led点 我以前也试过.没有在基极加电阻,直接接信号的,也可以.不过当时我没有注意亮度的变化.求分析.能不能去掉? 是用在16*16led点阵显示屏


百度为Dapp推出PNP区块链平台
点击上方 “蓝色字” 可关注我们! 暴走时评: 本周四,百度云平台发表正式公告,宣布推出百度区块链引擎(BBE)平台,旨在简化商用dapp的部署。称该平台为一种允许开发人员“像开发移动应用程序一样”去开发区块链应用程序的操作系统,同时能够绕过目前限制区块链发展的存储和计算“瓶颈”。 作者:Daniel Palmer 翻译:Maya 中国搜索引擎巨头百度推出了一个区块链平台,旨