openpcdet专题
使用OpenPCDet训练与测试多传感器融合模型BEVFusion,OPenPCdet代码架构介绍
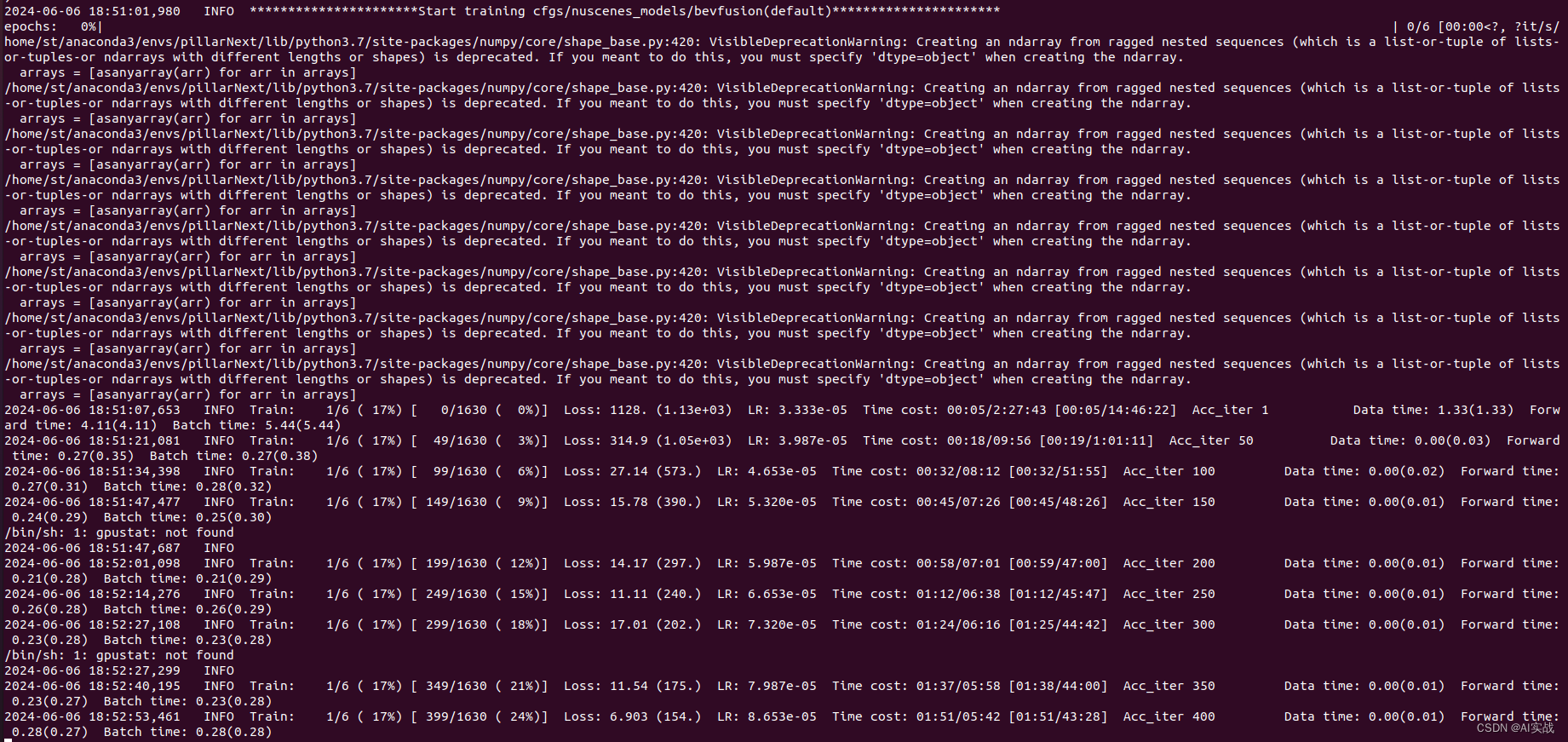
引言 在自动驾驶领域,多传感器融合技术是一种常见的方法,用于提高感知系统的准确性和鲁棒性。其中,BevFusion是一种流行的融合方法,可以将来自不同传感器的数据进行融合,生成具有丰富信息的鸟瞰图(BEV)表示。在本文中,我们将介绍如何使用OpenPCdet框架训练和测试多传感器融合BevFusion 环境搭建与数据准备 安装OpenPCDet: 确标Python环境,确保安装PyTorc
使用OpenPCDet训练与测试Transformer模型:如何加载自己的数据集
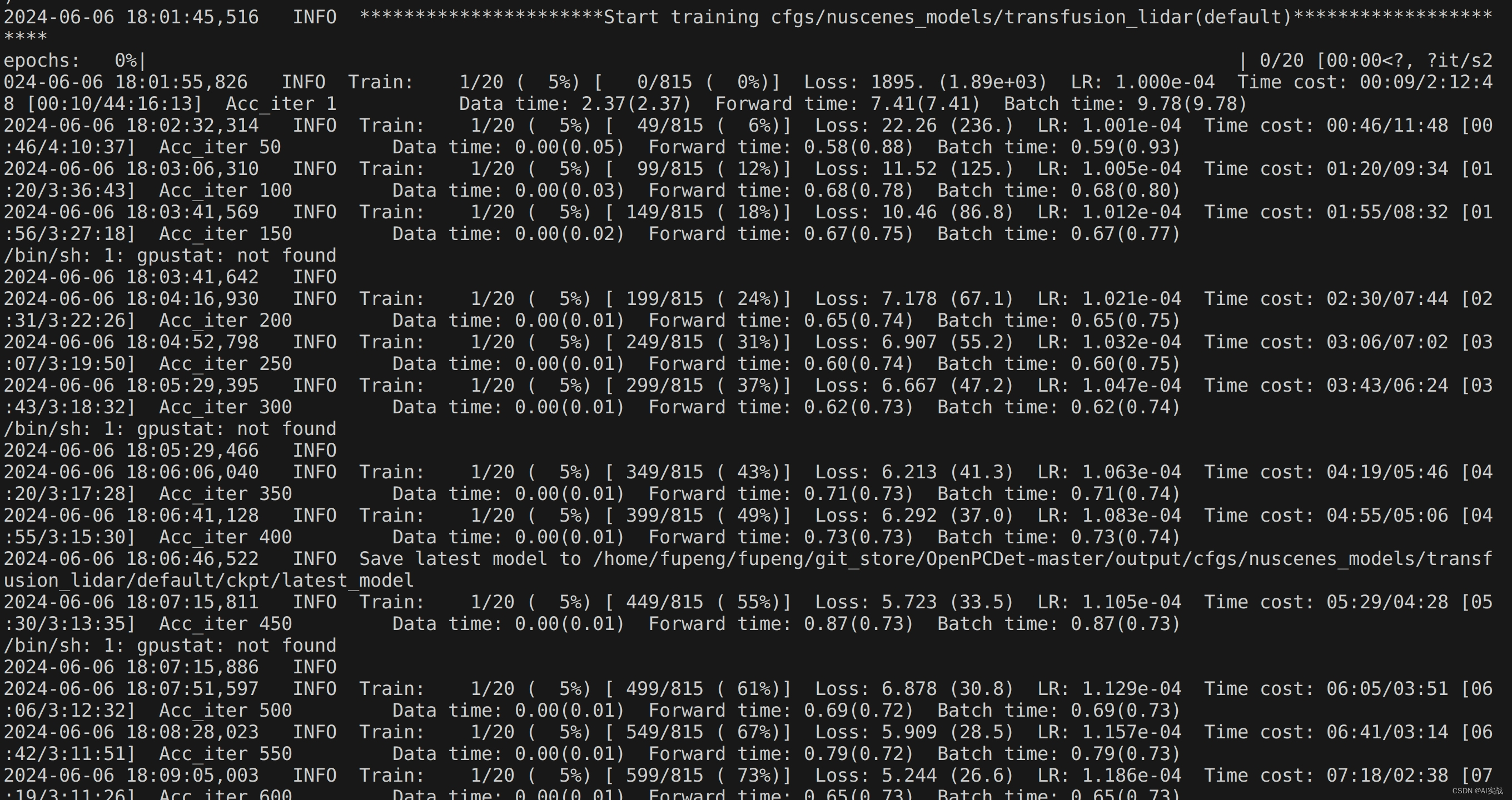
引言 Transformer架构因其强大的序列处理能力和长距离依赖捕捉能力,在自然语言处理领域取得了巨大成功。近年来,这一架构也被引入3D物体检测领域,如Voxel Transformer等,显著提升了模型在复杂场景下的检测性能。OpenPCDet整合了多种先进的检测模型,包括基于Transformer的架构,为用户提供了丰富的选择。 环境搭建与数据准备 安装OpenPCDet: 确标Py

安装、测试和训练OpenPCDet:一篇详尽的指南
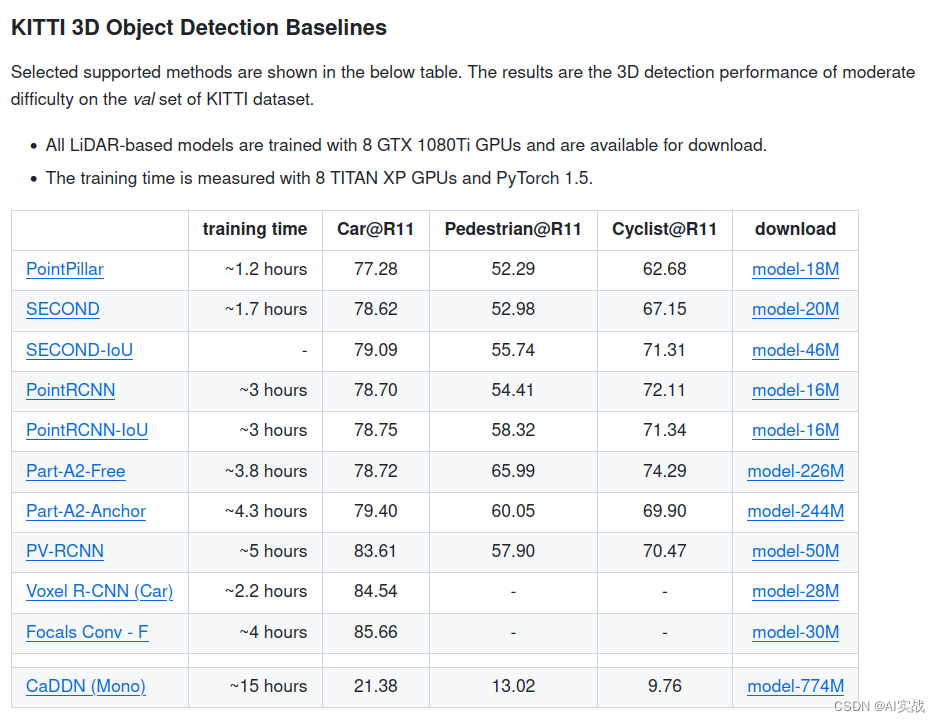
简介 OpenPCDet是一个用于3D目标检测的开源工具箱,它提供了多种数据集的加载器,支持多种模型,并且易于扩展。在本博客中,我将引导你完成OpenPCDet的安装过程,并展示如何测试和训练预训练模型。 安装OpenPCDet 环境要求 在开始之前,请确保你的系统满足以下要求: Linux操作系统(Ubuntu 14.04/16.04/18.04/20.04/21.04已测试)Pyth
