perception专题

论文泛读: TransNeXt: Robust Foveal Visual Perception for Vision Transformers
文章目录 TransNeXt: Robust Foveal Visual Perception for Vision Transformers论文中的知识补充非QKV注意力变体仿生视觉建模 动机现状问题 贡献方法 TransNeXt: Robust Foveal Visual Perception for Vision Transformers 论文链接: https://o
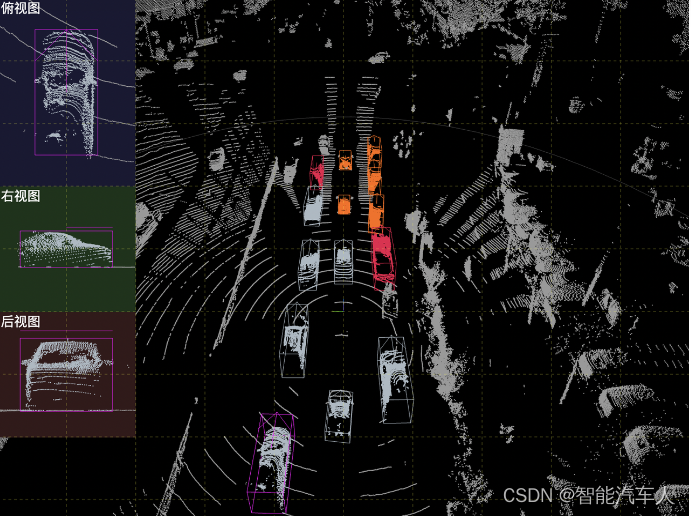
自动驾驶---Perception之Lidar点云3D检测
1 背景 Lidar点云技术的出现是基于摄影测量技术的发展、计算机及高新技术的推动以及全球定位系统和惯性导航系统的发展,使得通过激光束获取高精度的三维数据成为可能。随着技术的不断进步和应用领域的拓展,Lidar点云技术将在测绘、遥感、环境监测、机器人等领域发挥越来越重要的作用。 目前全球范围内纯视觉方案的车企主要包括特斯拉和集越,在达到同等性能的前提下,纯视觉方

自动驾驶---Perception之IPM图和BEV图
1 前言 IPM(Inverse Perspective Mapping,逆透视变换)图的历史可以追溯到计算机视觉和图像处理领域的发展。逆透视变换是一种用于消除图像中透视效应的技术,使得原本由于透视产生的形变得以纠正,进而更准确地描述和理解图像中的场景。比如在行车中的车道线检测,泊车中的常见障碍物检测,自动驾驶感知最开始的方案基本都离不开IPM图。 早期,自动驾驶
【论文阅读】<YOLOP: You Only Look Once for PanopticDriving Perception>
Abstract 全视驾驶感知系统是自动驾驶的重要组成部分。一个高精度的实时感知系统可以帮助车辆在驾驶时做出合理的决策。我们提出了一个全视驾驶感知网络(您只需寻找一次全视驾驶感知网络(YOLOP)),以同时执行交通目标检测、可驾驶区域分割和车道检测。它由一个用于特征提取的编码器和三个用于处理特定任务的解码器组成。我们的模型在具有挑战性的BDD100K数据集上表现得非常好,在准确性和速度方面,在所
【论文阅读笔记】Frequency Perception Network for Camouflaged Object Detection
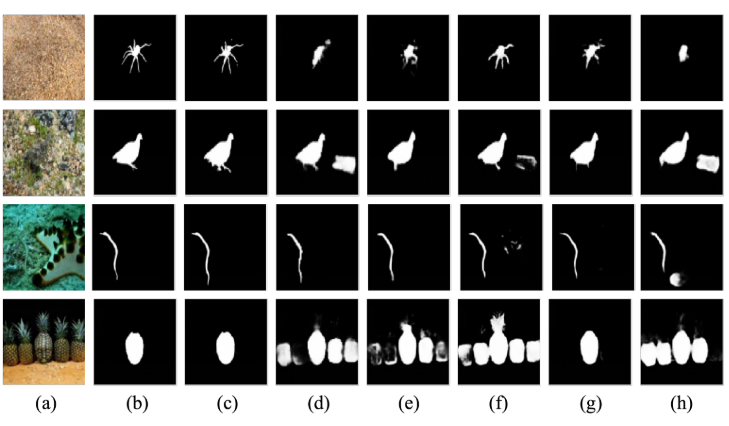
1.论文介绍 Frequency Perception Network for Camouflaged Object Detection 基于频率感知网络的视频目标检测 2023年 ACM MM Paper Code 2.摘要 隐蔽目标检测(COD)的目的是准确地检测隐藏在周围环境中的目标。然而,现有的COD方法主要定位在RGB域中的图像对象,其性能尚未得到充分利用,在许多具有挑战性的场景。

