pclpy专题
pclpy 最小二乘法拟合平面
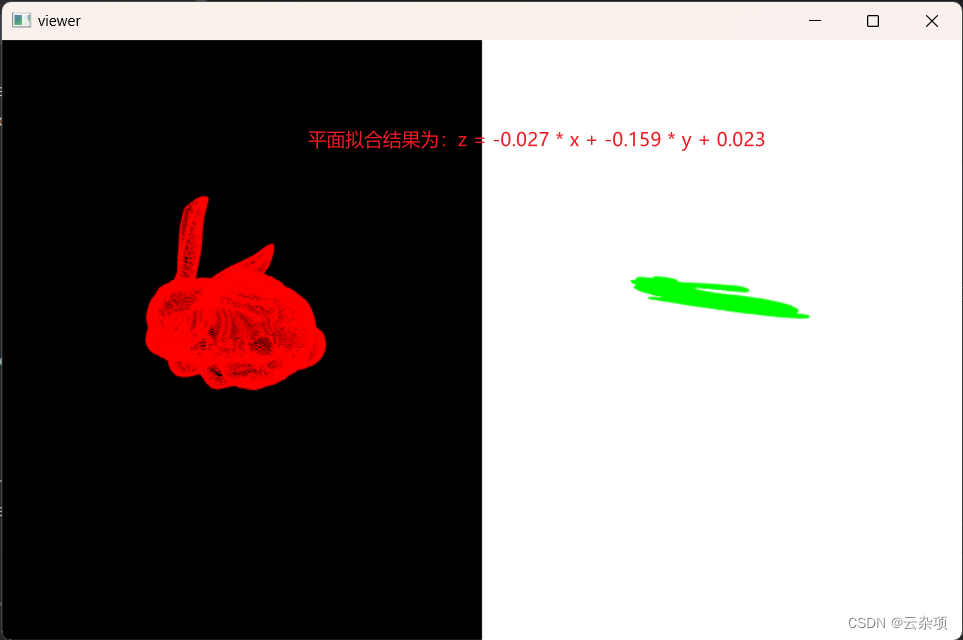
pclpy 最小二乘法拟合平面 一、算法原理二、代码三、结果1.左边原点云、右边最小二乘法拟合平面后点云投影 四、相关数据 一、算法原理 平面方程的一般表达式为: A x + B y + C z + D = 0 ( C ≠ 0 ) Ax + By + Cz + D = 0 \quad (C\neq0) Ax+By+Cz+D=0(C=0) 即: Z = − A C x
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集
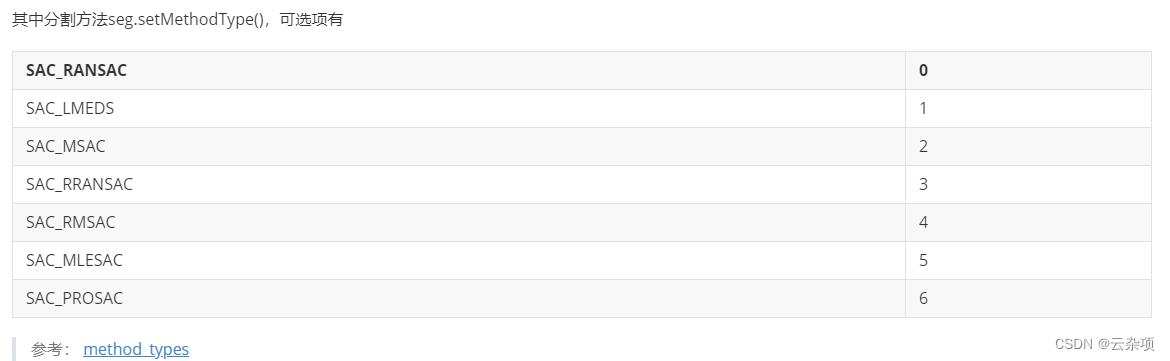
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集 一、算法原理二、代码三、结果1.`sor`统计滤波2.`Ransac`内点分割平面3.`Ransac`外点分割平面 四、相关数据 一、算法原理 1、Ransac介绍 RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学

pclpy 可视化点云(多窗口可视化、单窗口多点云可视化)
pclpy 可视化点云(多窗口可视化、单窗口多点云可视化) 一、算法原理二、代码三、结果1.多窗口可视化结果2.单窗口多点云可视化 四、相关数据五、问题与解决方案1.问题2.解决 一、算法原理 原理看一下代码写的很仔细的。。目前在同一个窗口最多建立2个窗口。 多数据可视化把点云的名字更改一下即可,就在一个窗口下可视化多个点云。 二、代码 from pclpy imp