3D目标检测入门:探索OpenPCDet框架
前言 在自动驾驶和机器人视觉这两个飞速发展的领域中,3D目标检测技术扮演着核心角色。随着深度学习技术的突破性进展,3D目标检测算法的研究和应用正日益深入。OpenPCDet,这个由香港中文大学OpenMMLab实验室精心打造的开源工具箱,为3D目标检测领域提供了一个功能强大且易于使用的平台。本文将带您走进OpenPCDet的世界,一探3D目标检测的奥秘。 主流3D目标检测框架概览 目前,有几

【openpcdet中yaml文件的DATA_AUGMENTOR学习】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、代码二、详细解释DISABLE_AUG_LISTAUG_CONFIG_LIST1. gt_sampling2. random_world_flip3. random_world_rotation4. random_world_scaling 总结 前言 提示:这里可以添加本文要记录的
【openpcdet中yaml文件的MODEL学习】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、代码二、详细解释MODEL: NAME: PointPillarMAP_TO_BEV (Mapping to Bird's Eye View):BACKBONE_2D (2D Backbone Network): 总结 前言 提示:这里可以添加本文要记录的大概内容: openpcde
3D目标检测实用技巧(四)- OpenPCDet改变预测类别
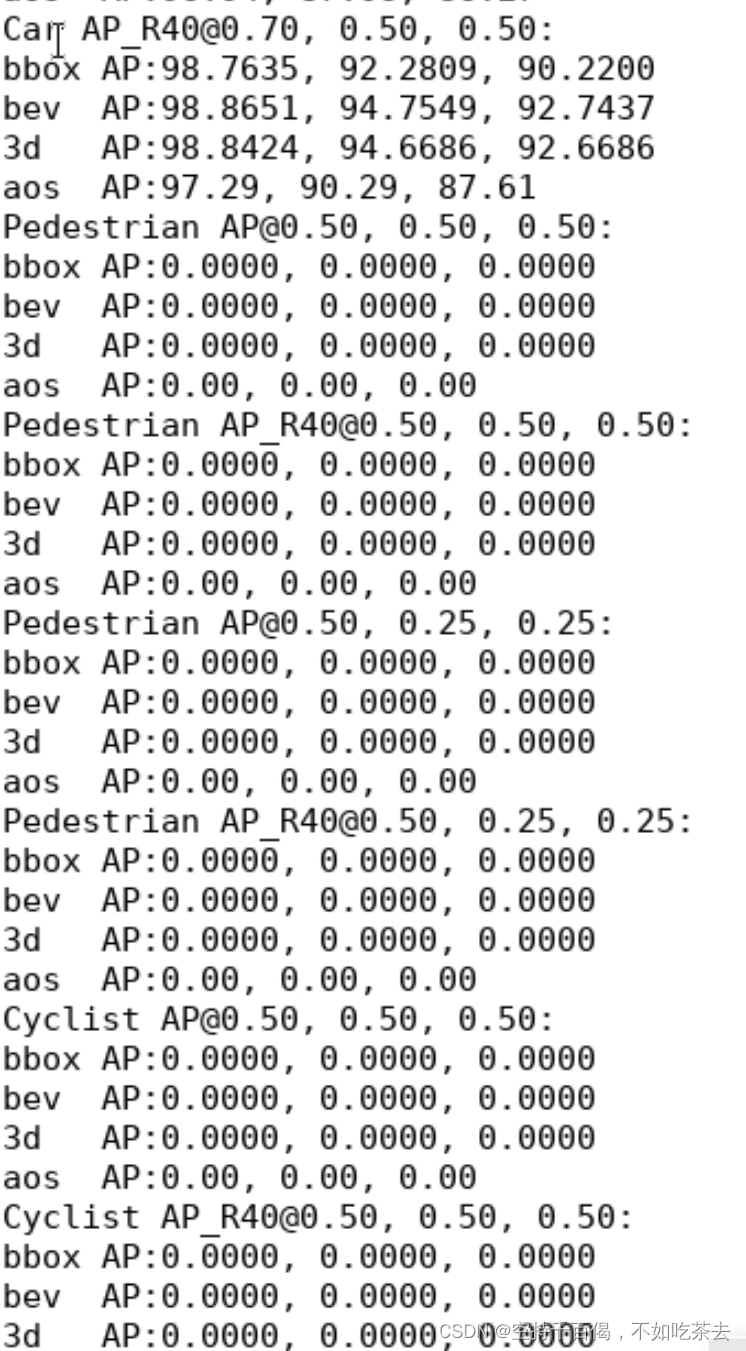