【ViT系列】TransNeXt: Robust Foveal Visual Perception for Vision Transformers
论文链接:https://arxiv.org/pdf/2311.17132.pdf 代码链接:https://github.com/DaiShiResearch/TransNeXt 一、摘要 1、引入了Pixel-focused Attention(PFA),它采用双路径设计。在一个路径中,每个查询对其最近邻特征具有细粒度的注意力,而在另一个路径中,每个查询对空间下采样特征具有粗粒度的注

因子图、边缘化与消元算法的抽丝剥茧 —— Notes for “Factor Graphs for Robot Perception“
Title: 因子图、边缘化与消元算法的抽丝剥茧 —— Notes for “Factor Graphs for Robot Perception” 文章目录 I. 前言II. 因子图的基本概念1. 因子图的定义2. SLAM 中的因子图A. 因子图的图示B. 因子图的因式C. 因子图的二分图形式 III. 边缘化与消元运算的基本原理1. 边缘化的定义2. SLAM 中的边缘化3.
【论文解读】Latency-Aware Collaborative Perception
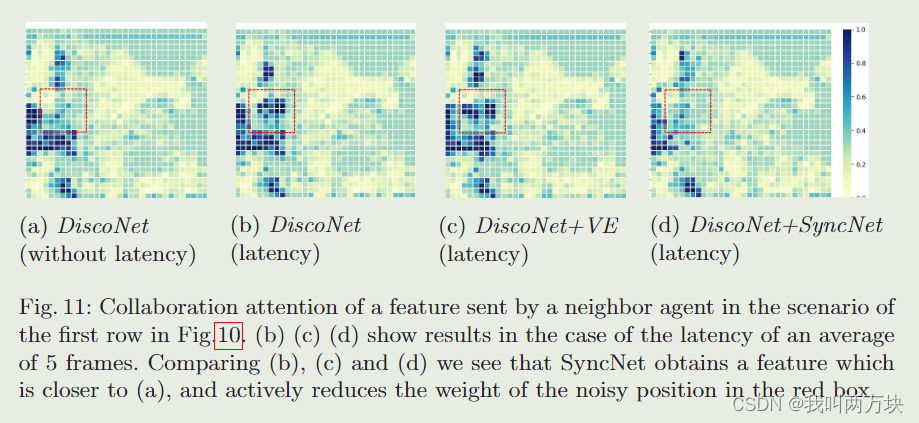
Latency-Aware Collaborative Perception 摘要引言方法SystemSyncNet 实验 摘要 协作感知最近显示出提高单智能体感知感知能力的巨大潜力。现有的协同感知方法通常考虑理想的通信环境。然而,在实践中,通信系统不可避免地存在延迟问题,导致安全关键应用中潜在的性能下降和高风险,如自动驾驶。为了减轻不可避免的延迟造成的影响,从机器学习的角度来看

