nao专题


NAO学习第二周——NAOqi Audio
目标 深度对话 避障 看相关论文至少三篇 查阅资料 悉尼科技大学NAO机器人远程控制NAO的C++_python环境配置NAOqi Audio——官方文档阿里云NAO深层开发的环境搭建(只需要安装python-2.7.10、pynaoqi-2.1.4.13.win32便可以开始使用Python编程啦!) 进展 1. 浏览总况 把NAOqi API文档大概浏览了


用实际案例来理解netstat -nao中的Recv-Q和Send-Q
我们先来看看: xxxxxx$ netstat -ano | head Active Internet connections (servers and established)Proto Recv-Q Send-Q Local Address Foreign Address State Timer


NAO团队任务——阻塞和非阻塞调用
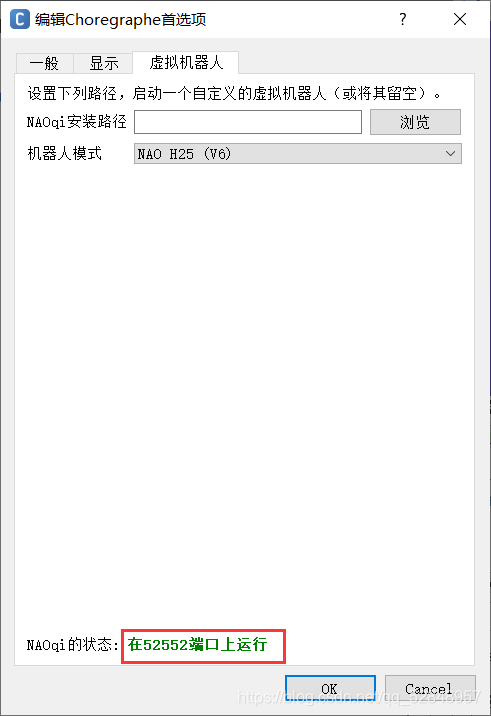
NAO团队任务——阻塞和非阻塞调用 机器人连接阻塞和非阻塞调用任务解析任务1.1题目:使虚拟机器人移动到正前方一米距离,并且在移动过程中每隔 0.5s 重复说一句话,说五遍,内容自定义。代码 任务1.2题目:使虚拟机器人移动到右侧一米距离,并且在移动后说一句话,内容自定义。代码①代码② 遇到过的BUG 机器人连接 示例: from naoqi import ALProxym