本文主要是介绍pclpy 可视化点云(多窗口可视化、单窗口多点云可视化),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
pclpy 可视化点云(多窗口可视化、单窗口多点云可视化)
- 一、算法原理
- 二、代码
- 三、结果
- 1.多窗口可视化结果
- 2.单窗口多点云可视化
- 四、相关数据
- 五、问题与解决方案
- 1.问题
- 2.解决
一、算法原理
原理看一下代码写的很仔细的。。目前在同一个窗口最多建立2个窗口。
多数据可视化把点云的名字更改一下即可,就在一个窗口下可视化多个点云。
二、代码
from pclpy import pcldef multiCloudShow(cloud1, cloud2):"""Args:多点云可视化在同一个窗口cloud1: 点云数据cloud2: 点云数据"""viewer = pcl.visualization.PCLVisualizer("viewer") # 建立可刷窗口对象 窗口名 viewersingle_color = pcl.visualization.PointCloudColorHandlerCustom.PointXYZ(cloud1, 255.0, 0, 0.0) # 将点云设置为红色viewer.addPointCloud(cloud1, # 要添加到窗口的点云数据。single_color, # 指定点云的颜色"sample cloud1", # 添加的点云命名) # 点云添加到的视图single_color = pcl.visualization.PointCloudColorHandlerCustom.PointXYZ(cloud2, 0.0, 255.0, 0.0) # 将点云设置为绿色viewer.addPointCloud(cloud2, # 要添加到窗口的点云数据。single_color, # 指定点云的颜色"sample cloud2", # 添加的点云命名) # 点云添加到的视图# 窗口建立while not viewer.wasStopped():viewer.spinOnce(10)def compareCloudShow(cloud1, cloud2):"""Args:在一个窗口生成2个窗口可视化点云cloud1: 点云数据1cloud2: 点云数据2"""viewer = pcl.visualization.PCLVisualizer("viewer") # 建立可刷窗口对象 窗口名 viewerv0 = 1 # 设置标签名(0, 1标记第一个窗口)viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v0) # 创建一个可视化的窗口viewer.setBackgroundColor(0.0, 0.0, 0.0, v0) # 设置窗口背景为黑色single_color = pcl.visualization.PointCloudColorHandlerCustom.PointXYZ(cloud1, 255.0, 0, 0.0) # 将点云设置为红色viewer.addPointCloud(cloud1, # 要添加到窗口的点云数据。