感知机(Perception)原理小结
感知机(Perception)原理小结 1. 感知机模型2. 感知机学习策略3. 感知机学习算法3.1 感知机学习算法的原始形式3.2感知机学习算法的对偶形式 4. 手动实现感知机算法5. 模型评价完整代码地址参考 本博客中使用到的完整代码请移步至: 我的github:https://github.com/qingyujean/Magic-NLPer,求赞求星求鼓励~~~ 感

【图像拼接】论文精读:Perception-based energy functions in seam-cutting
第一次来请先看这篇文章:【图像拼接(Image Stitching)】关于【图像拼接论文精读】专栏的相关说明,包含专栏使用说明、创新思路分享等(不定期更新) 图像拼接系列相关论文精读 Seam Carving for Content-Aware Image ResizingAs-Rigid-As-Possible Shape ManipulationAdaptive As-Natural-As

Single-Image Depth Perception in the Wild 论文笔记
1. 摘要 这篇论文研究的是在无约束条件下从自然场景中的图片中恢复深度。Chen 等人提出了一种新的数据集 “Depth in the Wild”(DIW),其中包含了 495K 张图片,每张图片标注了一对随机的采样点以及它们的相对深度关系。同时,作者还提出了一种新的估计相对深度的算法(摘要中作者写的是估计绝对深度 metric depth,但我在看完论文后感觉应该是相对深度,因为估计的深度并不

大一统模型 Universal Instance Perception as Object Discovery and Retrieval 论文阅读笔记
Universal Instance Perception as Object Discovery and Retrieval 论文阅读笔记 一、Abstract二、引言三、相关工作实例感知通过类别名进行检索通过语言表达式的检索通过指代标注的检索 统一的视觉模型Unified Learning ParadigmsUnified Model Architectures 四、方法4.1 Pro
文章解读 -- MotionNet: Joint Perception and Motion Prediction for Autonomous Driving Based on Bird’s Eye
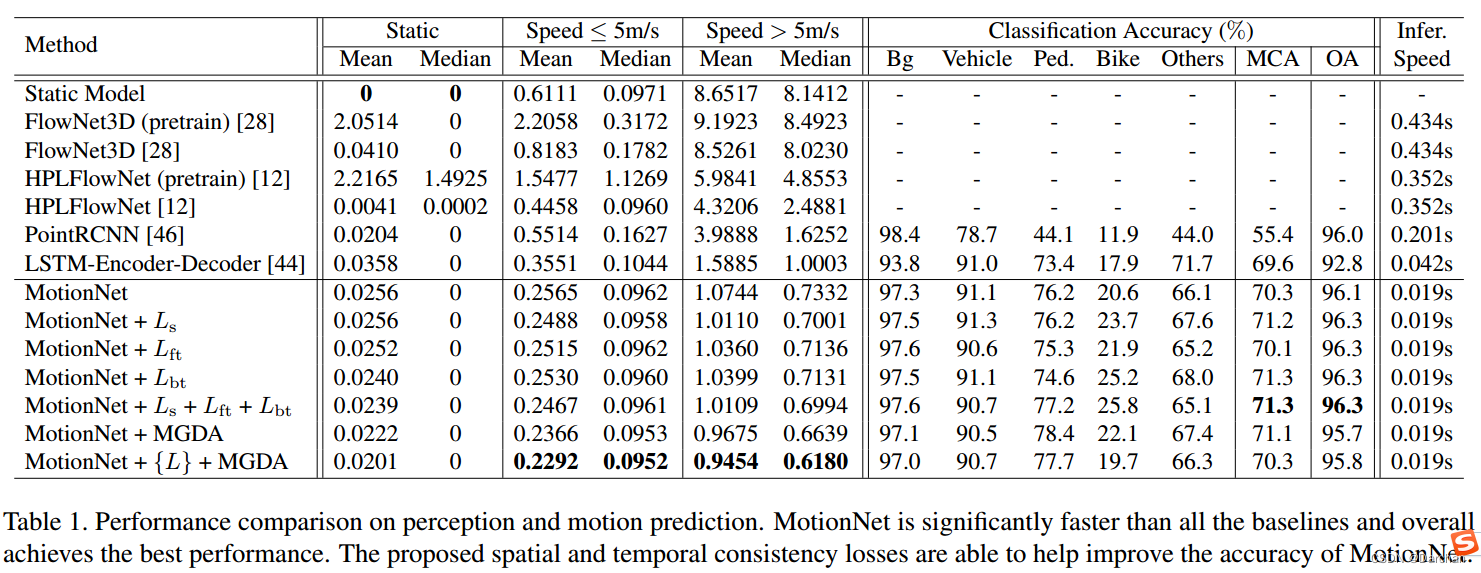
文章解读 – MotionNet: Joint Perception and Motion Prediction for Autonomous Driving Based on Bird’s Eye View Maps 摘要 可靠地感知环境状态的能力,特别是对物体的存在以及它们的运动行为判断,对于自动驾驶至关重要。在这项工作中,我们提出了一个高效的深度模型,称为 MotionNet,用于从 3
Learning for Vehicle-to-Vehicle Cooperative Perception under Lossy Communication
Learning for Vehicle-to-Vehicle Cooperative Perception under Lossy Communication
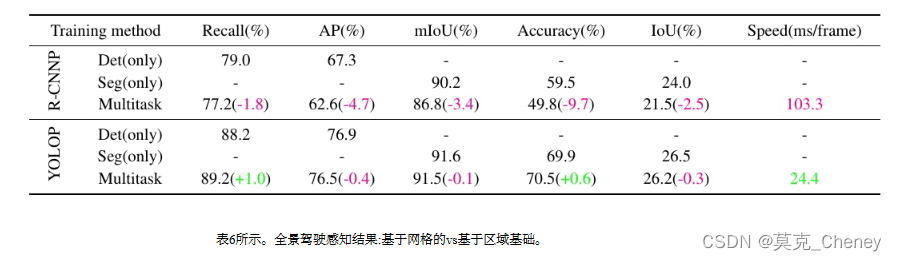
【freespace】YOLOP: You Only Look Once for Panoptic Driving Perception论文解读
目录 Abstract 摘要 1、简介 2、 相关工作 2.1. 交通目标检测 2.2. 可驾驶区域分割 2.3. 车道检测 2.4. 多任务的方法 3. 方法 3.1. 编码器 3.1.1 骨干 3.1.2 脖子 3.2. 解码器 3.2.1 探测头 3.2.2 可驾驶区域分段头&车道线分段头 3.3. 损失函数 3.4. 训练模式 4. 实验 4.1