一、引言 本次探讨的问题是:如何通过OpenPCDet改变预测的类别? 假设:我们原来预测的类别是Car,如何仅在yaml文件中添加一些配置,使得模型能够同时预测出Pedestrians和Cyclists。 下面就这个问题简单复现一下。 二、复现过程 首先我们以VirConv举例: 在VirConv.yaml文件中,上面的Class只有['Car']类别,因此首先我们要做的是要把其

安装OpenPCDet碰到的问题
Ubuntu18.04重新安装了,现在要把OpenPCDet也重新装上,按照官方的教程来,一路安装好了torch, numpy之类的东西,没碰到问题,之后 开始安装OpenPCDet,然后就碰到了下面的问题, 问题1 IndexError: list index out of range (openmmlab) user@MS-7816:~/devAI/OpenPCDet$ pytho
![[Openpcdet] Conda 更新 GCC版本 + Openpcdet踩坑之部分坑](https://img-blog.csdnimg.cn/direct/8168455cbda744d2b0523b7f6fc7fe81.png)
[Openpcdet] Conda 更新 GCC版本 + Openpcdet踩坑之部分坑
Conda 环境中更新gcc版本,下面以在安装gcc9.3的版本为例,具体记录一下每个步骤的作用: 首先,在Search :: Anaconda.org conda 官方网站上搜索对应的gcc版本的安装命令,我这里的安装gcc 9.3 ,但是我们搜索的时候可能会出现多个如何区分呢? 这里是因为,看到很多其他网上资料上安装7.3的时候的命令是,gcc_linux-64,那么每个版本的不同在于前

openpcdet中的优化器
OPTIMIZATION 优化器用于对梯度、学习率等进行调整 下面是一个优化器的配置: OPTIMIZATION:BATCH_SIZE_PER_GPU: 4NUM_EPOCHS: 10OPTIMIZER: adam_onecycleLR: 0.001WEIGHT_DECAY: 0.04MOMENTUM: 0.8MOMS: [0.85, 0.75]PCT_START: 0.1DIV_FACTOR
