octomap专题

将octomap的离线与在线生成栅格地图功能结合到一个功能包里
在之前的教程中,我已经分别完成了离线和在线生成栅格地图,但是这样会有两个工作空间,不方便,所以把他们集中到一个功能包里去,方便使用,很简单,记录一下。 一、离线教程 pointcloud_publisher: 将点云文件内容数据发布到话题 /pointcloud/output、使用octomap_server_node接收数据并生成Octomap、使用rviz查看点云及对应的Octomap这个

8、在ubuntu16.04 、ROS下使用 rviz 显示octomap_sever 构建的三维栅格地图
ROS下使用 rviz 显示octomap_sever 构建的三维栅格地图 本文是在安装完了octomap_sever 后(octomap_sever安装方法在这里:octomap_sever安装及demo、自己的pcd点云数据测试,基于八叉树的三维的栅格地图构建),使用ROS 自带的RVIZ显示自己的PCD点云文件构建的八叉树的教程。 1、安装octomap 在 rviz 中的插件: su

7、octomap_sever安装及demo、自己的pcd点云数据测试,基于八叉树的三维的栅格地图构建
octomap_sever安装及demo、自己的pcd点云数据测试 基于八叉树的三维的栅格地图构建 文章开头先贴一下:高博关于八叉树的博客 1.编译octomap 新建一个目录用于拷贝octomap代码。 如果没有git请安装git,然后拷贝代码: sudo apt-get install gitgit clone https://github.com/OctoMap/octomap

octomap_server使用--生成二维占据栅格地图和三维概率地图
octomap_server是ROS中的一个基于octomap的功能包。我在查阅资料的时候,发现所有的介绍、博客等资料都是在介绍其将点云地图转化为基于Octree的OctoMap的功能。由于之前一直在查找三维点云地图转化为二维地图的方法,所以之前试过这个包的三维转换功能后就没有在继续使用,由于之前使用其他方法将二维占据栅格地图生成了,然后准备回过头来再看一下octomap_server的三维概
rviz中显示的点云与网格垂直,将保存的pcd文件转为点云在rviz中显示,并使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
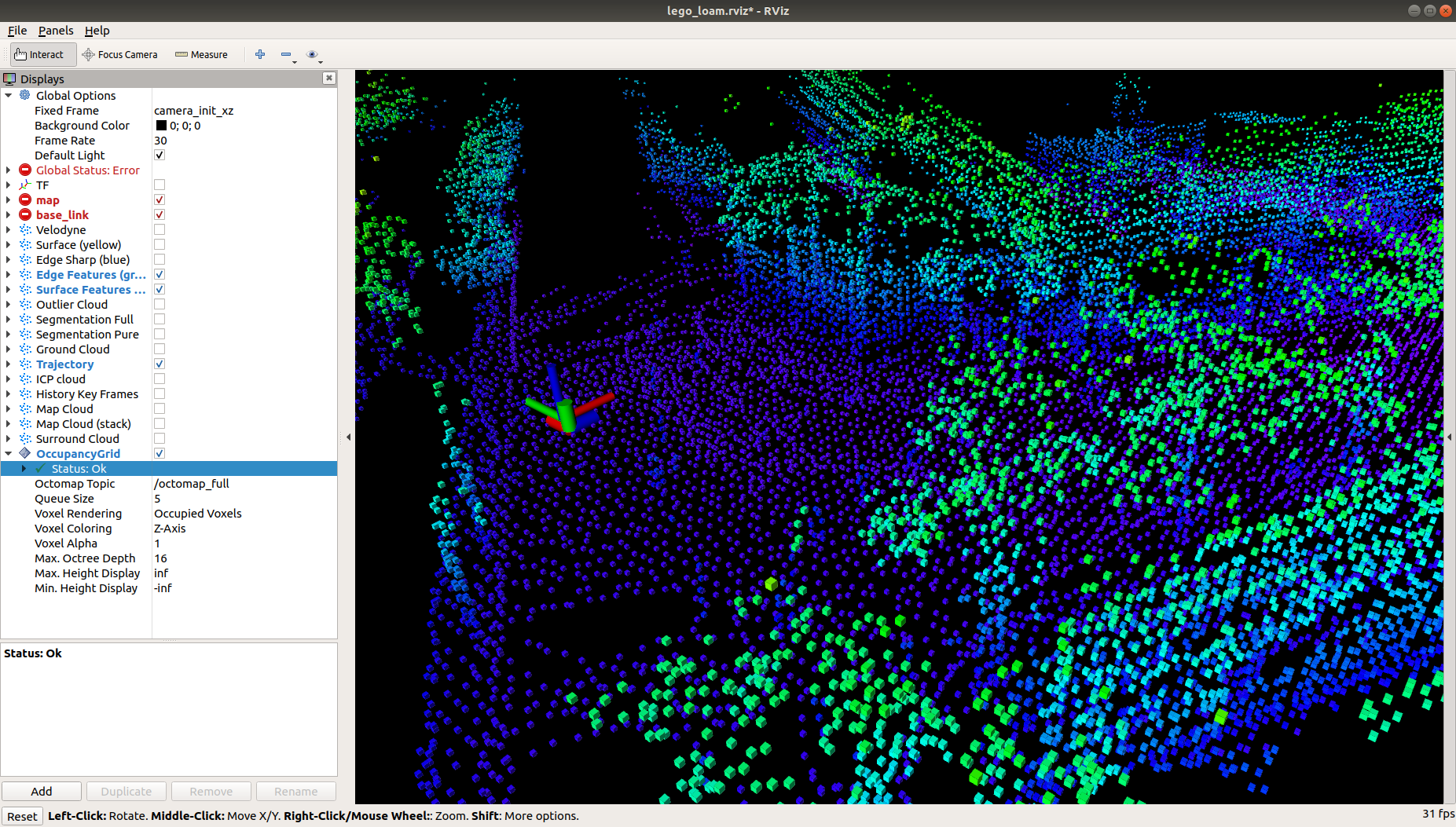
文章目录 问题:点云与网格垂直背景解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方将pcd转成点云,在RVIZ中显示点云图创建launch rviz显示 问题:点云与网格垂直 用lego-loam建图时用rosbag录制相关点云的话题,建图结束后用rosbag play将.bag包在rviz中显示,但是由于该话题的点云发布的frame_id=/camera_ini

slam稠密建图以及构建octomap
之前总说ORB-SLAM2构建的稀疏地图,只是为了定位用的,想要使用地图导航或是别的还是得搞稠密地图,然后就运行了高翔博士改的稠密建图版本。 虽然效果看起来好看了一点,还是不知道怎么个用法,因此还需要整成八叉树地图,具体怎么整 见下方博客 https://blog.csdn.net/crp997576280/article/details/74605766 按照他的方法基本没有问题 但是