Public Perception Analysis of Tweets During the 2015 阅读笔记
目标:理解公众对于疾病爆发的态度并且证明CNN在对outbreak-related tweets 分类的优势 方法:设计了一个用于分析用户对于疾病爆发态度的综合框架,该框架分为3个维度:讨论主题,情感表达,对疫苗的态度。先利用“Measles”爬取数据,然后根据那三个维度进行标注,然后建立了一个CNN分类模型,并且在CNN模型中利用不同的embedding方法(1、Stanford GloVe
CORE: Cooperative Reconstruction for Multi-Agent Perception 论文阅读
论文连接 CORE: Cooperative Reconstruction for Multi-Agent Perception 0. 摘要 本文提出了 CORE,一种概念简单、有效且通信高效的多智能体协作感知模型。 从合作重建的新颖角度解决了该任务: 合作主体共同提供对环境的更全面的观察整体观察可以作为有价值的监督,明确指导模型学习如何基于协作重建理想的观察 CORE 利用三个组
![论文笔记[2] Re-Representing Metaphor: Modeling Metaphor Perception Using Dynamically Contextual ...](https://img-blog.csdnimg.cn/20201025012424554.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80MDI2NzUwMQ==,size_16,color_FFFFFF,t_70#pic_center)
论文笔记[2] Re-Representing Metaphor: Modeling Metaphor Perception Using Dynamically Contextual ...
论文题目:Re-Representing Metaphor: Modeling Metaphor Perception Using Dynamically Contextual Distributional Semantics 论文地址: https://www.researchgate.net/publication/332431541 论文作者:Stephen McGregor, Kat Ag

