offboard专题

无人机 PX4 飞控 | ROS应用层开发:offboard 模式切换详细总结
无人机 PX4 飞控 | ROS应用层开发:offboard 模式切换详细总结 PX4 offboard 模式介绍通过mavros 进行offboard模式切换代码测试 通过地面站进行offboard模式切换通过遥控器拨杆切换offboard模式 PX4 offboard 模式介绍 PX4 是一个广为熟知的开源飞控软件,常用于无人机(UAV)和其它自主飞行器的控制。 在PX

超维小课堂 | 7、ROS使用offboard模式控制无人机定点悬停源码分析
引言:ROS使用offboard模式控制无人机进入定点悬停是学习ROS无人机控制的最经典的基本功能之一。基于此,本篇主要对此处的控制流程著一个简要的代码分析。(室内外通用代码) 顾名思义:offboard模式下的定点悬停是指通过机载电脑ROS发布指定的目标点,无人机按照程序发布的目标位置进行PID控制,到达后目标点后保持悬停不动。源码分析可以查看代码注释即可。 此处为视频详解: 源码视频详解

对PX4官方手册里mavros-offboard代码注释讲解的博文合集
https://blog.csdn.net/sinat_16643223/article/details/114249331 下面前两个其实是转载的同一篇文章,只是转载时间不同,最近看理解又更深了。 https://blog.csdn.net/sinat_16643223/article/details/114196439 https://blog.csdn.net/sinat
对PX4官方手册里mavros-offboard代码注释讲解的博文合集
https://blog.csdn.net/sinat_16643223/article/details/114249331 下面前两个其实是转载的同一篇文章,只是转载时间不同,最近看理解又更深了。 https://blog.csdn.net/sinat_16643223/article/details/114196439 https://blog.csdn.net/sinat
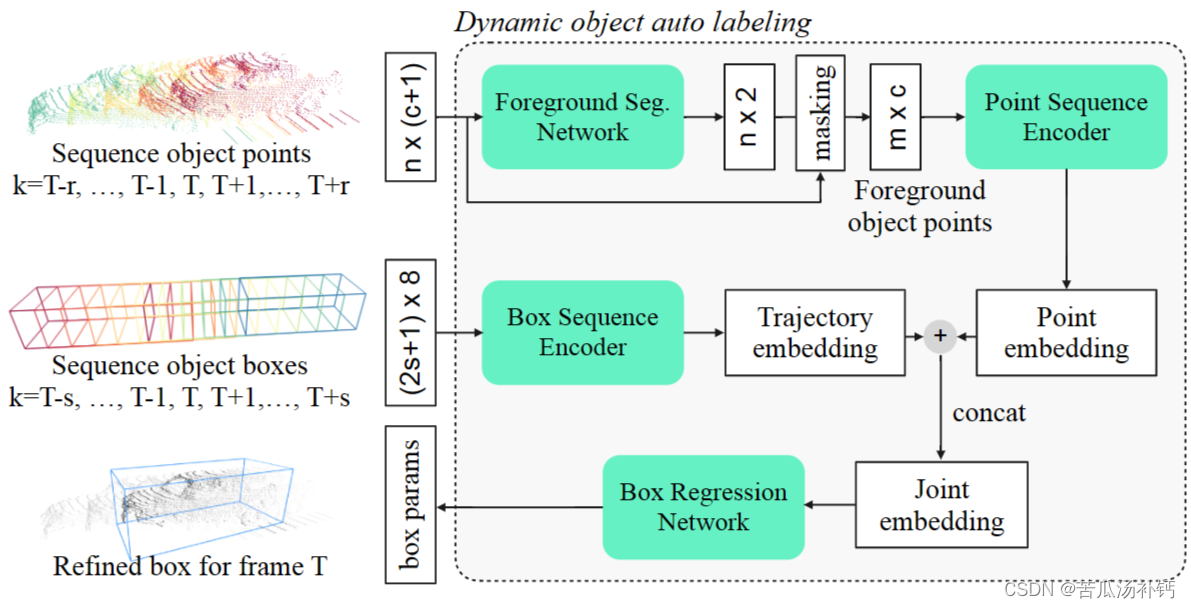
论文阅读:Offboard 3D Object Detection from Point Cloud Sequences
目录 概要 Motivation 整体架构流程 技术细节 3D Auto Labeling Pipeline The static object auto labeling model The dynamic object auto labeling model 小结 论文地址:[2103.05073] Offboard 3D Object Detection from Po