炼丹学习笔记1---openPCDet训练配置参数含义介绍
背景:最近偷闲学习openPCDet,记录一下基本训练可能用到的一些配置。以下为个人学习探索,仅供参考。 1、cfg_file 含义: 指定用于训练的配置文件,其中包含了模型、优化器、学习率等相关的配置信息。 作用: 通过配置文件统一管理各种超参数,方便在不同的实验中灵活调整模型和训练设置。 2、batch_size 含义: 每个训练步中用于更新模型参数的样本数。 作用: 控制模型参数的更

安装openpcdet
安装openpcdet 本机配置安装cuda,对因版本的cudnncuda安装cudnn 安装anacondaconda 指令 Cmake安装安装中间出现的错误及解决 安装spconvERROR测试spconv 安装OpenPCDetERROR:GPU算力与pytorch不匹配 安装mayavi 4.7.3跑DEMOERROR成功显示 本机配置 RTX3070 Ubuntu 2
NuScenes Dataset的坐标系及OpenPCDet里针对NuScenes Dataset格式的输入输出数据的坐标系转换
网上很多文章只提了NuScenes坐标系有哪些,但是没有找到一篇文章把NuScenes坐标系的转换结合代码说全说明白了,结合工作需要,针对OpenPCDet里读取NuScenes数据集对数据做坐标转换的代码说一下。 OpenPCDet是3D点云目标检测框架,顾名思义,模型的输入数据都是点云数据!只有在近来OpenPCDet把多模态融合模型BEVFusion加入进来后才考虑了图像和点云两种输入数据

【OpenPCDet代码阅读日记】【kitti_dataset.py】