论文阅读:Fast-BEV: Towards Real-time On-vehicleBird’s-Eye View Perception
Abstract 现有的BEV解决方案要么需要大量的资源执行车载推理,要么效果一般。Fast-BEV包含五部分: 1)一个轻量化部署友好的视角转换方式,可以快速将2D图像特征转到3D体素空间。 2)一个多尺度图像编码器利用多尺度特征。 3)高效的BEV编码器,专为车载推理加速。 4)对图像和BEV空间的数据增强(Data Augmentation)策略,以避免过拟合。 5)一种多帧融合机制利用空
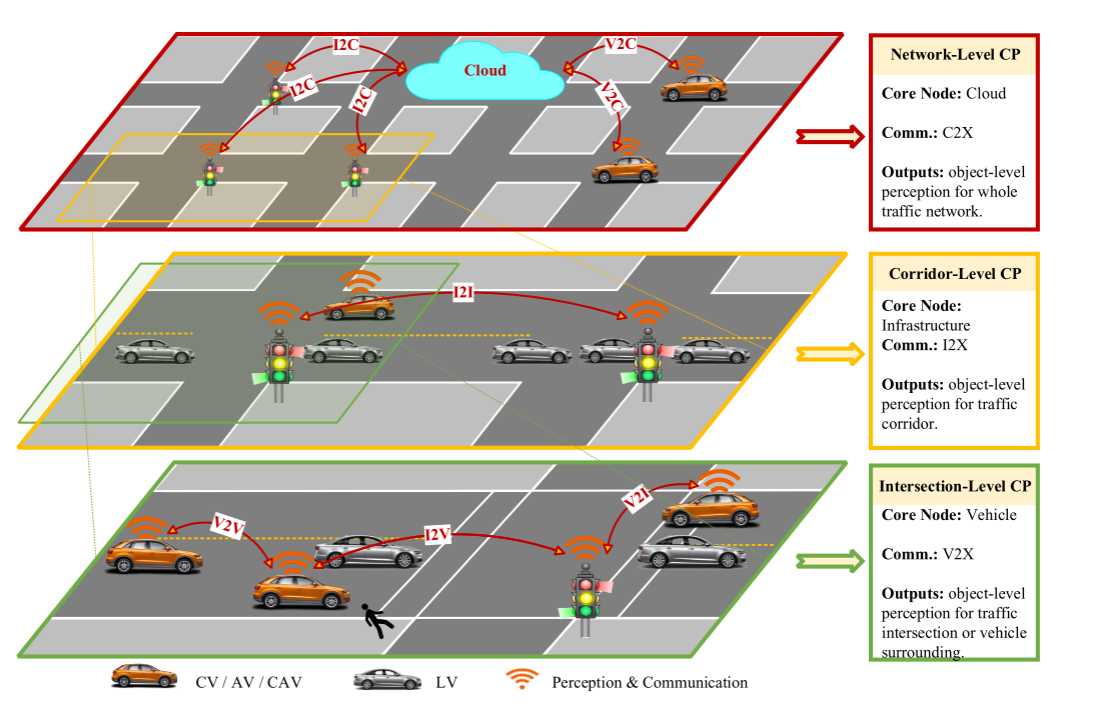
A Survey and Framework of Cooperative Perception 论文阅读
论文链接 A Survey and Framework of Cooperative Perception: From Heterogeneous Singleton to Hierarchical Cooperation 0. Abstract 首次提出统一的 CP(Cooperative Percepetion) 框架回顾了基于不同类型传感器的 CP 系统与分类对节点结构,传感模态和