single_color, # 指定点云的颜色"sample cloud1", # 添加的点云命名v0) # 点云添加到的视图v1 = 2 # 设置标签名(2代表第二个窗口)viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v1) # 创建一个可视化的窗口viewer.setBackgroundColor(255.0, 255.0, 255.0, v1) # 设置窗口背景为白色single_color = pcl.visualization.PointCloudColorHandlerCustom.PointXYZ(cloud2, 0.0, 255.0, 0.0) # 将点云设置为绿色viewer.addPointCloud(cloud2, # 要添加到窗口的点云数据。single_color, # 指定点云的颜色"sample cloud2", # 添加的点云命名v1) # 点云添加到的视图# 设置点云窗口(可移除对点云可视化没有影响)viewer.setPointCloudRenderingProperties(0, # 设置点云点的大小1, # 点云像素"sample cloud1", # 识别特定点云v0) # 在那个窗口可视化viewer.setPointCloudRenderingProperties(0, # 设置点云点的大小1, # 点云像素"sample cloud2", # 识别特定点云v1) # 在那个窗口可视化viewer.addCoordinateSystem(1.0) # 设置坐标轴 坐标轴的长度为1.0# 窗口建立while not viewer.wasStopped():viewer.spinOnce(10)if __name__ == '__main__':# 读取一个点云cloud1 = pcl.PointCloud.PointXYZ()reader = pcl.io.PCDReader() # 设置读取对象reader.read('res/bunny.pcd', cloud1) # 读取点云保存在cloud中# 读取一个点云cloud2 = pcl.PointCloud.PointXYZ()reader = pcl.io.PCDReader() # 设置读取对象reader.read('res/table_scene_lms400.pcd', cloud2) # 读取点云保存在cloud中multiCloudShow(cloud1, cloud2) # 一个窗口可视化多个点云三、结果
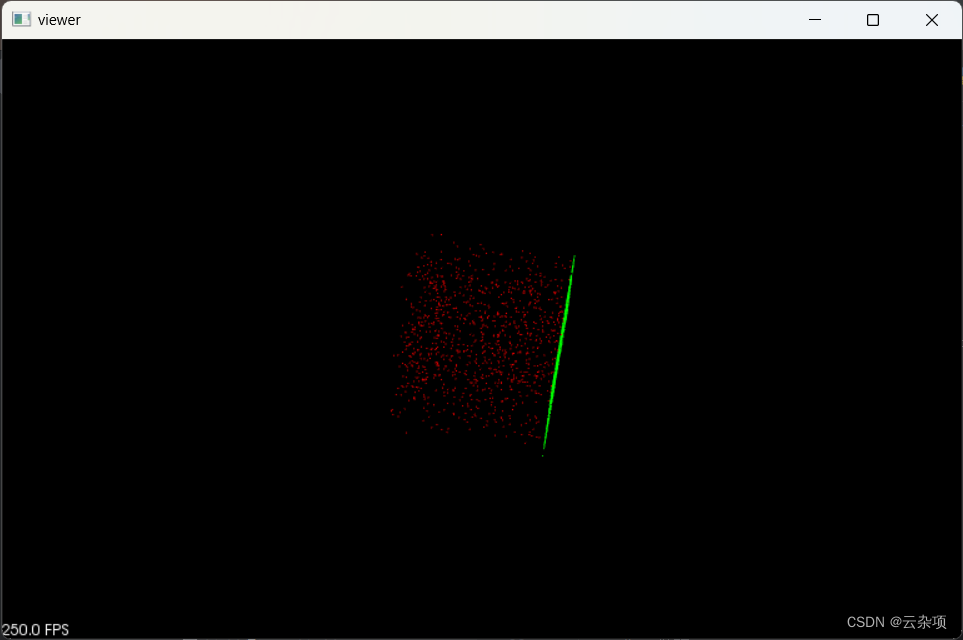
1.多窗口可视化结果
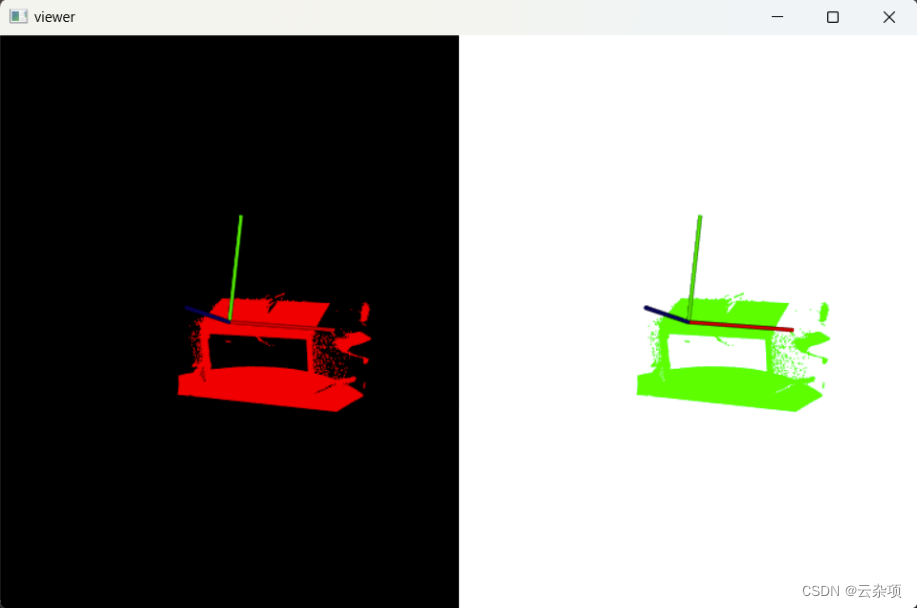
2.单窗口多点云可视化
四、相关数据
测试数据链接:https://pan.baidu.com/s/1am-4qlxuX_l6uoDeIbpPrA
提取码:ffs2
五、问题与解决方案
1.问题

2.解决
报错原因:添加到可视化窗口的的点云名重复
解决:更改点云名在窗口的名即可
这篇关于pclpy 可视化点云(多窗口可视化、单窗口多点云可视化)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