1.Python中sys.argv的用法 https://blog.csdn.net/csdn15698845876/article/details/74909089 2.Python -m 的含义 将模块用作脚本去运行 https://www.cnblogs.com/maoguy/p/6670988.html 3.yaml入门 https://www.runoob.com/w3cn

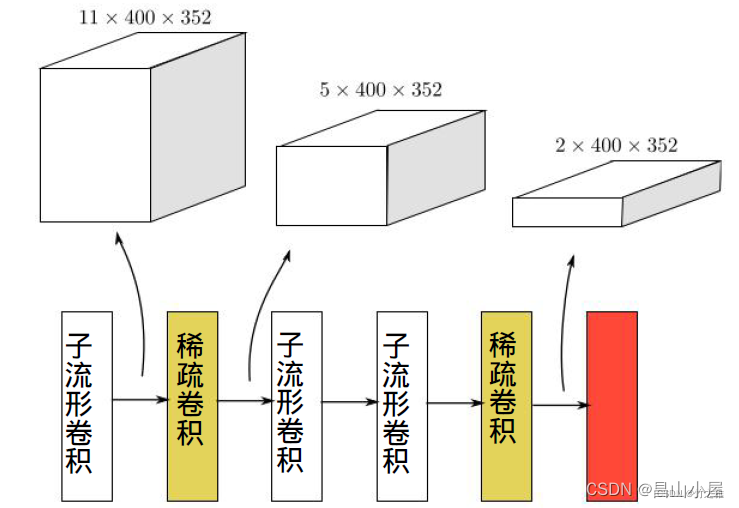
【OpenPCDet】稀疏卷积SPConv-v1.2代码解读(3)
【构建rulebook】 传统卷积通过img2col实现,稀疏卷积通过Rulebook来实现。什么是Rulebook? 本质上来说就是一个表。先通过建立输入、输出的哈希表,分别将输入、输出的张量坐标映射到序号。再将输入、输出的哈希表中的序号建立起联系,这样就可以基本实现稀疏卷积,因此这也是稀疏卷积实现的关键。项目代码中建立rulebook这一步会调用Python函数get_ind
【OpenPCDet】稀疏卷积SPConv-v1.2代码解读(2)
【SPConv模块Python部分代码】 在上一篇文章里分别展示了spconv源码中的Python和c++/cuda目录,这里再来看一下spconv编译安装完后的目录结构。 (openpcd) ➜ spconv tree -L 1.├── conv.py├── functional.py├── identity.py├── __init__.py├── libcu
【OpenPCDet】稀疏卷积SPConv-v1.2代码解读(1)
【3D卷积】 以下左图展示了一个2D卷积,使用一个3x3的卷积核,在单通道图像上进行卷积,其中Padding为1,得到输出。右图为一个单通道的3D卷积,与2D卷积不同之处在于,输入图像多了一个 depth 维度,卷积核也多了一个depth维度,之前2D卷积上3x3的卷积核现在变成了3x3x3。这里的3D不是通道导致的,而是深度(多层切片,多帧视频),因此,虽然输入和卷积核和输出都